Изобретение относится к электроизмерительной технике и может быть использовано в системах дистанционного управления.
Известен двухкоординатный преобразователь угловых перемещений, содержащий корпус, крышку, центральный управляющий стержень, торцевая поверхность которого установлена на универсальном шарнире, четыре катушки индуктивности вихретокового датчика положения, равноудаленные от продольной оси и расположенные под углом 90° одна относительно другой, подпружиненные стаканообразные ползуны с наконечниками, установленные в корпусе концентрично катушкам индуктивности, контактирующие с торцевой поверхностью управляющего стержня (патент РФ №2339908, МПК G01B 7/30, 2006.01).
Недостатком этого устройства является неспособность регулирования отклонений выдаваемых сигналов, обусловленных влиянием допусков при изготовлении деталей конструкции, невозможность объективной точной настройки электрического и механического равновесия и, как следствие, низкая дискретность выдаваемых сигналов и надежность.
Технической задачей изобретения является обеспечение возможности регулирования отклонений выдаваемых сигналов и объективной точной настройки электрического и механического равновесия.
Техническим результатом изобретения является повышение надежности двухкоординатного преобразователя угловых перемещений за счет точной настройки электрического и механического равновесия.
Технический результат достигается тем, что двухкоординатный преобразователь угловых перемещений содержит корпус, закрепленную на корпусе крышку, крестовину, которая совместно с осью, фиксатором и кронштейном составляет карданный шарнир с закрепленной на ней ручкой, в боковые отростки крестовины ввинчены четыре регулировочных винта, с помощью которых устраняются зазоры, связанные с неточностями изготовления деталей, подпружиненные штоки в виде полых ступенчатых гильз, установленные в корпусе соосно четырем катушкам индуктивности, расположенным по окружности на одной панели с шагом 90° и составляющим вихретоковый датчик; резьбовые регулировочные втулки, вкрученные в кронштейн напротив штоков, в нижние торцы которых штоки упираются ступеньками, и предназначенные для регулировки положения штоков относительно катушек индуктивности и выравнивания начального сигнала, получаемого с катушек индуктивности при настройке.
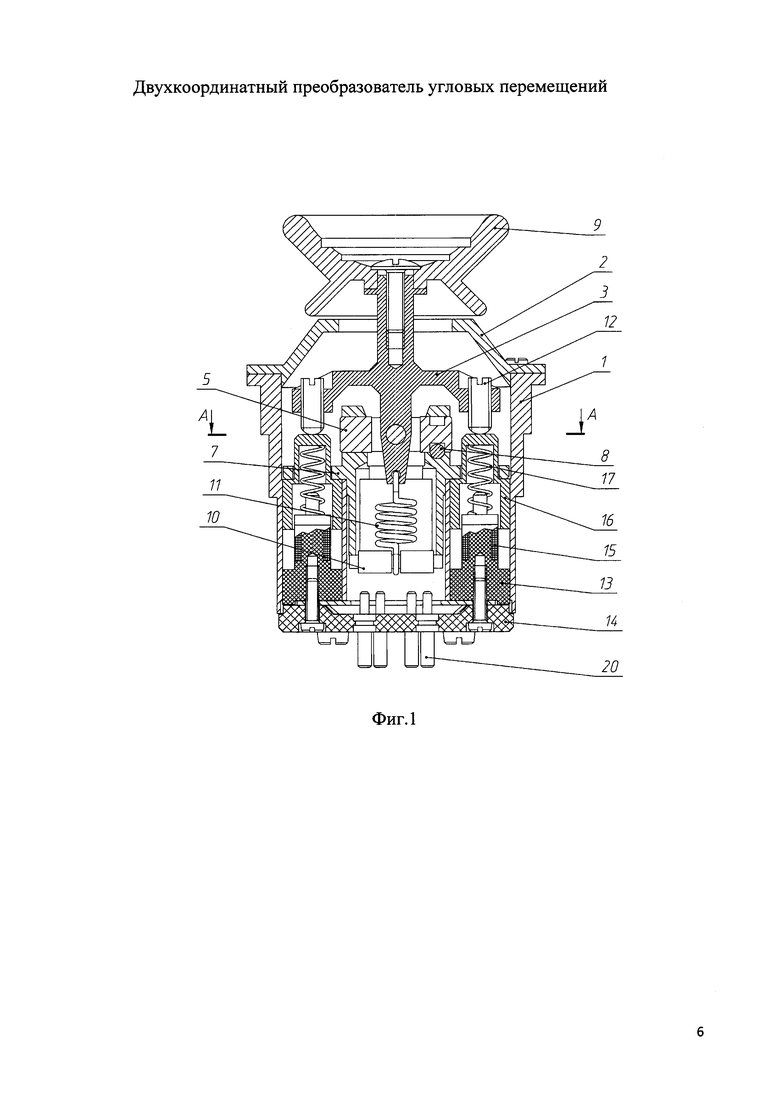
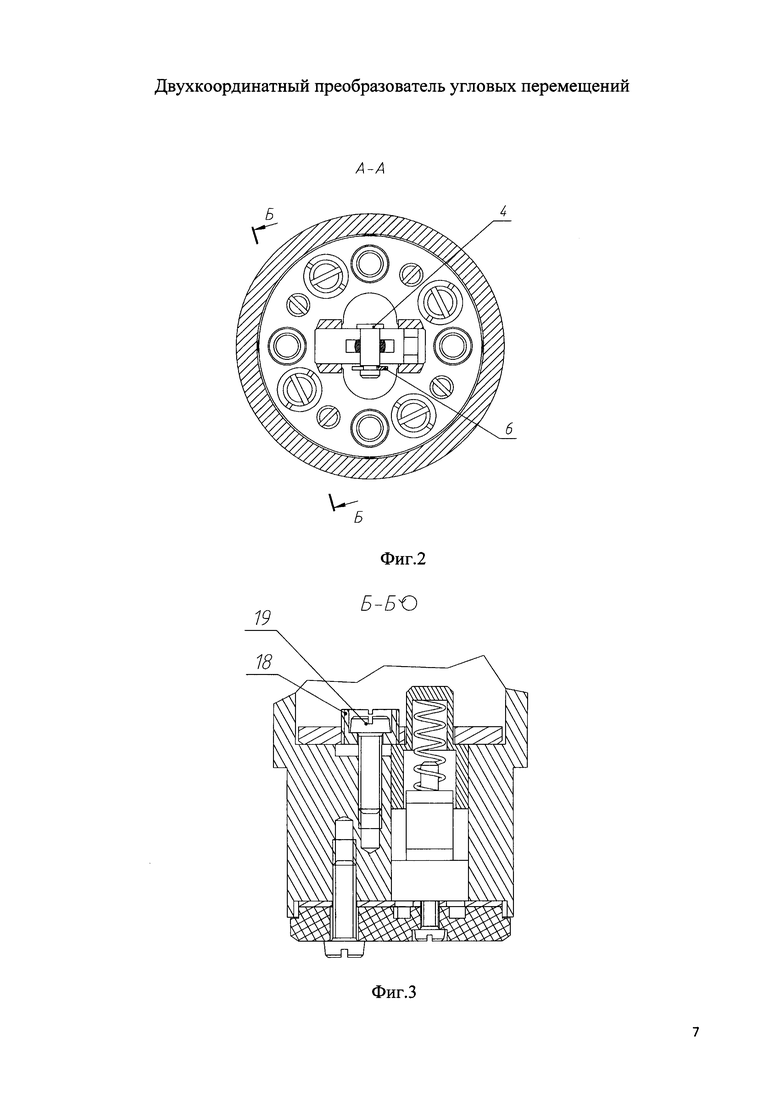
На фиг. 1 показано устройство в сборе, на фиг. 2 - сечение А-А по карданному шарниру, на фиг. 3 - сечение Б-Б по регулировочным втулкам.
Двухкоординатный преобразователь угловых перемещений содержит корпус 1 и крышку 2, ограничивающую своим центральным отверстием угол поворота крестовины 3. На крестовине 3 закреплена ручка 9 для воздействия на нее большого пальца руки оператора. Крестовина 3 выполнена с возможностью вращения на малой оси 4, которая проходит через большую ось 5 и зафиксирована от выпадения быстросъемной шайбой 6. Большая ось 5, в свою очередь, имеет возможность вращения в отверстиях кронштейна 7 и зафиксирована от выпадения поперечным штифтом 8. Детали 3, 4, 5, 6, 7, 8 составляют карданный шарнир, привинченный к корпусу 1. Для приведения карданного шарнира в нейтральное (вертикальное по рисунку) положение между крестовиной 3 и стержнем 10 установлена пружина растяжения 11. В боковые отростки крестовины 3 ввинчены четыре регулировочных винта 12, с помощью которых устраняются зазоры между крестовиной и штоками, связанные с неточностями изготовления деталей. Четыре катушки индуктивности 13, составляющие вихретоковый датчик, установлены по кругу на одной панели 14 с шагом 90°. Катушки индуктивности 13 плотно установлены в отверстиях корпуса 1, что позволяет выдержать равномерный зазор между стенками штоков 16 и катушек. На катушках имеются обмотки 15, предназначенные для формирования сигналов управления. Штоки 16 с помощью пружин 17 упираются ступеньками в нижние торцы резьбовых регулировочных втулок 18, вкрученных в кронштейн 7. Регулировочные втулки после настройки фиксируются винтами 19. Связь обмоток 15 катушек индуктивности 13 с электронным блоком обработки сигнала (на чертежах не показано) осуществляется через разъем 20.
Преобразователь работает следующим образом.
При воздействии большим пальцем руки оператора на ручку 9 отклоняется связанная с ней крестовина 3 и через регулировочные винты 12 осуществляется нажатие на штоки 16, преодолевая сопротивление пружин 11 и 17. Одновременно могут перемещаться только два рядом расположенные штока, так как противоположные им штоки при повороте крестовины 3 теряют контакт с регулировочными винтами 12. По мере движения штока 16 на обмотку 15 катушки индуктивности 13 происходит изменение суммарного сигнала с обмоток пропорционально углу отклонения ручки 9.
После снятия воздействия на ручку 9 пружины 11 и 17 возвращают штоки 16 до упора в регулировочные втулки 18, а крестовину 3 в нейтральное положение и система механически и электрически приходит в исходное состояние.
Таким образом, наличие пружины растяжения 11, регулировочных винтов 12, втулок 18, а также плотной посадки катушек индуктивности 13 в корпусе 1 позволило осуществить регулировку отклонения выдаваемых сигналов и производить объективную точную настройку электрического и механического равновесия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2339908C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2003 |
|
RU2245512C1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1803722A1 |
| Двухкоординатный преобразователь угловых перемещений | 1986 |
|
SU1379608A1 |
Изобретение относится к электроизмерительной технике и может быть использовано в системах дистанционного управления. Двухкоординатный преобразователь угловых перемещений содержит корпус с крышкой, ограничивающей угол поворота крестовины. Крестовина является частью карданного шарнира с закрепленной на ней управляющей ручкой, в боковые отростки которой ввинчены регулировочные винты для контакта со штоками вихретокового датчика. Подпружиненные штоки в виде полой ступенчатой гильзы установлены в корпусе концентрично катушкам индуктивности и упираются ступеньками в нижние торцы резьбовых регулировочных втулок, находящихся в кронштейне. Технический результат – повышение надежности двухкоординатного преобразователя угловых перемещений. 3 ил.
Двухкоординатный преобразователь угловых перемещений, содержащий корпус, закрепленную на корпусе крышку, крестовину, которая совместно с осью, фиксатором и кронштейном составляет карданный шарнир с закрепленной на ней ручкой; подпружиненные штоки в виде полых ступенчатых гильз, установленные в корпусе соосно четырем катушкам индуктивности, расположенным по окружности на одной панели с шагом 90° и составляющим вихретоковый датчик, отличающийся тем, что снабжен резьбовыми регулировочными втулками, вкрученными в кронштейн напротив штоков, в нижние торцы которых штоки упираются ступеньками, и предназначенными для регулировки положения штоков относительно катушек индуктивности и выравнивания начального сигнала, получаемого с катушек индуктивности при настройке, а также четыре регулировочных винта, ввинченных в боковые отростки крестовины, с помощью которых устраняются зазоры между крестовиной и штоками, связанные с неточностями изготовления деталей.
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2339908C1 |
| Двухкоординатный преобразователь угловых перемещений | 1988 |
|
SU1599647A1 |
| Двухкоординатный преобразователь угловых перемещений | 1982 |
|
SU1055959A1 |
| US 4216352 A1, 05.08.1980. | |||

