AV,,,,, У .чь.. NSi ...st;
jQ
х:
СО СО
ГО
о о о
Изобретение относится к сельскому хозяйству, к области механизации трудоемких процессов в животноводстве, и может найти применение на молочных фермах с высокопродуктивным стадом.
Цель изобретения - повышение точности технического состояния системы приготовления и раздачи кормов.
Достигается это тем. что группе животных выдают дозированные порции корма, определяют количество недоеденного животными корма, задают точность раздачи кормов, определяют отношение количества корма, недоеденного,всеми животными группы, к суммарному количеству корма, выданного данной группе животных и при превышении указанным отношением заданной величины, выбираемой с учетом значения точности раздачи и технологических требований оценивают состояние системы приготовления и раздачи корма как требующее особого внимания персонала.
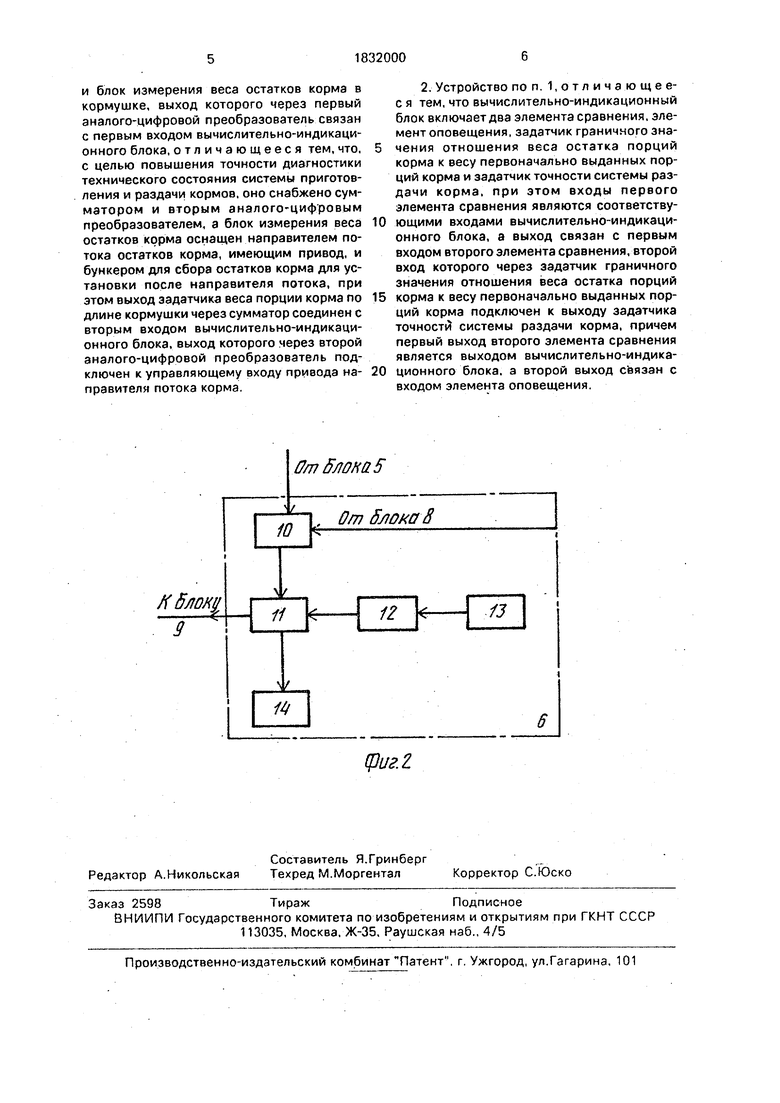
На фиг. 1 изображена схема устройства автоматизированного контроля системы приготовления и раздачи корма; на фиг. 2 - блок-схема вычислительно-индикационного блока.
Устройство включает расположенную в конце кормушки 1 взвешивающую платформу 2 (платформа 2 расположена с того конца кормушки 1, к которому уборщик кормов, не показанный на рисунке, сгребает остатки кормов). В том же конце кормушки 1 установлена управляемая заслонка 3 с приводом 4. Выход платформы 2 через аналого-цифровой преобразователь 5 связан с первым входом вычислительно-индикационного блока 6. Выход задатчика веса 7 порции корма по длине кормушки связан с входом сумматора 8, а выход сумматора 8 - с вторым входом блока 6. Выход блока 6 через цифро-аналоговый преобразователь 9 связан с управляющим входом привода 4.
Вычислительно-индикационный блок 6 включает в себя первый элемент 10 сравнения, входы которого соединены с выходами аналого-цифрового преобразователя 5 и сумматор 8, а выход - с входом второго элемента 11 сравнению. Второй вход элемента 11 связан с выходом задатчика 12 граничного значения отношения, а вход задатчика 12 связан с выходом задатчика 13 точности системы раздачи корма. Первый выход элемента 11 сравнения связан с входом элемента 14 оповещения, а второй выход элемента 11 через цифро-аналоговый преобразователь 9 соединен с управляющим входом привода 4.
Устройство работает следующим образом.
После раздачи кормов животным, обслуживаемым кормушкой 1, в задатчик 7 заносятся весовые данные о распределении порции корма по длине кормушки 1. Этот
задатчик 7 может быть единым для кормораздатчика (системы управления кормораздатчиком) и именно поэтому ему придана такая функция распределения по длине кормушки 1. Данные от задатчика 7 поступают
0 в сумматор 8, и от него уже в виде суммарного сигнала о количестве корма, выданного всем животным в кормушку 1, поступает в вычислительно-индикационный блок 6 (в частности, в элемент 10). После окончания кормления
5 уборщик сгребает остатки недоеденного корма на взвешивающую платформу 2, при этом заслонка 3 остается закрытой, дабы собранные остатки все были взвешены. Когда все остатки собраны на платформе 2, данные об
0 их весе поступают через аналого-цифровой преобразователь 5 в блок 6 (в частности, в элемент 10). Результаты сравнения данных, поступающих от сумматора 8 и преобразователя 5, г. е. частное от давления второго
5 значения на первое, поступают данные о допустимой величине отношения, поступающие от задатчика 12. Они формируются путем суммирования задятчиком 12 требуемой величины, выбранной с учетом техноло0 гических требований (например 5%) и необходимой величины точности раздачи кормов кормораздаточной системы, поступившей из задатчика 13. В зависимости от результатов сравнения величин элемент 11
5 действует двояко. В том случае, если количество оставшихся кормов не выше допустимого, он дает команду на открытие заслонки 3 и остатки кормов могут транспортироваться дальше. В том случае, если количество
0 остатков больше допустимого, элемент 11 запрещает поворот заслонкой 3 (блокирует ее привод 4) и дает сигнал элементу 14, который оповещает оператора о происшедших неполадках,
5 Теперь оператор (или кто-то другой из персонала) может взять пробы оставшихся кормов, что важно для выявления причин недоедания.
Техническое решение разработано в
0 процессе работы над проектами Ферма-автомат будущего ФАБ-800 и Агроносфера- 2000 разрабатываемыми по заданию ГКНТ СССР.
Формула изобретения
5 1. Устройство автоматизированного контроля системы приготовления и раздачи кормов, содержащее задатчик веса порций корма по длине кормушки и установленные последовательно механизм сбора остатков корма из кормушки, снабженный приводом,
и блок измерения веса остатков корма в кормушке, выход которого через первый аналого-цифровой преобразователь связан с первым входом вычислительно-индикационного блока, отличающееся тем, что, с целью повышения точности диагностики технического состояния системы приготовления и раздачи кормов, оно снабжено сумматором и вторым аналого-цифровым преобразователем, а блок измерения веса остатков корма оснащен направителем потока остатков корма, имеющим привод, и бункером для сбора остатков корма для установки после направителя потока, при этом выход эадатчика веса порции корма по длине кормушки через сумматор соединен с вторым входом вычислительно-индикационного блока, выход которого через второй аналого-цифровой преобразователь подключен к управляющему входу привода на- правителя потока корма.
2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что вычислительно-индикационный блок включает два элемента сравнения, элемент оповещения, задатчик граничного значения отношения веса остатка порций корма к весу первоначально выданных порций корма и задатчик точности системы раздачи корма, при этом входы первого элемента сравнения являются соответствующими входами вычислительно-индикационного блока, а выход связан с первым входом второго элемента сравнения, второй вход которого через задатчик граничного значения отношения веса остатка порций корма к весу первоначально выданных порций корма подключен к выходу задатчика точности системы раздачи корма, причем первый выход второго элемента сравнения является выходом вычислительно-индикационного блока, а второй выход связан с входом элемента оповещения.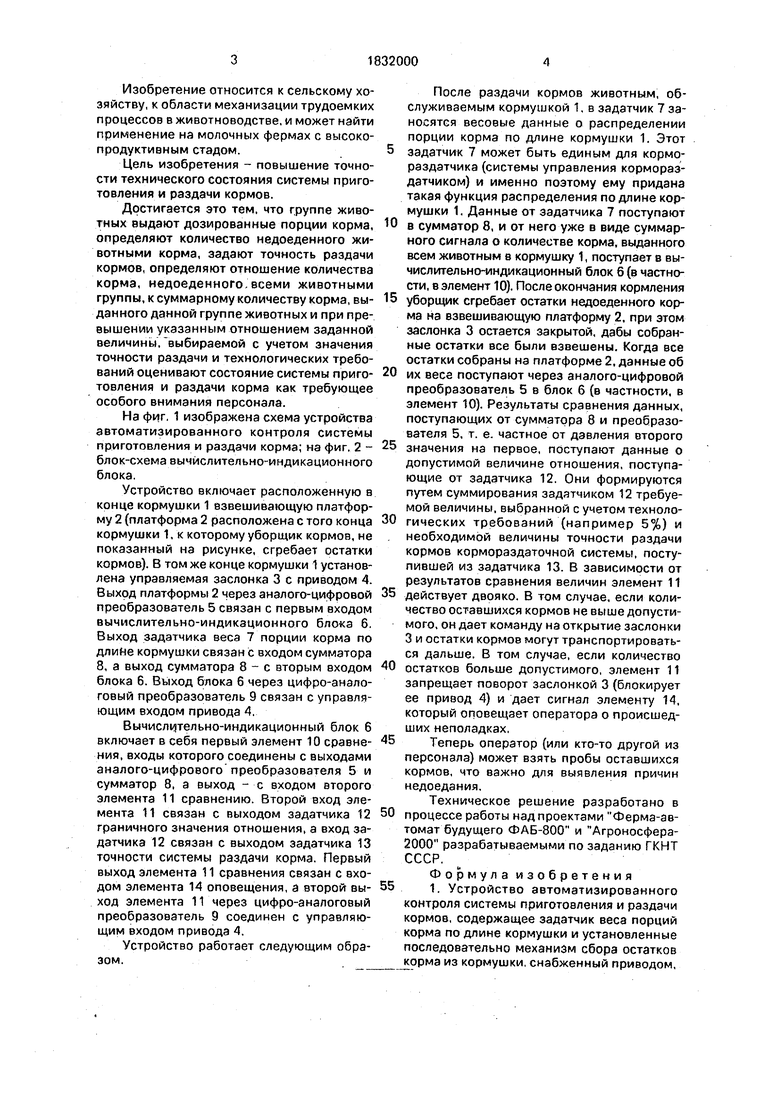
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматизированного контроля системы приготовления и раздачи концентрированных кормов в процессе кормления животных | 1990 |
|
SU1782498A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| Устройство для управления дозатором кормораздатчика | 1986 |
|
SU1355959A1 |
| Устройство для управления кормораздатчиком клеточной батареи | 1980 |
|
SU897185A1 |
| Кормораздатчик | 1984 |
|
SU1259984A1 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| Способ раздачи корма животным и устройство для его осуществления | 1987 |
|
SU1570683A1 |
| Устройство управления кормораздачей | 1976 |
|
SU662049A1 |
| Способ автоматизированного управления системой выпоечных аппаратов и устройство для его осуществления | 1987 |
|
SU1604289A1 |
| Животноводческая ферма | 1989 |
|
SU1727730A1 |
Устройство автоматизированного кон-- троля и системы приготовления подачи кормов. Использование: сельское хозяйство в области механизации трудоемких процессов в животноводстве и может найти применение на молочных фермах с высокопродуктивным стадом. После того, как кормораздатчик выдал корма животным в кормушку 1 и сообщил о весе этих порций задатчику. 7, сумматор 8 направляет в вычислительно- индикаторный блок данные о суммарном количестве кормов. А весоизмерительная платформа 2 после сгребания остатков на нее определяет вес остатков. Вычислительно-индикаторный блок делит вторую величину на первую и в зависимости от того, превышает ли отношение заданное значение этого параметра, выбранное с учетом технологических требований и точности работы кормораздаточного оборудования, либо разрешает, поднимая заслонку 3, дальнейшую выгрузку кормов, например, в бункер, либо оповещает оператора о слишком большом количестве остатков и запирает заслонку 3, запрещая выгрузку остатков, до тех пор, пока не будут взяты пробы кормов для определения причины сбоя в работе системы. 1 з.п. ф-лы, 2 ил. ел с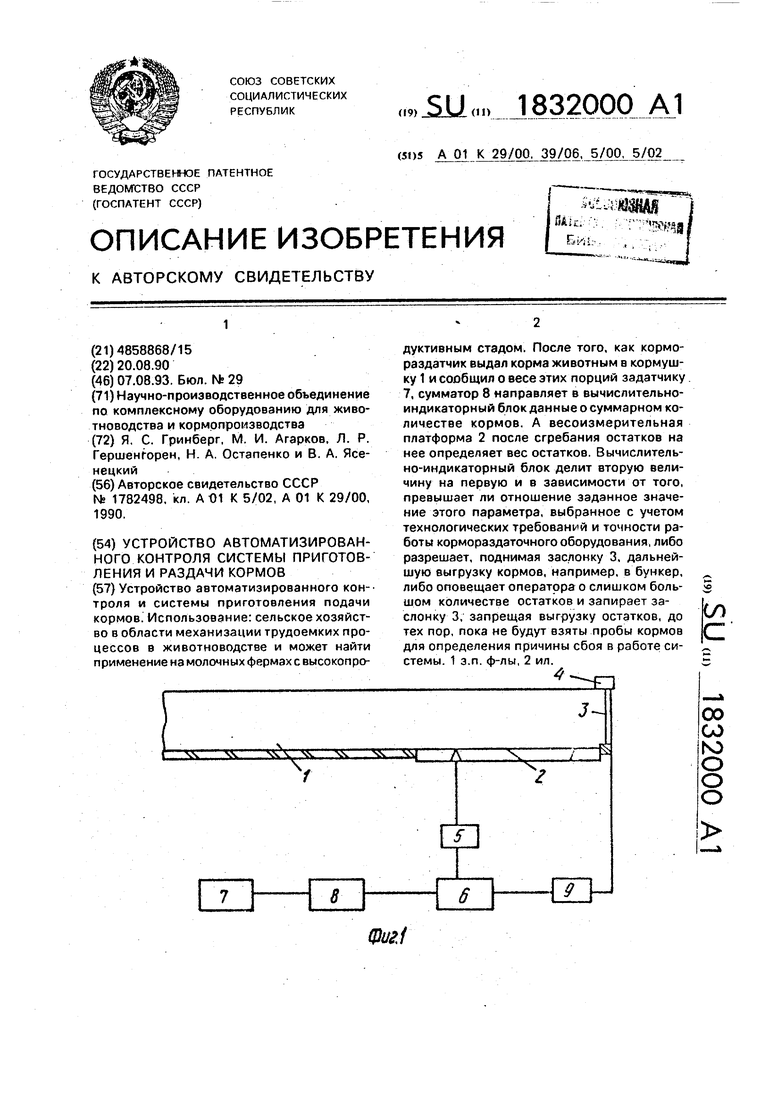
0/т75лока5
10
, От блока 8
К блоку
V
//
г
12
г
13
фиг. Z
| Устройство автоматизированного контроля системы приготовления и раздачи концентрированных кормов в процессе кормления животных | 1990 |
|
SU1782498A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
