Предлагаемое изобретение относится к измерительной технике, конкретно к измерениям параметров движения летательных аппаратов.
Измерение линейных ускорений маятниковым компенсационным акселерометром широко используется в системах управления (см., например ″Инерциальные навигационные системы″ И.А.Горенштейн, И.А.Шульман, изд-во "Машиностроение" 1970 г. стр.99-115).
Известен способ измерения линейных ускорений маятниковым компенсационным акселерометром, описанный в научно-техническом сборнике "Труды НИИАП", вып.2, 1967 г. Недостатками способа является невозможность совместить при его реализации высокую помехозащищенность и точность измерения линейных ускорений в условиях воздействия динамических возмущений.
Наиболее близким техническим решением к заявляемому является способ по авт. св. 1839872, где повышение точности достигается подачей в цепь обратной связи маятникового акселерометра сигнала с вибродатчика, амплитуду которого изменяют в зависимости от угла отклонения маятника и угла сдвига фаз сигнала основного канала и сигнала вибродатчика, предварительно пропущенного через апериодическое звено. Реализация этого способа позволяет удовлетворить современные требования к помехозащищенности и точности измерения линейного ускорения в условиях динамических возмущений. Недостатком способа по авт. св. 1839872 является необходимость наличия дополнительного канала измерения ускорения, увеличение габаритов и количества связей в командных приборах системы управления.
Целью предлагаемого изобретения является повышение точности измерения линейных ускорений маятниковым компенсационным акселерометром в условиях воздействия динамических возмущений. Эта цель достигается тем, что в способе измерения линейных ускорений маятниковым компенсационным акселерометром, состоящим из чувствительного элемента и электронного формирователя сигнала обратной связи, динамический коэффициент передачи последнего автоматически изменяют пропорционально сумме амплитуды динамических возмущений и величины измеряемого линейного ускорений.
На чертеже приведен пример структурной реализации предлагаемого способа.
Здесь:
1 - чувствительный элемент, включающий:
2 - маятник,
3 - подвижную систему с датчиком угла,
4 - датчик момента;
5 - электронный формирователь сигнала обратной связи;
6 - формирователь сигнала, пропорционального амплитуде динамических возмущений;
7 - формирователь сигнала, пропорционального величине измеряемого линейного ускорения;
8 - сумматор сигналов с выхода формирователей 6 и 7;
9 - устройство изменения динамического коэффициента передачи формирователя 5.
Выход датчика угла 3 подключен ко входу формирователя сигнала обратной связи 5, выход которого соединен с датчиком момента 4. К выходу формирователя 5 подключены формирователи сигналов, пропорциональных амплитуде динамических возмущений 6 и величине измеряемого линейного ускорения 7, выходы которых подключены ко входам сумматора 8. Выход сумматора 8 подключен к устройству изменения динамического коэффициента 9 формирователя 5. Устройство 9 включено в обратную связь формирователя 5.
Предлагаемый способ предусматривает проведение следующих операций:
1. Формируют сигнал, пропорциональный амплитуде действующих динамических возмущений.
2. Формируют сигнал, пропорциональный величине измеряемого линейного ускорения.
3. Суммируют оба сформированных сигнала.
4. Подают суммарный сигнал в устройство, автоматически изменяющий глубину обратной связи формирователя сигнала обратной связи, тем самым изменяющее его динамический коэффициент передачи.
Сущность предлагаемого способа заключается в возможности реализации относительно малого динамического коэффициента передачи акселерометра при отсутствии динамических возмущений, что необходимо для обеспечения заданной точности его предстартовой калибровки. В то же время, при воздействии динамических возмущений на активном участке динамический коэффициент передачи повышается до величины, необходимой для уменьшения вибропогрешности и увеличения быстродействия акселерометра при воздействии ударных возмущений. Использование сигнала, пропорционального величине измеряемого линейного ускорения, не оказывая практического влияния на точность предстартовой калибровки акселерометра, значительно повышает эффективность управления динамическим коэффициентом передачи акселерометра на активном участке полета.
Проверка предлагаемого способа показала, что его применение по сравнению с известными способами снижает погрешность измерения ускорения в условиях вибрационных возмущений в 1,5÷2 раза, а также расширяет диапазон достоверных измерений ускорений при воздействии ударных возмущений с амплитудами до 100g. При этом подобный эффект достигается относительно простыми техническими средствами - без существенного увеличения габаритов и веса акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1979 |
|
SU1839840A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ ПРОПОРЦИОНАЛЬНОСТИ МАЯТНИКОВОГО ДИСКРЕТНОГО АКСЕЛЕРОМЕТРА | 1984 |
|
SU1839865A1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1969 |
|
SU1839872A1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| Способ определения нестационарных углов тангажа и крена и устройство для его реализации | 2022 |
|
RU2780360C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1983 |
|
SU1840734A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1974 |
|
SU1839856A1 |
Изобретение относится к измерительной технике, конкретно к измерениям параметров движения летательных аппаратов. Сущность: измерение ускорения компенсационным акселерометром осуществляется путем автоматического изменения динамического коэффициента обратной связи. При этом изменение осуществляют пропорционально сумме величин измеряемого ускорения и динамических возмущений. Технический результат: повышение точности и расширение диапазона измерений. 1 ил.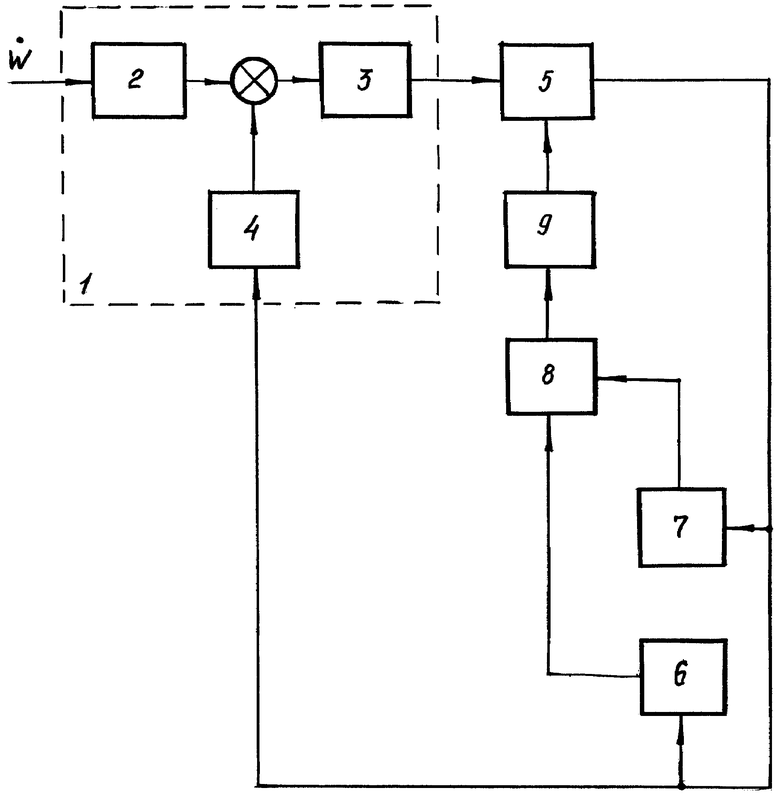
Способ измерения ускорения компенсационным акселерометром путем автоматического изменения динамического коэффициента обратной связи, отличающийся тем, что, с целью повышения точности и расширения диапазона измерения, изменяют динамический коэффициент обратной связи пропорционально сумме величин измеряемого ускорения и динамических возмущений.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авт | |||
| св | |||
| Способ повышения виброустойчивости акселерометра | 1967 |
|
SU1839937A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1969 |
|
SU1839872A1 |

