Изобретение относится к шахтному подъему и предназначено для защиты рудничных подъемных установок от опасного превышения скорости.
Цель изобретения состоит в повышении производительности шахтной подъемной установки.
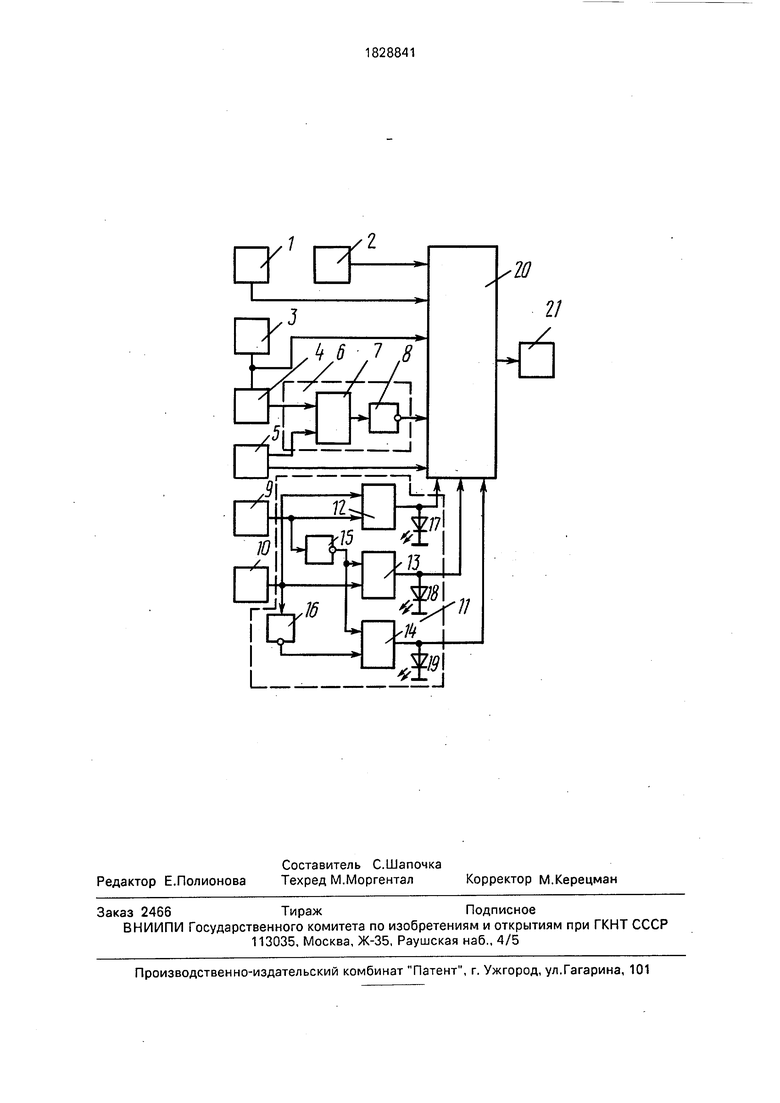
На чертеже изображена функциональная схема устройства, реализующего предложенный способ.
Устройство содержит стволовой концевой выключатель 1, концевой выключатель 2 контроля сцепления барабанов, импульсный датчик 3 пути, датчик 4 направления движения, датчик 5 концевой нагрузки, узел 6 определения направления движения груза, состоящий из элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 7 и инвертора 8, переключатель
ЛЮДИ - ГРУЗ 9, переключатель КЛЕТЬ - СКИП 10, узел 11 выбора режима работы, содержащий три элемента И 12, 13, 14, два инвертора 15, 16, три светодиода 17, 18, 19, микроконтроллер 29, исполнительное реле 21. Стволовой концевой выключатель 1 соединен с первым входом микроконтроллера 20, концевой выключатель 2 контроля сцепления барабанов связан со вторым входом микроконтроллера 20, импульсный датчик 3 пути подключен к третьему входу микроконтроллера 20 и ко входу датчика 4 направления движения, который своим выходом соединен с одним из входов узла 6 определения направления движения груза, связанного выходом с четвертым входом микроконтроллера 20. Датчик 5 концевой нагрузки подключен своим цифровым выхо00
го
00
;оо
дом ко второму входу узла 6 определения направления движения груза, а аналоговым выходом - к пятому входу микроконтроллера 20. Переключатель ЛЮДИ - ГРУЗ 9 соединен с первым входом узла 11 выбора режима работы, ко второму входу которого подключен переключатель 10 клеть/скип. Первый, второй и третий выходы узла 11 выбора режима работы связаны соответственно с шестым, седьмым и восьмым входами микроконтроллера 20, который своим выходом соединен с исполнительным реле 21. Каждый из выходов элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 7 является соответствующим входом узла 6 определения направления движения груза, а выход связан со входом инвертора 8, выход которого является выходом узла 6 определения направления движения груза. Первый вход узла 11 выбора режима работы связан со входом инвертора 15 и с одним из входов элемента И 12, второй вход узла 11 выбора режима работы соединен со вторым входом элемента И 21, с одним из входов элемента 13 И и с входом инвертора 16, выход которого подключен к одному из входов элемента И 14. Выход инвертора 15 связан со вторым входом элемента И 13 и вторым входом элемента И 14. Выходы элементов И 12, 13, 14 являются соответственно первым, вторым и третьим выходами узла 11 выбора режима работы, к которым соответственно подключены аноды светодиодов 17, 18, 19, катоды которых соединены с общей шиной узла 11 выбора режима работы.
При Данном способе защита шахтной подъемной установки от превышения скорости на протяжении цикла ее работы осуществляется следующим образом. Информация о пути, проходимом подъемным сосудом, с импульсного датчика 3 пути поступает в микроконтроллер 20. На основании этой информации определяется действительная скорость сосуда. Весь путь, проходимый подъемным сосудом, равный высоте подъема, имеет участки разгона, равномерного хода и замедления. На участках разгона и равномерного хода происходит сравнение действительной скорости сосуда с максимально допустимой скоростью, значение которой хранится в памяти микроконтроллера 20. При превышении действительной скоростью максимально допустимой микроконтроллер 20 подает команду на предохранительное торможение исполнительному реле 21, которое разрывает свой контакт в цепи защиты подъемной установки. На участках замедления аналогично по информации от импульсного датчика 3 пути определяется действительная
скорость. Затем находят оставшийся до крайнего положения подъемного сосуда путь. Далее определяют путь предохранительного торможения при данной действительной скорости. При этом учитывают, что путь предохранительного торможения зависит не только от действительной скорости в начальный момент торможения, но и от следующих факторов: от величины концевой
нагрузки, определяемой датчиком 5 концевой нагрузки, от направления движения груза (спуск груза или подъем груза), определяемого узлом 6 определения направления движения груза, от функций
5 подъемной установки (ЛЮДИ - ГРУЗ, КЛЕТЬ - СКИП), определяющих выходные сигналы узла 11 выбора режима работы. После этого сравнивают оставшийся путь с путем предохранительного торможения.
0 Микроконтроллер 20 подает команду на предохранительное торможение исполнительному реле 21, если оставшийся путь равен или меньше пути предохранительного торможения.
5 Устройство, реализующее предлагаемый способ, работает следующим образом. При движении сосуда импульсный датчик 3 пути посылает путевые импульсы на датчик 4 направления движения, Условно
0 назовем сосуды шахтной подъемной установки левым и правым. Датчик 4 направления движения выдает сигнал логической единицы, если левый сосуд движется вверх, и сигнал логического нуля, если левый сосуд
5 движется вниз. Датчик 5 концевой нагрузки выдает по своему цифровому выходу сигнал 1, если загружен левый сосуд, или сигнал О, если загружен правый сосуд. Сигналы сдатчиков 4 и 5 поступают в узел 6 на элемент
0 ИСКЛЮЧАЮЩЕЕ ИЛИ 7, сигнал которого инвертируется инвертором 8. Входной сигнал инвертора 8, т.е. узла 6 определения направления движения груза, равен единице при подъеме груза, когда левый сосуд
5 загружен и движется вверх или когда правый сосуд загружен, а левый движется вниз, и равен нулю при спуске груза, когда левый сосуд загружен и движется вниз или когда правый сосуд загружен, а левый движется
0 вверх.
Переключатель ЛЮДИ - ГРУЗ 9 выдает сигнал 1 в положении ЛЮДИ и сигнал 0- в положении ГРУЗ. Переключатель КЛЕТЬ - СКИП 10 выдает сигнал 1 в положении
5 КЛЕТЬ и сигнал 0 в положении СКИП. Эти сигналы подаются на входы узла 11 выбора режима работы. Инвертор 15 инвертирует сигнал переключателя 9, а инвертор 16 инвертирует сигнал переключателя 10. На выходе элемента И 12 будет логическая
единица и светодиод 17 будет светиться в режиме ЛЮДИ - КЛЕТЬ, т.е. когда подъемная установка будет выполнять функции людского клетевого подъема. На выходе элемента 13 будет единица и светодиод 18 будет светиться в режиме груз, клеть. В режиме груз, скип единица будет на выходе элемента 14 и будет светиться светодиод 19. Комбинация ЛЮДИ - СКИП является запрещенной, при этом все три выхода узла 11 будут в состоянии 0, а светодиоды 17, 18 и 19 будут погашены.
Путевые импульсы с датчика 3 накапливаются счетчиком микроконтроллера 20, давая информацию о местоположении подъемного сосуда в стволе. С помощью этих же путевых импульсов микроконтроллер 20 вычисляет действительную скорость сосуда. На участках разгона и равномерного хода эта скорость сравнивается с максимально допустимой. Если действительная скорость равна или больше максимально допустимой, то микроконтроллер 20 подает команду на предохранительное торможение исполнительному реле 21, которое разрывает цепь защиты подъемной установки. В памяти микроконтроллера 20 хранится несколько значений максимально допустимой скорости. Микроконтроллер20 опрашивает выходы узла 11 выбора режима работы и, в зависимости от выполняемых подъемной установкой функций, использует конкретное значение максимально допустимой скорости.
В памяти микроконтроллера 20 хранится число, соответствующее точке начала замедления. Когда содержимое счетчика микроконтроллера 20 становится равным этому числу, это означает, что сосуд достиг точки начала замедления и далее начинается участок замедления. На участке замедления микроконтроллер 20 находит путь, оставшийся до крайнего положения сосуда в стволе, определяет путь предохранительного торможения для данной действительной скорости. Для определения пути торможения используются сигналы от узла 6 определения направления движения груза, от узла 11 выбора режима работы, с аналогового выхода датчика 5 концевой нагрузки. Оставшийся путь сравнивается с путем предохранительного торможения. Если оставшийся путь равен или меньше пути предохранительного торможения, микроконтроллер 20 подает команду на предохранительное торможение исполнительному реле 21, которое размыкает свой контакт в цепи защиты.
Стволовой концевой выключатель 1 осуществляет привязку к стволу счетчика путевых импульсов микроконтроллера 20. Концевой выключатель 2 контроля сцепления барабанов производит коррекцию того же счетчика при перестановке барабанов.
Использование предлагаемого способа позволяет снять ограничения, накладываемые заданной или наиболее неблагоприятного случая (спуска груза) тахограммой в применяемых способах, поскольку при новом способе учитываются особенности каждого режима работы подъемной установки, и для каждого режима определяются свои значения пути предохранительного торможения. Это позволяет сократить время движения подъемного сосуда на участках замедления за счет повышения уровня допустимой скорости, что ведет к уменьшению времени цикла, т.е. к увеличению производительности шахтной подъемной установки.
Формула изобретен ия
Способ защиты шахтной подъемной установки от превышения скорости подъема, заключающийся в том, что измеряют путь подъемного сосуда в стволе, определяют
действительную скорость подъемного сосуда на участках разгона и равномерного хода, сравнивают действительную скорость с максимально допустимой скоростью и подают команду на предохранительное торможение, если действительная скорость равна или больше максимально допустимой скорости, отличающийся тем, что, с целью повышения производительности шахтной подъемной установки, на участках замедления вычисляют путь, оставшийся до крайнего положения подъемного сосуда в стволе, задают загрузку подъемных сосудов, измеряют концевую нагрузку, измеряют направ- ление движения подъемного сосуда,
выбирают один из трех режимов работы шахтной подземной установки ЛЮДИ - КЛЕТЬ, ГРУЗ - КЛЕТЬ, ГРУЗ - СКИП и по ним определяют путь предохранительного торможения при данной действительной
скорости в начальный момент торможения, сравнивают оставшийся путь с путем предохранительного торможения и подают команду на предохранительное торможение, если оставшийся путь равен или меньше
пути предохранительного торможения.
|iZ-fiJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ограничения скорости шахтного подъемника и устройство для его осуществления | 1978 |
|
SU753764A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ, КОНТРОЛЯ ДВИЖЕНИЯ И ТЕХНОЛОГИЧЕСКИХ ЗАЩИТ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 2005 |
|
RU2314990C2 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Способ предохранительного торможения шахтного подъемника и устройство для его осуществления | 1978 |
|
SU763229A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Способ защиты шахтной подъемной установки от напуска каната | 1987 |
|
SU1572967A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
Сущность способа защиты шахтной подъемной установки от превышения скорости подъема заключается в том, что измеряют путь подъемного сосуда в стволе, определяют действительную скорость подъема сосуда, на участках разгона и равномерного хода сравнивают действительную скорость с максимально допустимой скоростью и подают команду на предохранительное торможение, если действительная скорость равна или больше максимально допустимой скорости, на участках замедления вычисляют путь оставшийся до крайнего положения подъемного сосуда в стволе, задают загрузку подъемных сосудов, измеряют направление движения подъемного сосуда, выбирают один из трех режимов работы шахтной подземной установки. ЛЮДИ - КЛЕТЬ, ГРУЗ - КЛЕТЬ, ГРУЗ - СКИП, и по ним определяют путь предохранительного торможения при данной действительной скорости в начальный момент торможения сравнивают оставшийся путь с путем предохранительного торможения и подают команду на предохранительное торможение, если оставшийся путь равен или меньше пути предохранительного торможения. 1 ил. Ё
| Hunt O.L | |||
| A Further Review of World Practices In Mine Winding Engines | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
