1 1
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах автоматизированного числового программного .управления координатными перемещениями исполнительных органов, в частности, для установки присоединения проволочных выводов при производстве интегральных микросхем.
Цель изобретения - повышение точности устройства.
На чертеже приведена блок-схема устройства.
Устройство содержит блок 1 команд, дпа канала координат X и У, каждый из которых содержит второй счетчик 2, первый счетчнк 3, блок 4 программ, коммутатор 5, ключ 6, преобразователь 7 кода, второй и первый цифроаналоговые преобразователи 8 и 9, блок 10 сравнения, сумматор 11, -блок 12 компенсации , выполненный в виде потенциометра угловой коррекции, шаговый привод 13, элемент ИЛИ 14, масгатабньи усилитель 15, инвертирующий усилитель 16 и блок 17 коррекции.
Блок пpoгpaм представляет собой стандартный блок оперативного запоминающего устройства (например, 155РУ5 или 541РУ2), в котором хранятся значения координат точек сварки (адресные координаты контактных площадок кристалла и корпуса, интегральной микросхемы (ИМС).
Устройство работает следующим образом.
Перед началом работы устройства в блок 4 программ заносят значение. оординат всех точек сварки кристала (координаты контактных площадок ристалла) относительно базовой точки координатного пространства при условии, что угол поворота кристала равен нулю. Если на позицию сварки пр1адет кристалл, повернутый по глу относительно исходного пространства, то для того, чтобы инструент попадал на контактные площадки рнсталтта, необходимо скорректиро-. вать значения координат, хранящихся в блоке 4. Такая коррекция осуществляется оператором при помощи бло ков компенсации ,12 и коррекции 17.
В исходном состоянии положение . сварочного инструмента совпадает с начальной точкой, относительно котоой заданы координаты точек сварки кристалла и корпуса интегральной
936442
микросхемы. Оператор производит совмещение метки-перекрестия, совпадающей с положением инструмента, с координатами первой точки сварки на
5 кристалле, при этом в счетчик 3
через элемент ИЛИ 14 вводится поправка по координате. Ввод поправки по углу осуществляется при повороте подвижной оптической системы метки0 перекрестия до положения, при котором линии метки становятся параллельными осям симметрии кристалла. Наличие механической связи между оптической системой и потенциометрами
5 (блоки компенсации 12 и коррекции ; 17) угловой коррекции обеспечивает требуемое значение поправки по углу. После введения поправок оператор производит запуск блока 1 команд.
0 Блок 1 команд опрашивает блок 4 программ, которьш выдает значение координат точки сварки на кристалле через преобразователь 7 на вход цифроаналогового преобразователя 9.
5 Напряжение с выхода преобразователя 9 поступает на вход сумматора 11 и блока 12 компенсации каждого канала. С выхода блока 12 канала X снимается сигнал, равный по величине произведению значения координаты X, точки сварки на кристалле, на угол ci(Sin о я:о/для малых углов), соответствующий углу разворота кристалла относительно положения, заданного по программе. Этот сигнал является поправкой к координате ортогонального направления, поэтому он поступает через ключ 6 на вход сумматора 11, где суммируется с аналоговым значением координаты У и, пройдя через усилитель 15 (с коэффициентом передачи 1/2) и инвертирующий усилитель 1б в прямом и инверсном состоянии, поступает на входы блока 17 коррекцни. с выхода блока 17 коррекции
,ft
сигнал, равный произведению , поступает на вход сумматора 11, Ьде суммируется с аналоговым значением координаты X. Сумматор 11 для каждои координаты производит операцию суммирования, соответствующую следующим выражениям:
.у;с.;
X . (1)
,
у .
где. X. и у. - координаты точки в
системе х, у, в которую необходимо вывести инструмент устройства;
х и у , - координаты этой же 1 1
точки .в системе координат (оси данной системы параллельны сторонам кристалла); 0 - угол поворота системы координат относительно х , у системы X, у.
Выражение (1) получены из известных формул преобразования координат: X,- XJ cos об + у- sind; у- у . cos oi- X . sin d (2)
путем замены sin оСй-с/; sin Л (для углов до 10°), и
coso 1 - 2sin2 1 - 2sin х
X sinf 1 - 2f | 1 - с
cos i 1 - - oi.
Поставив полученное значение для cos и выражение (2) получим выражение (1) ,
Таким образом, в соответствии с выражениями (1) операции -у}oi и х .о выполняются при помощи блоков 12 компенсации - |--d и -|-d и блоков
17 коррекции.
Одновременно с командой считывания координат из блока 4 программ происходит запуск привода 13, при этом на его выходе появляются импульсы, которые поступают на вход счетчиков .2 и 3. Коммутатор 5 в этом случае подключает счетчик 2 к преобразователю 8, имеющему на выходе напряжение, соответствующее изменяющейся текущей координате, представ-; ленной в цифровом виде в счетчике 2. В момент совпадения двух напряжений блок 10 сравнения выключает привод 13, констатируя факт выхода инструмента в заданную точку.
Следующей командой блок 1 опрашивает координату корпуса ИМС из блока 4. Процесс отработки происходит так же, как для точки сварки кристалла, только в этом случае ключ 6 отключает блок 12 от сумматора 11 и усилителя 15, а коммутатор 5 подг ключает счетчик 3, в котором находится поправка по линейной координате. Величина перемещения в этом .случае больше или меньше значения,
Q заданного блоком 4, в зависимости от значения поправки по линейной координате. Так как поправка по ли;-:ейным координатам вводится один раз в один из счетчиков, а в дальнейшем
, счетчики 2 и 3 считают импульсы синхронно, то поправка сохраняется в течение всего цикла разварки кристаллов, присутствуя в виде разности между числом импульсов в счетчиках 2 и 3.
0
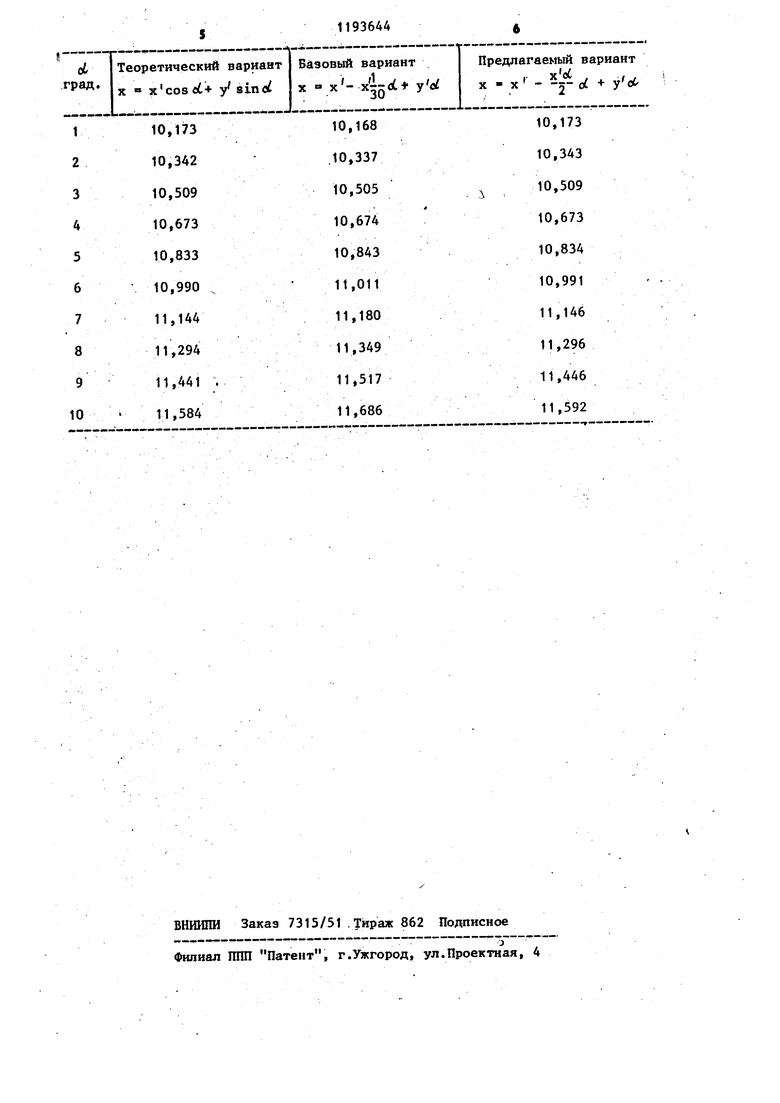
Достоверность достижения цели подтверждается результатами вычислений интегральной микросхемы в предлагаемом устройстве в сравнении с баr зовььм вариантом при изм енении угла поворота кристалла от О до 10°. Размеры кристалла 10x10 мм, т.е. х у 10 мм.
В базовом варианте реализован алгоритм вычислений в соответствии
0
С Быралсением
X X - х грй/+ ус/ .
хи у - адресные координаты кристалла, равные 10 мм.
Из приведенных результатов вычисений видно, что при развороте кристалла на 10° в базовом варианте ошибка в вычислении координат X, У составит 102 мкм в сравнении с теоретическими, а в новом - 8 мкм. При шаге позиционирования 10 мкм ошибка вычисления координат произвольной точки в базовом варианте составит 10.шагов, в новом варианте не. превысит 1 шаг.
Применение изобретения позволяет повысить точность отработки, координат для кристаллов с большими линейными размерами и имеющих большой разворот по углу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881673A2 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881672A2 |
| Двухкоординатное устройство дляпРОгРАММНОгО упРАВлЕНия | 1977 |
|
SU807218A1 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| Вычислительное устройство для управления лучом фазированной антенной решетки | 1991 |
|
SU1829041A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Система для автоматического числового управления координатными перемещениями при обработке изделий микроэлектроники | 1990 |
|
SU1835534A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
ДВУХКООРДИНАТНОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ .по . авт. св. № 807218, отличающееся тем, что, с целью повышегг ния точности устройства, в каждую координату введены масштабный и инвертирующий усилители и блок коррекции, выход масштабного усилителя подключен к входу инвертирующего усилителя и к одному входу блока коррекции, другой вход которого соединен с выходом инвертирующего усилителя , входы масштабных усилителей подключены к выходам ключей соответствующей координаты, а выход блока коррекции одной координаты подсоединен к третьему входу сумматора другой координаты. W С QD СО О 4i 4
| Двухкоординатное устройство дляпРОгРАММНОгО упРАВлЕНия | 1977 |
|
SU807218A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
