Изобретение относится к области автоматического управления электроприводом и может быть использовано, например, на
линии нанесения металлических покрытий, при необходимости перемещения деталей
по позициям и получения точных конечных положений объекта.
Целью изобретения является повышение надежности и расширение функциональных возможностей устройства.
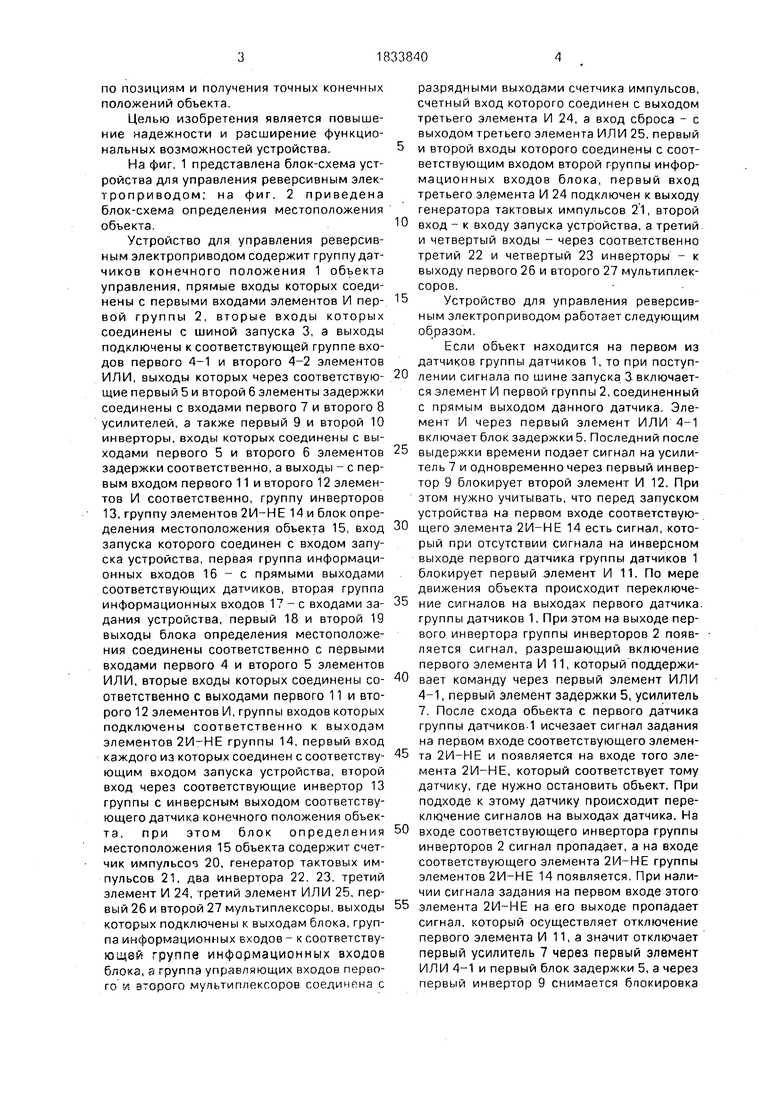
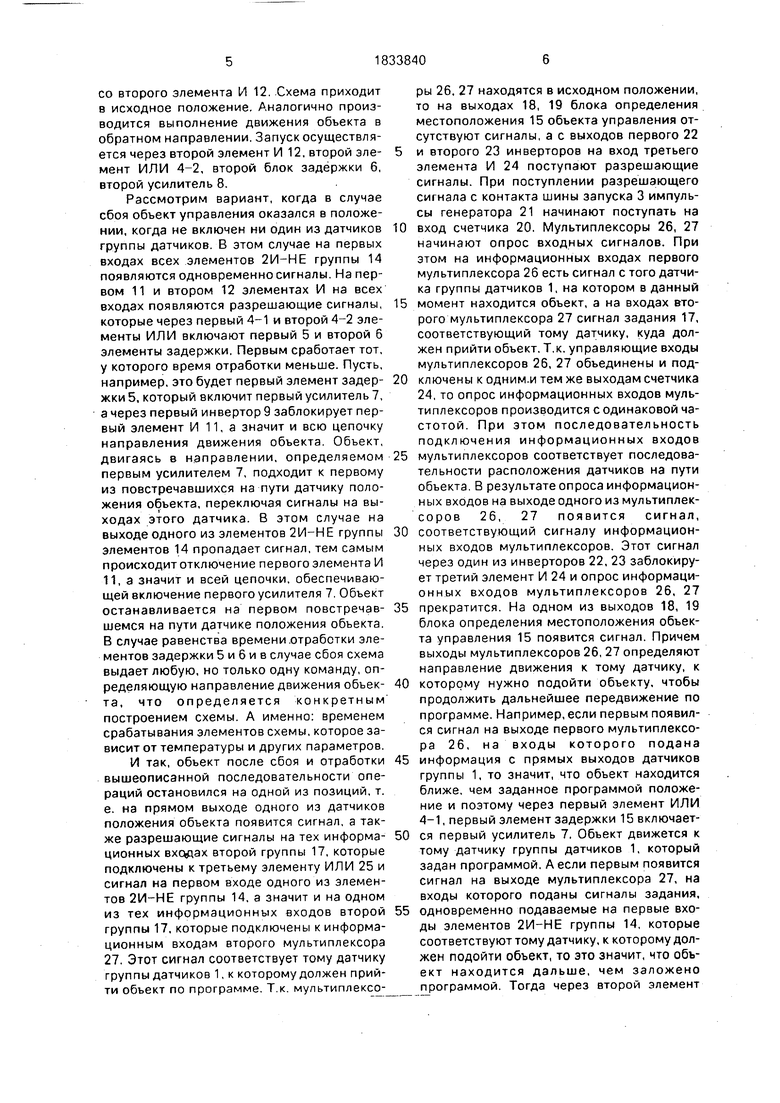
На фиг. 1 представлена блок-схема устройства для управления реверсивным электроприводом; на фиг. 2 приведена блок-схема определения местоположения объекта.
Устройство для управления реверсивным электроприводом содержит группу датчиков конечного положения 1 объекта управления, прямые входы которых соединены с первыми входами элементов И первой группы 2, вторые входы которых соединены с шиной запуска 3, а выходы подключены к соответствующей группе входов первого 4-1 и второго 4-2 элементов ИЛИ, выходы которых через соответствующие первый 5 и второй 6 элементы задержки соединены с входами первого 7 и второго 8 усилителей, а также первый 9 и второй 10 инверторы, входы которых соединены с выходами первого 5 и второго 6 элементов задержки соответственно, а выходы - с первым входом первого 11 и второго 12 элементов И соответственно, группу инверторов 13, группу элементов 2И-НЕ 14 и блок определения местоположения объекта 15, вход запуска которого соединен с входом запуска устройства, первая группа информационных входов 16 - с прямыми выходами соответствующих датчиков, вторая группа информационных входов 17 - с входами задания устройства, первый 18 и второй 19 выходы блока определения местоположения соединены соответственно с первыми входами первого 4 и второго 5 элементов ИЛИ, вторые входы которых соединены соответственно с выходами первого 11 и второго 12 элементов И, группы входов которых подключены соответственно к выходам элементов 2И-НЕ группы 14, первый вход каждого из которых соединен с соответствующим входом запуска устройства, второй вход через соответствующие инвертор 13 группы с инверсным выходом соответствующего датчика конечного положения объекта, при этом блок определения местоположения 15 объекта содержит счетчик импульсоч 20, генератор тактовых импульсов 21, два инвертора 22, 23, третий элемент И 24, третий элемент ИЛИ 25, первый 26 и второй 27 мультиплексоры, выходы которых подключены к выходам блока, группа информационных входов - к соответствующей группе информационных входов блока, а группа управляющих входов первого и второго мультиплексоров соединена с
разрядными выходами счетчика импульсов, счетный вход которого соединен с выходом третьего элемента И 24, а вход сброса - с выходом третьего элемента ИЛИ 25, первый
и второй входы которого соединены с соответствующим входом второй группы информационных входов блока, первый вход третьего элемента И 24 подключен к выходу генератора тактовых импульсов 21, второй
О вход - к входу запуска устройства, а третий и четвертый входы - через соответственно третий 22 и четвертый 23 инверторы - к выходу первого 26 и второго 27 мультиплексоров.
5Устройство для управления реверсивным электроприводом работает следующим образом.
Если объект находится на первом из датчиков группы датчиков 1, то при поступ0 лении сигнала по шине запуска 3. включается элемент И первой группы 2, соединенный с прямым выходом данного датчика. Элемент И через первый элемент ИЛИ 4-1 включает блок задержки 5. Последний после
5 выдержки времени подает сигнал на усилитель 7 и одновременно через первый инвертор 9 блокирует второй элемент И 12. При этом нужно учитывать, что перед запуском устройства на первом входе соответствую0 щего элемента 2И-НЕ 14 есть сигнал, который при отсутствии сигнала на инверсном выходе первого датчика группы датчиков 1 блокирует первый элемент И 11. По мере движения объекта происходит переключе5 ние сигналов на выходах первого датчика, группы датчиков 1. При этом на выходе первого инвертора группы инверторов 2 появляется сигнал, разрешающий включение первого элемента И 11, который поддержи0 вает команду через первый элемент ИЛИ 4-1, первый элемент задержки 5, усилитель 7. После схода объекта с первого датчика группы датчиков.1 исчезает сигнал задания на первом входе соответствующего элемен5 та 2И-НЕ и появляется на входе того элемента 2И-НЕ, который соответствует тому датчику, где нужно остановить объект. При подходе к этому датчику происходит переключение сигналов на выходах датчика. На
0 входе соответствующего инвертора группы инверторов 2 сигнал пропадает, а на входе соответствующего элемента 2И-НЕ группы элементов 2И-НЕ 14 появляется. При наличии сигнала задания на первом входе этого
5 элемента 2И-НЕ на его выходе пропадает сигнал, который осуществляет отключение первого элемента И 11, а значит отключает первый усилитель 7 через первый элемент ИЛИ 4-1 и первый блок задержки 5, а через первый инвертор 9 снимается блокировка
со второго элемента И 12. .Схема приходит в исходное положение. Аналогично производится выполнение движения объекта в обратном направлении. Запуск осуществляется через второй элемент И 12, второй элемент ИЛИ 4-2, второй блок задержки 6, второй усилитель 8.
Рассмотрим вариант, когда в случае сбоя объект управления оказался в положении, когда не включен ни один из датчиков группы датчиков. В этом случае на первых входах всех элементов 2И-НЕ группы 14 появляются одновременно сигналы. На первом 11 и втором 12 элементах И на всех входах появляются разрешающие сигналы, которые через первый 4-1 и второй 4-2 элементы ИЛИ включают первый 5 и второй 6 элементы задержки. Первым сработает тот, у которого время отработки меньше. Пусть, например, это будет первый элемент задержки 5, который включит первый усилитель 7, а через первый инвертор 9 заблокирует первый элемент И 11, а значит и всю цепочку направления движения объекта. Объект, двигаясь в направлении, определяемом первым усилителем 7, подходит к первому из повстречавшихся на пути датчику положения объекта, переключая сигналы на выходах этого датчика. В этом случае на выходе одного из элементов 2И-НЕ группы элементов 14 пропадает сигнал, тем самым происходит отключение первого элемента И 11, а значит и всей цепочки, обеспечивающей включение первого усилителя 7. Объект останавливается на первом повстречавшемся на пути датчике положения объекта. В случае равенства времени.отработки элементов задержки 5 и 6 и в случае сбоя схема выдает любую, но только одну команду, определяющую направление движения обьек- та, что определяется конкретным построением схемы. А именно: временем срабатывания элементов схемы, которое зависит от температуры и других параметров.
И так, объект после сбоя и отработки вышеописанной последовательности операций остановился на одной из позиций, т. е. на прямом выходе одного из датчиков положения объекта появится сигнал, а также разрешающие сигналы на тех информационных входах второй группы 17, которые подключены к третьему элементу ИЛИ 25 и сигнал на первом входе одного из элементов 2И-НЕ группы 14, а значит и на одном из тех информационных входов второй группы 17, которые подключены к информационным входам второго мультиплексора 27. Этот сигнал соответствует тому датчику группы датчиков 1, к которому должен прийти объект по программе. Т.к. мультиплексоры 26, 27 находятся в исходном положении, то на выходах 18, 19 блока определения местоположения 15 объекта управления отсутствуют сигналы, а с выходов первого 22 и второго 23 инверторов на вход третьего элемента И 24 поступают разрешающие сигналы. При поступлении разрешающего сигнала с контакта шины запуска 3 импульсы генератора 21 начинают поступать на
0 вход счетчика 20. Мультиплексоры 26, 27 начинают опрос входных сигналов. При этом на информационных входах первого мультиплексора 26 есть сигнал с того датчика группы датчиков 1, на котором в данный
5 момент находится объект, а на входах второго мультиплексора 27 сигнал задания 17, соответствующий тому датчику, куда должен прийти объект. Т.к. управляющие входы мультиплексоров 26, 27 объединены и под0 ключены к одним.и тем же выходам счетчика 24, то опрос информационных входов мультиплексоров производится с одинаковой частотой. При этом последовательность подключения информационных входов
5 мультиплексоров соответствует последовательности расположения датчиков на пути объекта. В результате опроса информационных входов на выходе одного из мультиплек- соров 26, 27 появится сигнал,
0 соответствующий сигналу информационных входов мультиплексоров. Этот сигнал через один из инверторов 22, 23 заблокирует третий элемент И 24 и опрос информационных входов мультиплексоров 26, 27
5 прекратится. На одном из выходов 18, 19 блока определения местоположения объекта управления 15 появится сигнал. Причем выходы мультиплексоров 26, 27 определяют направление движения к тому датчику, к
0 которому нужно подойти объекту, чтобы продолжить дальнейшее передвижение по программе. Например, если первым появился сигнал на выходе первого мультиплексора 26, на входы которого подана
5 информация с прямых выходов датчиков группы 1, то значит, что объект находится ближе, чем заданное программой положение и поэтому через первый элемент ИЛИ 4-1, первый элемент задержки 15 включает0 ся первый усилитель 7, Объект движется к тому датчику группы датчиков 1, который задан программой. А если первым появится сигнал на выходе мультиплексора 27, на входы которого поданы сигналы задания,
5 одновременно подаваемые на первые входы элементов 2И-НЕ группы 14, которые соответствуют тому датчику, к которому должен подойти объект, то это значит, что объект находится дальше, чем заложено программой. Тогда через второй элемент
ИЛИ 4-2, второй элемент задержки 6, второй усилитель 8 объекту будет задано обратное направление движения. Объект будет двигаться до программно заданного датчика положения объекта управления группы датчиков 1.
При подходе к программно заданному датчику на одном из входов третьего элемента ИЛИ 25, подключенных ко второй группе информационных входов 17 появится сигнал, который осуществит сброс счетчика 20, а значит и приведет схему блока определения местоположения объекта управления в исходное положение.
При этом нужно учитывать, что устройством, формирующим задание, может быть любое программное устройство, работающее по жесткой программе от датчика до датчика, т. е. команда на движение к следующему датчику выдается только после того, как была выполнена предыдущая команда, т. е. команда на движение к предыдущему датчику. При этом команда на движение к датчику не снимается, пока она не будет выполнена.
Таким образом, предлагаемое устройство позволяет исключить вмешательство оператора в его работу, сокращает простои объекта управления из-за сбоев и отказов и тем самым повышает помехозащищенность устройства.
Формула изобретения Устройство для управления реверсивным электроприводом, содержащее группу датчиков конечного положения объекта управления, прямые выходы которых соединены с первыми входами элементов И первой группы, вторые входы которых соединены с шиной запуска устройства, а выходы подключены к соответствующей группе входов первого и второго элементов ИЛИ, выходы которых через соответствующие первый и второй элементы задержки соединены с входами первого и второго усилителей, а также первый и второй инверторы, входы которых соединены с выходами первого и второго элементов задержки соответственно, а выходы - с первым входом первого и второго элементов И соответственно, отличающееся тем, что, с целью расширения области применения, в устройство введены
группа инверторов, группа элементов 2И- НЕ и блок определения местонахождения объекта, вход запуска которого соединен с входом запуска устройства, первая группа информационных входов - с прямыми выходами соответствующих датчиков, вторая группа информационных входов-с входами задания устройства, первый и-второй выходы блока определения местоположения соединены соответственно с первыми
входами первого и второго элементов ИЛИ, вторые входы которых соединены соответственно с выходами первого и второго элементов И, группы входов которых подключены соответственно к выходам элементов 2И-НЕ группы, первый вход каждого из которых соединен с соответствующим входом запуска устройства, второй вход через соответствующий инвертор группы - с инверсным выходом соответствующего датчика конечного положения объекта, при этом блок определения местоположения объекта содержит счетчик импульсов, генератор тактовых импульсов, два инвертора, третий элемент И, третий элемент ИЛИ, первый и второй мультиплексоры, выходы которых подключены к выходам блока, группа информационных входов - к соответствующей группе информационных входов блока, а группа управляющих входов первого и второго мультиплексоров соединена с разрядными выходами счетчика импульсов, счетный вход которого соединен с выходом третьего элемента И, а вход сброса - с выходом третьего элемента ИЛИ, первый и
второй входы которого соединены с соответствующим входом второй группы информационных входов блока, первый вход третьего элемента И подключен к выходу генератора тактовых импульсов, второй
вход - к входу запуска блока, а третий и четвертый входы через соответственно третий и четвертый инверторы - к выходу первого и второго мультиплексоров.
16
№
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для предварительной обработки изображений | 1989 |
|
SU1654849A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |
| Устройство для управления автономным трехфазным двухмостовым инвертором тока | 1987 |
|
SU1561178A1 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВРЕМЕННЫХ СДВИГОВ | 2002 |
|
RU2229157C2 |
| Устройство для ввода дискретной информации | 1986 |
|
SU1425634A1 |
| УСТРОЙСТВО ТЕЛЕСИГНАЛИЗАЦИИ | 1991 |
|
RU2029378C1 |
| Автоматизированная система тестового контроля | 1985 |
|
SU1278857A1 |
| Устройство для функционального контроля интегральных схем | 1988 |
|
SU1737465A1 |
Изобретение относится к технике автоматического управления электроприводом и может быть использовано, например, на линии нанесения металлических покрытий, при необходимости перемещения деталей по позициям и получения точных конечных положений объекта. Цель - расширение функциональных возможностей устройства. Устройство для управления реверсивным электроприводом содержит группу дат- чиков конечного положения объекта управления, прямые входы которых соединены с первыми входами элементов И первой группы, вторые входы которых соединены с шиной запуска устройства, а выходы подключены к соответствующей группе входов первого и второго элементов ИЛИ, выходы которых через соответствующие первый и второй элементы задержки соединены с входами первого и второго усилителей, а также первый и второй инверторы, входы которых соединены с выходами первого и второго элементов задержки соответственно, а выходы - с первым входом первого и второго элементов И. Новым в устройстве является то, что в него введены блок определения местоположения объекта, содержащий первый и второй мультиплексоры, выходы которых соединены с соответствующими входами первого и второго элементов ИЛИ, информационные входы первого из мультиплексоров соединены с прямыми выходами группы датчиков конечного положения объекта управления, информационные входы второго мультиплексора соединены с контактами устройства задания, которые подключены к первым входам группы элементов 2И-НЕ, другие входы которых через соответствующий инвертор, группы инверторов подключены к инверсным выходам группы датчиков конечного положения объекта управления, а выходы группы элементов 2И-НЕ подключены к группе входов первого и второго элементов И, управляющие входы мультиплексоров подключены к выходам счетчика, который одним из входов через третий элемент И подключен к генератору, шине запуска, и другим входом - к третьему элементу ИЛИ, входы которого подключены к второй группе информационных входов, на другие входы третьего элемента И через инверторы подключены выходы мультиплексоров. 2 ил. 00 со со 00 N о
L J ЬН
Фиг. 1
24
20
17
26
18
27
19
| ПРОГРАММНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 0 |
|
SU315160A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ВСЕСОЮЗНАЯ):.:|[НТШ-Т[ХНН4Е | 0 |
|
SU367412A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
