1
Изобретение относится к области автоматического управления подъемно-транспортными машинами и может быть использовано для перемещения по горизонтальным и вертикальным траекториям и получения точных конечных положений объекта управления.
Известны устройства для программного управления подъемно-транспортными машинами, содержащее блок программ, выходы которого связаны с блоком совпадения, блоком горизонтального перемещения и блоком переключения команд, вход блока программ связан с выходом блока переключения команд, выход блока совпадения соединен с входом блока вертикального перемещения.
Однако в таких устройствах осуществление связи блока программ с блоком вертикального перемещения значительно усложняет схему.
Предложенное устройство отличается от известного тем, что выход блока совпадения и вход блока вертикального перемещения подключены к входу блока переключения команд.
Благодаря этому упрощается схема устройства.
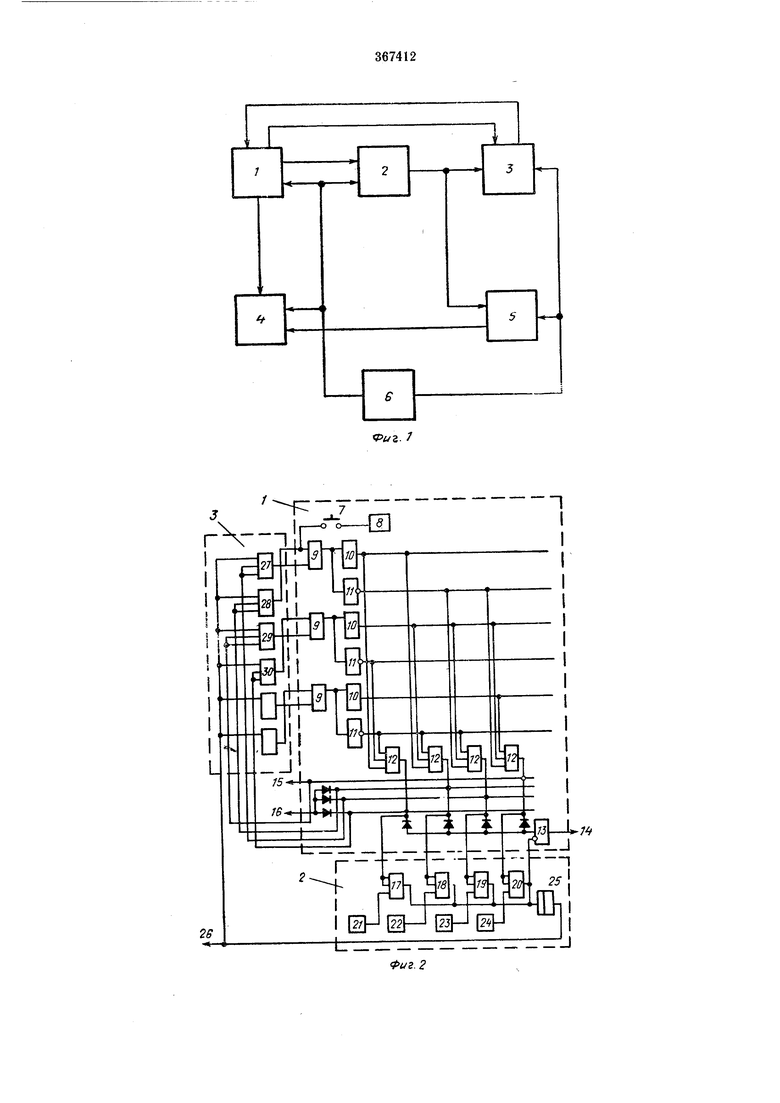
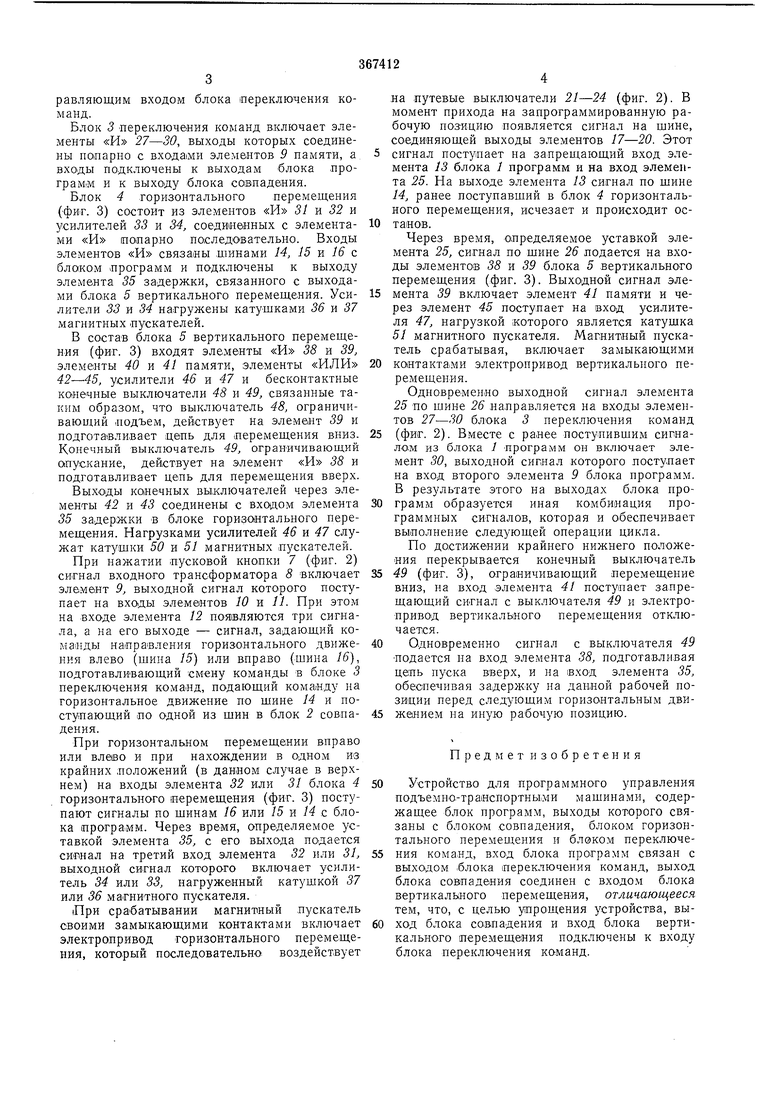
На фиг. 1 показана блок-схема устройства; на фиг. 2 - схема блоков программ, совпадения и переключения ко;манд; иа фиг. 3 - схема блоков горизонтального и вертикального перемещения.
В устройстве блок / программ связан с блоком 2 совпадения, блоком 3 переключения команд и блоком 4 горизонтального перемещения. Блок 5 вертикального перемещения соединен с блоком 2 совпадения и блоком горизонтального перемещения. Питание блоков осуществляется от блока 6 питания.
Блок / программ (фиг. 2) состоит из пусковой кнопки 7, соединяющей входной
трансформатор 8 с одним из входов элементов 9 памяти, к которым подключены элементы «ИЛИ 10, «НЕ и «И 12, обеспечивающие выдачу команды на каждую операцию, и элемента 13 «Запрет на выходе командного сигнала.
Входы блока программ подключены к выхода1М блока 3 переключения команд, причем входы каждого элемента 9 памяти соединены
с двумя выходами блока переключения команд; выходы блока программ связаны с входами блока переключения команд, блока 2 совпадения и по шинам 14, 15 и 16 - с входами блока 4 горизонтального перемещения.
Блок 2 совпадений содержит элементы «И 17-20, подключенные к выходам блока программ и к бесконтактным путевым выключателям 21-24. Выходы элементов «И соединены с элементом 13 блока программ, а через
элемент 25 задержки и шину 26 - с входами блока вертикального перемещения и управляющим входом блока оереключения команд.
Блок 3 переключения команд включает элементы «И 27-30, выходы которых соединены попарно с входами элементов 9 памяти, а входы подключены к выходам блока проrpaMiM и к выходу блока совпадения.
Блок 4 горизонтального перемещения (фиг. 3) состоит из элементов «И 31 w. 32 и усилителей 33 и 34, соединеиных с элементами «И попарно последовательно. Входы элементов «И связаны шинами 14, 15 к 16 с блоком программ и подключены к выходу элемента 35 задержки, связанного с выходами блока 5 вертикального перемещения. Усилители 33 и 34 нагружены катушками 36 и 37 магнитных пускателей.
В состав блока 5 вертикального перемещения (фиг. 3) входят элементы «И 38 и 39, элементы 40 и 41 памяти, элементы «ИЛИ 42-45, усилители 46 -я 47 ii бесконтактные конечные выключатели 48 и 49, связанные таким образом, что выключатель 48, ограничивающий подъем, действует на элемент 39 и подготавливает цепь для перемещения вниз. Конечный выключатель 49, ограничивающий опускание, действует на элемент «И 38 и подготавливает цепь для перемещения вверх.
Выходы конечных выключателей через элементы 42 и 43 соединены с входом элемента 35 задержки в блоке горизонтального перемещения. Нагрузками усилителей 46 и 47 служат катушки 50 и 51 магнитных пускателей.
При нажатии пусковой кнопки 7 (фиг. 2) сигнал входного трансформатора 8 включает элемент 9, выходной сигнал которого поступает на ВХО.ДЫ элементов 10 и /). При этом на входе элемента 12 пояовляются три сигнала, а на его выходе - сигнал, задающий команды направления горизонтального движения влево (щина /5) или вправо (шина 16), подготавливающий смену команды в блоке 3 переключения команд, подающий команду на горизонтальное движение по щине 14 и поступающий по одной из щин в блок 2 совпадения.
При горизонтальном перемещении вправо или влево и при нахождении в одном из крайних положений (в данном случае в верхнем) на входы элемента 32 или 31 блока 4 горизонтального перемещения (фиг. 3) поступают сигналы по щинам 16 или 15 и 14 с блока программ. Через время, определяемое уставкой элемента 35, с его выхода подается сигнал на третий вход элемента 32 или 31, выходной сигнал которого включает усилитель 34 или 33, нагруженный катущкой 37 или 36 магнитного пускателя.
При срабатывании магнитный пускатель своими замыкающими контактами включает электропривод горизонтального перемещения, который последовательно воздействует
на путевые выключатели 21-24 (фиг. 2). В момент прихода на запрограммированную рабочую поз-ицию появляется сигнал на шине, соединяющей выходы элементов 17-20. Этот сигнал поступает на запрещающий вход элемента 13 блока / программ и на вход элемента 25. На выходе элемента 13 сигнал по щине 14, ранее поступавший в блок 4 горизонтального перемещения, исчезает и происходит останов.
Через время, определяемое уставкой элемента 25, сигнал по щине 26 подается на входы элементов 38 и 39 блока 5 вертикального перемещения (фиг. 3). Выходной сигнал элемента 39 включает элемент 41 памяти и через элемент 45 поступает на вход усилителя 47, нагрузкой которого является катушка 51 магнитного пускателя. Магнитный пускатель срабатывая, включает замыкающими
кантакта.ми электропривод вертикального перемещения.
Одновременно выходной сигнал элемента 25 по шине 26 направляется на входы элементов 27-30 блока 3 переключения команд
(фиг. 2). Вместе с ранее поступившим сигналом из блока } программ он включает элемент 30, выходной сигнал которого поступает на вход второго элемента 9 блока программ. В результате этого на выходах блока программ образуется иная комбинация программных сигналов, которая и обеспечивает выполнение следующей операции цикла.
По достижении крайнего нижнего положения перекрывается конечный выключатель
49 (фиг. 3), ограничивающий перемещение вниз, на вход элемента 41 поступает запрещающий сигнал с выключателя 49 и электропривод вертикального перемещения отключается.
Одновременно сигнал с выключателя 49 подается на вход элемента 38, подготавливая цепь пуска вверх, и на вход элемента 35, обеспечивая задержку на данной рабочей позиции перед следующим горизонтальным движанием на иную рабочую позицию.
Предмет изобретения
Устройство для программного управления подъемно-трансиортными машинами, содержащее блок программ, выходы которого связаны с блоком совпадения, блоком горизонтального перемещения и блоком переключекия команд, вход блока программ связан с выходом .блока переключения команд, выход блока совпадения соединен с входом блока вертикального перемещения, отличающееся тем, что, с целью упрощения устройства, выход блока совпадения и вход блока вертикального перемещения подключены к входу блока переключения команд.
ч
I
и
L Т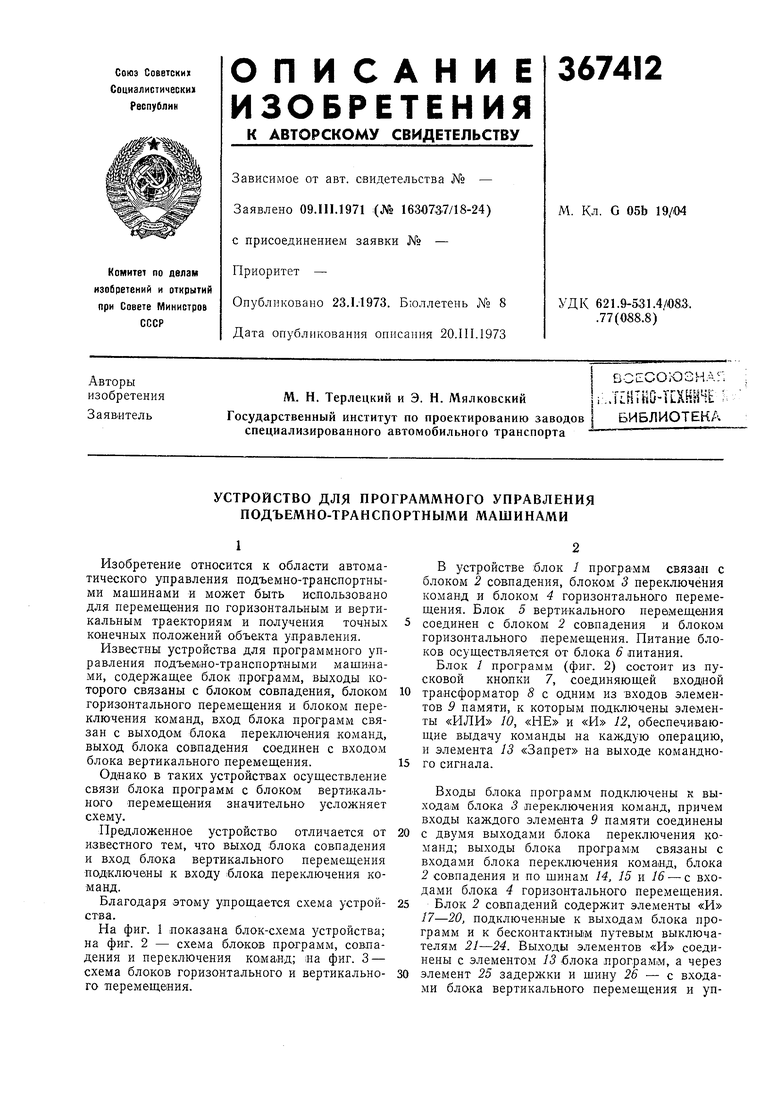
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАБОТКИ ДЕТАЛЕЙ | 1965 |
|
SU224888A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИЛИНИЯМИ | 1972 |
|
SU336648A1 |
| Устройство для управления полуавтоматическими линиями обработки деталей в жидкостях | 1982 |
|
SU1120037A2 |
| Тренажер транспортного средства | 1988 |
|
SU1513502A1 |
| Устройство для дистанционного программного управления электроприводными механизмами | 1984 |
|
SU1226508A1 |
| Установка для ультрафиолетового облучения сельскохозяйственных животных | 1988 |
|
SU1576090A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1972 |
|
SU342171A1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Тестер контроля и диагностики электронных модулей | 1986 |
|
SU1396099A1 |