Предлагаемое изобретение относится к измерительной технике.
Наиболее близким техническим решением к предлагаемому изобретению является акселерометр по а.с. 1839839, состоящий из чувствительного элемента с датчиками смещения и силы и формирователя сигнала обратной связи. В этом акселерометре обеспечивается необходимая минимизация вибропогрешности за счет оптимизации динамических параметров. Недостатком этого акселерометра является относительная малость угла крепления механических ограничителей отклонения подвижной системы чувствительного элемента, что затрудняет обеспечение работоспособности акселерометра при воздействии возможных ударных возмущений.
Целью предлагаемого изобретения является повышение точности и расширение диапазона работоспособности акселерометра при динамических возмущениях.
Поставленная цель достигается тем, что маятниковый компенсационный акселерометр, содержащий чувствительный элемент с фотоэлектрическим датчиком угла и датчиком момента и формирователь сигнала обратной связи, дополнительно снабжен установленным между выходом датчика угла и входом формирователя сигнала обратной связи параллельным частотно-зависимым ограничителем напряжения, например, состоящим из последовательного соединения встречно-параллельно включенных диодов и источников напряжения с конденсатором.
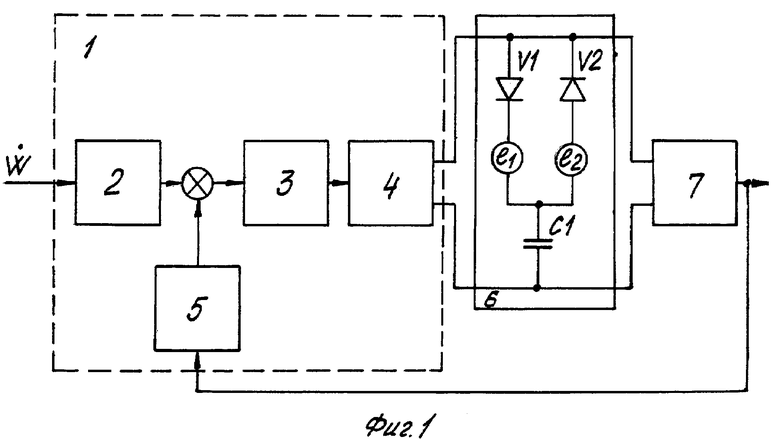
На фиг.1 приведен пример структурной схемы предлагаемого акселерометра.
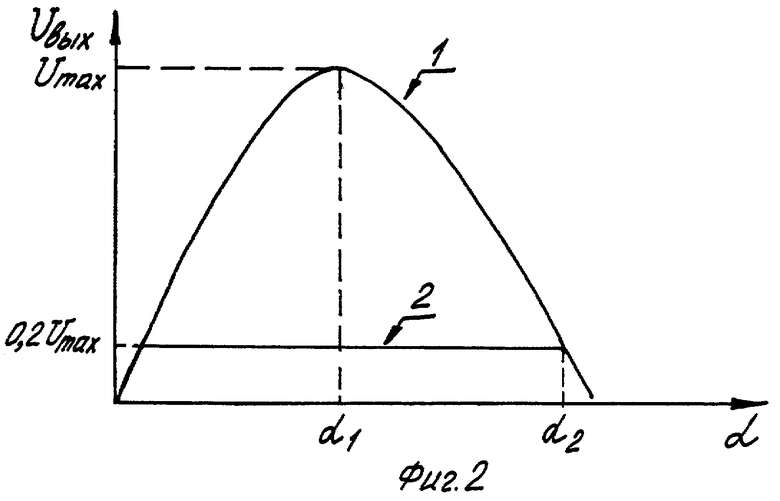
На фиг.2 приведена зависимость выходного напряжения датчика угла от угла отклонения маятника чувствительного элемента (ЧЭ).
Акселерометр содержит:
1 - чувствительный элемент, включающий:
2 - маятник,
3 - подвижную систему,
4 - датчик угла,
5 - датчик момента;
6 - параллельный частотно-зависимый ограничитель напряжения, состоящий из диодов V1 и V2, источников напряжения е1 и е2 и конденсатора С1;
7 - формирователь сигнала обратной связи.
Выход датчика угла 4, подключен к входу ограничителя 6, выход которого включен параллельно входу формирователя 7, выход которого соединен с датчиком момента 5.
Акселерометр работает следующим образом. Приведенная на фиг.2 характеристика характерна для применяемых в современных акселерометрах датчиков угла, выполненных на бифотодиодах, представляющих собой две светочувствительные пластины, изготовленные по единой технологии из одного кристалла полупроводника, расположенные в одном корпусе и отличающиеся высокой стабильностью характеристик. В этом случае механические ограничители (упоры) перемещения подвижной системы 3 устанавливаются при достижении выходного напряжения датчика угла, равным Umax во избежание работы с отрицательной производной по углу (график 1 фиг.2).
Предлагаемое техническое решение предусматривает ограничение выходной характеристики датчика угла на уровне порядка 0,2 Umax (график 2 фиг.2).
При отработке медленноизменяющихся измеряемых управляющих воздействий угол отклонения маятника 2 мал и напряжение на выходе датчика угла не превышает 0,01 Umax.
При воздействии динамических возмущений большой амплитуды сигнал с выхода датчика угла 4 определяется параметрами частотно-зависимого ограничителя 6, которые могут варьироваться за счет выбора типа диодов V1 и V2, напряжения источников е1 и е2 и конденсатора С1. При этом допустимый угол отклонения маятника 2 увеличивается в 1,7-2 раза, что позволяет при величине реализуемого в акселерометре восстанавливающего момента значительно увеличить диапазон отрабатываемых ударных возмущений или при определенных параметрах ударного воздействия уменьшить величину максимального реализуемого восстанавливающего момента. Действительно, выражение для угла отклонения маятника 2 при действии импульсного возмущения с амплитудой, превышающей диапазон линейности акселерометра, имеет вид:

где
 , τu - механический момент от импульсного возмущения и его длительность,
, τu - механический момент от импульсного возмущения и его длительность,
Mb - восстанавливающий момент обратной связи;
Trэ, Kg - постоянная времени и коэффициент демпфирования чувствительного элемента.
Приведенное выражение определяет связь угла отклонения маятника 2 от параметров ударного воздействия и величины восстанавливающего момента датчика момента 5.
Конденсатор С1 определяет частотную зависимость параметров ограничителя 6, что необходимо в связи с обратно пропорциональной зависимостью длительности ударных возмущений от их амплитуды, а также обеспечивает требуемые динамические параметры акселерометра при воздействии динамических возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ КОМПЕНСАЦИОННЫМ АКСЕЛЕРОМЕТРОМ | 1979 |
|
SU1839854A1 |
| Компенсационный акселерометр | 1974 |
|
SU1839839A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1983 |
|
SU1840734A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839835A1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1979 |
|
SU1839834A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1978 |
|
SU1839853A1 |
| Способ определения нестационарных углов тангажа и крена и устройство для его реализации | 2022 |
|
RU2780360C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
Изобретение относится к измерительной технике. Сущность: акселерометр содержит чувствительный элемент с маятником, датчиком угла и датчиком момента. Формирователь сигнала обратной связи включен между датчиком угла и датчиком момента. Кроме того, датчик содержит параллельный частотно-зависимый ограничитель напряжения, установленный между выходом датчика угла и входом формирователя сигнала обратной связи. Указанный датчик может быть выполнен из встречно-параллельно включенных диодов, с каждым из которых последовательно включен источник опорного напряжения, и конденсатора, соединенного последовательно с источниками опорного напряжения. Технический результат: повышение точности и расширение диапазона работоспособности акселерометра при динамических возмущениях. 2 ил.