1
чы
v
fe
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещения в электрический сигнал | 1987 |
|
SU1425831A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| УСТРОЙСТВО ТЕЛЕМЕТРИЧЕСКОГО ПРИЕМА ЭЛЕКТРОКАРДИОСИГНАЛА | 1995 |
|
RU2106798C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА СО СТАТИЧЕСКИМ АВТОПИЛОТОМ И С ОГРАНИЧЕНИЕМ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2695474C1 |
| Программируемый преобразователь напряжения произвольной формы в напряжение требуемой формы | 1990 |
|
SU1711303A1 |
| Цифровой комбинированный регулятор | 1981 |
|
SU1179298A1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2011 |
|
RU2449470C1 |
| Устройство для цифровой записи-воспроизведения цифровой информации | 1990 |
|
SU1788521A1 |
| Способ определения внешнебаллистических характеристик снарядов и устройство для его осуществления | 2016 |
|
RU2608358C1 |

-
12
00
со
XJ
о со со
Изобретение относится к системам управления и стабилизации углового положения летательных аппаратов и может быть использовано в качестве автопилота вертолета.
Цель изобретения - повышение надежности путем исключения механической сис- хемы механизма согласования и точности управления.
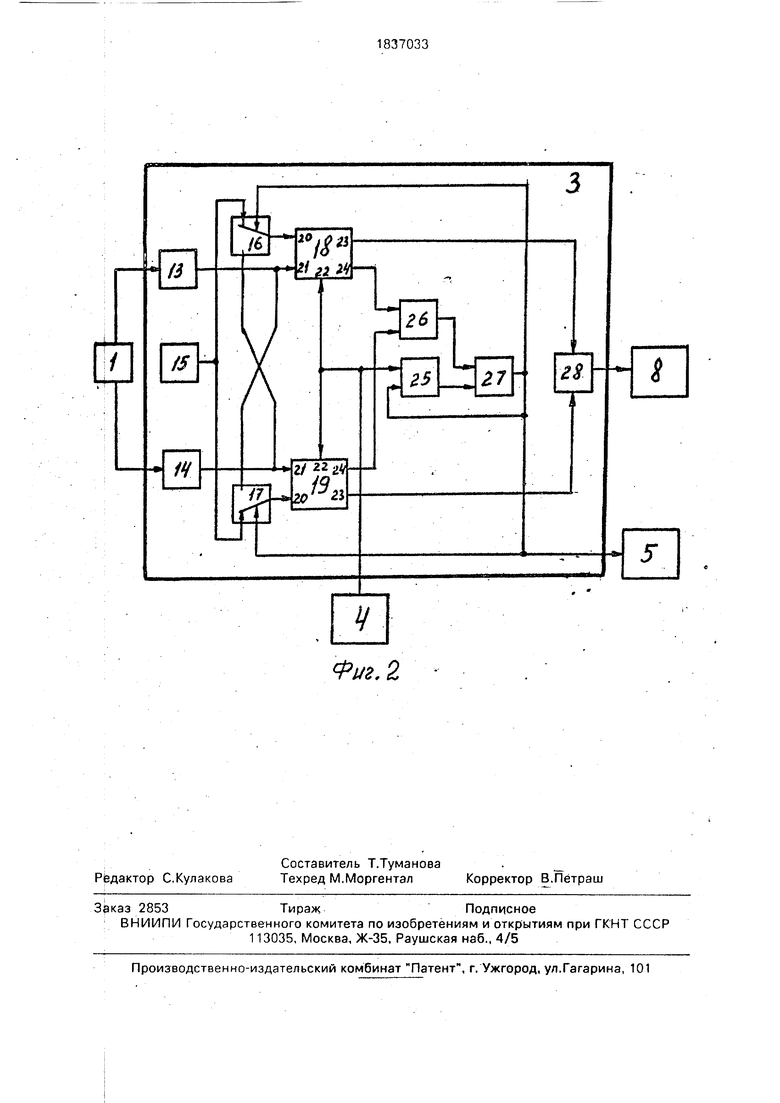
На фиг. 1 представлена структурная схема вертолетного автопилота;на фиг.2 - структурная схема формирователя сигнала угла отклонения объекта.
Вертолетный автопилот (см. фиг. 1) содержит датчик угла отклонения объекта 1, компенсационный датчик 2, формирователь. 3 сигнала угла отклонения объекта, формирователь 4 управляющих импульсов, первый логический элемент И 5, первый ключ б, общая шина 7, устройство выборки и хранения 8, дифференцирующее звено 9, второй 10 ключ, сумматор 11, сервопривод органа управления 12, выход которого является выходом автопилота. Формирователь сигналов угла отклонения объекта 3 (фиг. 2) имеет демодуляторы 13 и 14, источник опорного напряжения 15, первый и второй ключи 16 и 17, первый и второй аналого-цифровые пре- образователи 18 и 19, имеющие опорные входы 20, аналоговые входы 21, входы Запуск 22, аналоговые выходы 23 и выходы Конец преобразования 24, второй и первый логические элементы И 25 и 26, логический элемент ИЛИ 27, сумматор 28.
Автопилот работает следующим обра1 зом.
Датчик угла Т выдает сигнал положения объекта в пространстве в виде двух напряжений переменного тока, модулированного по амплитуде в функции синуса и косинуса угла отклонения. На демподуляторах 13 и 14 производится выпрямление этих сигналов с учетом фазы напряжения питания угла 1. Демодуляторы 13 и 14 представляют собой фазочувствительные выпрямители. Сигналы с демодуляторов 13 и 14 поступают на аналоговые входы 21 соответственно первого 18 и второго 19 аналого-цифровых преобразователей и на замыкающие контакты соот- ветствественно второго 17 и первого 16 ключей. При отсутствии сигнала на управляющем входе ключей 16 и 17 на опорные входы 20 аналого-цифровых преобразователей 18 и 19 поступает опорное напряжение с источника опорного напряжения 15 через замыкающие контакты ключей 16 и 17. Автопилот работает в режимах Управление и Стабилизация. В режиме Управление на втором выходе блока 4 формируются импульсы заданной частоты. С второго выхода формирователя управляющих импульсов 4 последовательность импульсов поступает на входы 22 Запуск аналого-цифровых
преобразователей 18 и 19 и на вход первого логического элемента И 25. С третьего выхода формирователя управляющих импульсов 4 на вход устройства выборки и хранения 8 поступают короткие импульсы, исчезающие
одновременно с импульсами на втором выходе формирователя управляющих импульсов 4, на первом выходе которого в режиме Управление - логический нуль. При поступлении импульса на входы 22 аналогоцифровых преобразователей 18 и 19 (по переднему фронту импульса) начинается процесс преобразования сигналов, поступающих с демодуляторов 13 и 14,пропорционально еоответственно sin a, cos a,
относительно напряжения источника опорного напряжения 15 в цифровую форму и последующим их запоминанием. При этом запоминаются значения s.ln а и cos а, имевшие место в момент окончания преобразования. Поскольку время преобразования. Поскольку время преобразования весьма мало (не более 120 мксек), значения сигналов с демодуляторов 13 и 14 практически не успевают измениться (угол остается прежним), По окончании преобразования с выходов 24 Конец преобразования аналого-цифровых преобразователей 18 и 19 выдаются сигналы в виде импульсов, поступающих на первый и второй входы первого логического элемента И 28. При совпадении этих импульсов на его выходе формируется импульс, который, пройдя логический элемент ИЛИ 27, поступит на второй вход второго логического элемента И 25,
на первом входе которого в это время будет присутствовать .импульс с второго выхода формирователя управляющих импульсов 4. Второй логический элемент И 25 выдает на своем выходе логическую единицу; которая
. заблокирует выход логического элемента ИЛИ 27 в единичном состоянии при исчезновении сигналов с выходов 24 Конец преобразования аналого-цифровыхпреобразователей 18 и 19, Сигнал с выхода
логического элемента ИЛИ 27 произведет переключение ключей 16 и 17. в результате чего опорный вход 20 первого аналого-цифрового преобразователя 18 будет переключен с выхода источника опорного
напряжения 15 на выход демодулятора 14, а опорный вход 20 второго аналого-цифрового преобразователя 19 - с выхода источника опорного напряжения 15 на выход демодулятора 13. С этого момента аналого-цифроэые преобразователи 18,19 будут выполнять Функции умножающего цифро-аналогового преобразователя и на их выходах сформируется сигналы соответственно a cos (а + Да) и CQS a sin (а + Да), где Да - угловое рассогласование. В результате вы- (итания на выходе сумматора 28 сформируется сигнал: sin Да sin a. cds(a + Да)- cos а sin (а +Да), фтот сигнал поступает на информационный Ьход устройства выборки и хранения 8. На управляющий вход устройства выборки и хранения 8 поступит импульс с третьего вывода формирователя управляющих импульсов. Величина приращения сигнала на эыходе сумматора 28 проходит через уст- эойство выборки и хранения 8 и через размыкающие контакты ключа 10 на второй зход сумматора 11 и затем при пропадании импульса на управляющем входе устройства выборки и хранения 8 запоминается до прихода следующего импульса. Первый иход сумматора 11 в это время связан с общей шиной 7. Одновременно пропадает и импульс с выхода второго формирователя управляющих импульсов 4, в результате чего ключи 16 и 17 возвращаются в исходное положение. С приходом нового импульса процесс повторяется. На втором входе Сумматора 11с устройства выборки и хране- 1ря 8 будет формироваться сигнал в виде Некоторой последовательности ступенек в Случае наличия скорости изменения сигналов с датчика угла 1, т.е. угловой скорости вращения объекта. Если скорость вращения рбъекта постоянная, то на втором входе сум- фатора 11 будет поддерживаться один и тот уровень сигнала, поскольку величина |фиращения выходного сигнала за один и же промежуток времени будет постоян- йой. При достаточной частоте замеров вели- ч|ины прираще.ний выходной сигнал V стройства выборки и хранения 8 будет пропорционален угловой скорости объекта, по- с кольку перед каждым замером происходит обнуление сигнала на выходе сумматора 28 и фиксация приращений осуществляется в ли- нейной зоне синусной характеристики. Та- к|им образом, в режиме Управление на в;ход сервопривода 12 поступает сумма сиг- н)алов угловой скорости объекта и компенса- ционного датчика 2. В режиме Стабилизация с первого и второго выходов формирователя управляющих импульсов 4 выдается постоянное напряжение в виде логической единицы, на третьем выходе -.формируется логический нуль. По переднему фронту импульса, поступившего на
вход 22 Запуск обоих аналого-цифровых - преобразователей 18 и 19 при включении режима Стабилизация начинается процесс преобразования и запоминания сигна- 5 лов, аналогично как в режиме Управления. По окончании преобразования с выхода логического элемента ИЛИ 27 на вход логического элемента И 5 поступит сигнал виде логической единицы, на втором входе кото- 10 рого уже будет присутствовать напряжение с первого выхода формирователя управляющих импульсов 4. Сигнал с выхода логического элемента И 5 переключит ключ 6 с общей шины 7 и подключит выход суммато- 15 ра 28 к входу дифференцирующего звена 9 и первому входу сумматора 11. В это же время второй вход сумматора 11 будет отключен от выхода устройства выборки и хра- нения 8 и подключен к выходу 0 дифференцирующего звена 9 с помощью второго ключа, на управляющий вход которого поступит сигнал с первого выхода формирователя управляющих импульсов 4. С этого момента сигнал, пропорциональный 5 sin Да, сформированный на выходе сумматора 28, через замыкающие контакты ключа 6 поступает на первый вход сумматора 1.1, а через дифференцирующее звено 9 и замыкающие контакты ключа 10 - на второй вход 0 сумматора 11. Таким образом, в режиме Стабилизация на вход сервопривода 12 поступает сумма сигналов, пропорциональных отклонению объекта от заданного положения (Да) и угловой скорости (Да) 5 объекта, обеспечивающих стабилизацию углового положения объекта и парирование коротко-периодических возмущений. Сигнал компенсационного датчика 2,поступающий через сумматор 11 на сервопривод.12. обес- ( 0 печивает компенсацию сигнала, пропорци- , опального углу отклонения объекта при вмешательстве пилота в управление. Технические преимущества заявляемого устройства по сравнению с прототипом позволяют 5 повысить надежность автопилота, повысить точность формирования сигнала угловой скорости, что делает возможным улучшить управление объекта.
Формула изобретения 0 1. Вертолетный автопилот, содержащий датчик угла отклонения летательного аппарата, компенсационный датчик, дифференцирующее звено, последовательно соединенные сумматор и сервопривод орга- 5 на управления, отличающийся тем, что, с целью повышения надежности и точности управления, в него дополнительно введены формирователь сигнала угла отклонения летательного аппарата, первый и второй входы которого соединены соответственно с первым и вторым выходами датчика угла отклонения летательного аппарата по сигналам синуса и косинуса угла, и устройство выб.орки и хранения, первый и второй ключи, последовательно соединенные формирователь управляющих импульсов, второй выход которого соединен с третьим входом формирователя сигнала угла откло - нения летательного аппарата, третий выход -е управляющим входом устройства выборки и хранения, и логический элемент И, второй вход которого соединен с вторым выходом формирователя сигнала угла отклонения летательного аппарата, а выход - с управляющим входом первого ключа, первый выход формирователя сигнала угла отклонения летательного аппарата соединен С входом дифференцирующего звена и первым входом сумматора через замыкающие контакты первого ключа, размыкающий контакт которого соединен с общей шиной питания, выход дифференцирующего звена соединен с вторым входом сумматора через замыкающие контакты второго ключа, размыкающий контакт которого соединен с выходом устройства выборки и хранения, а управляющий вход-с первым выходом формирователя управляющих импульсов, выход компенсационного датчика соединен с третьим входом сумматора.
формирователя сигнала угла отклонения летательного аппарата, последовательно соединенных первого логического элемента И и логического элемента ИЛИ, выход которого является вторым выходом формирователя сигнала угла отклонения летательного аппарата, последовательно соединенных второго демодулятора и второго аналого- цифрового преобразователя, выход которого соединен с вторым инверсным входом сумматора, первого и второго ключей, источника опорного напряжения, выход которого соединен с опорными входами первого и второго аналого-цифровых -преобразователей соответственно через размыкающие контакты первого и второго ключей, второго логического элемента И, первый вход которого соединен с входами Запуск первого и второго аналого-цифровых преобразователей и является третьим входом формирователя сигнала- угла отклонения летательного аппарата, второй вход - соединён с выходом логического элемента ИЛИ и управляющими входами первого и второго
ключей, а выход - с вторым входом логического элемента ИЛИ, выход первого демодулятора соединен с замыкающим контактом второго ключа, выход второго демодулятора - с замыкающим контактом первого ключа,
вторые выходы первого и второго аналого- цифровых преобразователей по сигналу Конец преобразования соединены соответственно с первым и вторым входами первого логического элемента И, входы первого
и второго демодуляторов являются соответственно первым и вторым входами формирователя сигнала угла отклонения летательного аппарата. ,
Фиг. 2
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Цель изобретения - повышение надежности путем исключения механической системы механизма согласования и точности управления | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| -ф-лы.,.2 ил. | |||
