Изобретение относится к области гироскопического приборостроения и может найти широкое применение для измерения угловой скорости уходов гиростабилизаторов головок самонаведения ракет "воздух-воздух" и других сложных гироскопических устройств.
Основными величинами, характеризующими точность гироскопического стабилизатора при действии возмущений, возникающих в условиях эксплуатации (вибрация и др.), являются динамическая ошибка и уходы гироплатформы.
Вычисление уходов гироплатформы гиростабилизатора производится по формуле:

где Δα - уход гироплатформы (отклонение от первоначального положения);
ω(t) - угловая скорость ухода гиростабилизатора относительно инерциальной системы;
α0 - значение угла α в момент времени t=0.
Следует отметить, что на величину ухода гиростабилизатора существенное влияние оказывают инструментальные погрешности (сухое трение в осях прецессии гироскопов и стабилизированных рам, люфты, упругость элементов подвеса и др.), носящие случайный характер. В связи с этим величина ухода гироплатформы носит также случайный характер, что вызывает необходимость измерения этой величины на каждом приборе и соблюдения условий, при которых измеренная величина не превышала бы заданной.
На предприятиях-изготовителях гиростабилизаторов предусмотрено измерение уходов, при котором фиксируется первоначальное значение угла (α0) в момент времени t0, по истечению заданного промежутка времени, до момента t1 вновь фиксируется значение угла (α1), затем вычисляют уход гироплатформы по формуле:

Промежуток времени, в течение которого производится замер, практически составляет от трех до пяти минут.
Существенными недостатками применяемых в настоящее время устройств для измерения уходов гироплатформы является невозможность произвести оценку истинной скорости ухода в любой момент времени, при любых фиксированных положениях рам гиростабилизатора.
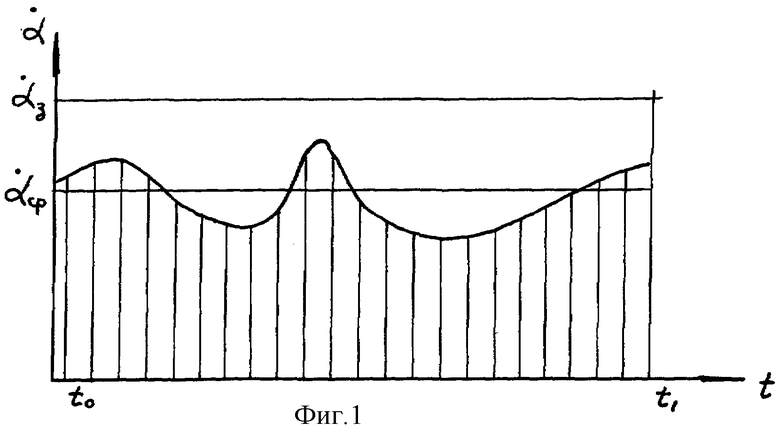
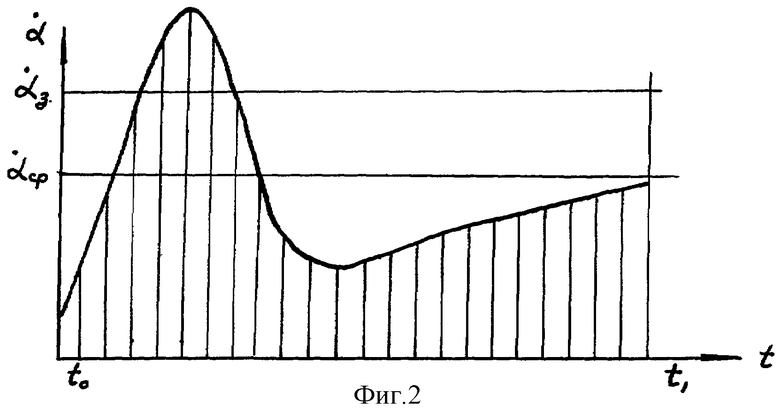
На фиг.1, 2 приведена зависимость скорости ухода от времени (для двух приборов) часто встречающаяся в гиростабилизаторах.
Площадь, ограниченная кривой α за промежуток времени t1-t0 и осью абсцисс, есть величина ухода, определяемая выражением (1), которому соответствует средняя скорость ухода  .
.
Из фиг.1 видно, что возможен случай, когда величина ухода гироплатформы или соответствующая ему величина средней скорости ухода не превосходит заданной величины. Однако из фиг.2 видно, что скорость ухода гироплатформы в некоторые моменты времени, заключенные в интервале [t1, t0] недопустимо превышает заданную величину  . Приборы, имеющие зависимости скорости ухода гироплатформы от времени, изображенные на фиг.2, в соответствии с существующим измерением точности во величине ухода, также будут удовлетворять заданным требованиям.
. Приборы, имеющие зависимости скорости ухода гироплатформы от времени, изображенные на фиг.2, в соответствии с существующим измерением точности во величине ухода, также будут удовлетворять заданным требованиям.
Но из физических соображений ясно, что приборы с характеристиками, приведенными на фиг.1 предпочтительней приборов, характеристика которых приведена на фиг.2.
Следует также отметить, что величина скорости уходов в значительной степени зависит от углов поворота рам гиростабилизатора.
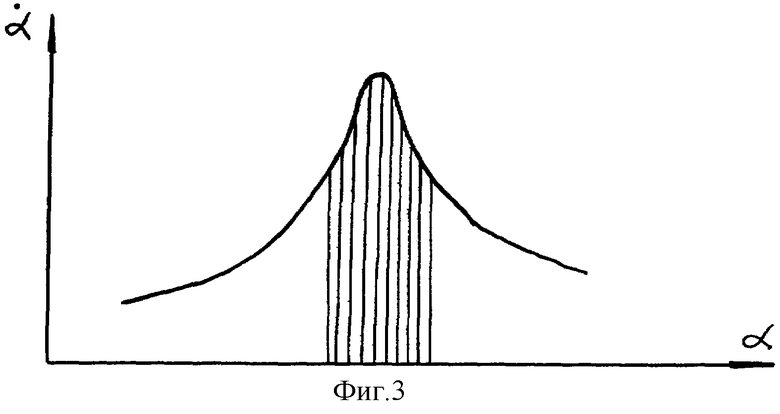
На фиг.3 приведены характерные зависимости скорости уходов гироплатформы от угла поворота стабилизированной рамы.
Нетрудно видеть, что повышенная скорость уходов в заштрихованной области, обусловленная механическими резонансами и повышенным трением, на существующих измерительных устройствах не может быть обнаружена ввиду быстрого прохождения указанной области.
Предлагаемое устройство позволяет измерять точность работы гиростабилизатора по величине скорости ухода гироплатформы, что дает возможность производить отбор приборов с предпочтительными точностными характеристиками и производить измерение истинной скорости ухода при любых углах отклонения рам гиростабилизатора.
Ниже предложено устройство для измерения угловой скорости ухода гироплатформы.
Рассмотрим применение предлагаемого устройства применительно в серийно изготавливаемому двухосному силовому гиростабилизатору ДГ-102А кинематическая схема которого приведена на фиг.4.
В приведенной схеме приняты следующие обозначения:
ГУ - гироузел;
ИД1, ИД2 - индукционные датчики угла прецессии соответственно по осям 1 и 2;
МД1, МД-2 - моментные датчики соответственно по осям 1 и 2;
П1, П2 - потенциометрические датчики углового положения стабилизированных рам соответственно по осям 1 и 2;
РП1, РП2 - разгрузочные привода соответственно по осям 1 и 2;
СР1, СР2 - струйные реле, управляющие приводами разгрузки по осям 1 и 2;
У1, У2 - усилители приводов разгрузки соответственно по осям 1 и 2;
УМД1, УМД2 - усилители моментных датчиков соответственно по осям 1 и 2.
Выходной координатой гиростабилизатора является угол поворота гироплатформы α(β). Изменение α(β) во времени характеризует величину ухода гироплатформы. Подадим сигнал в виде напряжения постоянного тока с датчика угла П1(П2) отклонения стабилизированной рамы на моментный датчик, вызывающий прецессионное движение гироплатформы вокруг оси, относительно которой произошло отклонение. Таким образом, чтобы при отклонении гироплатформы по часовой (против часовой) стрелке моментный датчик вызывал отклонение гироплатформы против часовой (по часовой) стрелке. Величина тока, протекающего в цепи моментного датчика, при этом, будет пропорциональна скорости отклонения гироплатформы.

Таким образом, по току в цепи моментного датчика можно судить о величине скорости ухода гироплатформы от стабилизированного заданного направления. При измерениях стабилизированное направление задается введением поправки в величину сигнала с датчика угла, например, с помощью задающего датчика ϕ1(ϕ2).
Для определения максимальной скорости ухода гироплатформы за время полета и облегчения замера величины тока в цепи моментного датчика в предлагаемом устройстве перед измерительным прибором ИП включен RC фильтр с постоянной времени 5÷10 сек.
Предлагаемое устройство включает в себя усилитель, вход которого подключен к датчику угла гироплатформы и задающему датчику, а выход подключен к датчику момента и RC фильтру с заданной постоянной времени.
Предлагаемое устройство может быть применено для контроля широкого класса сложных гироскопических приборов, содержащих коррекционные двигатели.
Изобретение относится к области гироскопического приборостроения и может найти широкое применение для измерения угловой скорости уходов гиростабилизаторов головок самонаведения ракет «воздух-воздух» и других сложных гироскопических устройств. Сущность: устройство содержит гироскоп, задающий датчик и измерительный прибор. При этом, гироскоп установлен на стабилизированной платформе с датчиком угла положения по оси подвеса. Выход датчика угла через усилитель подключен к датчику момента гироскопа. Кроме того, выход усилителя соединен с измерительным прибором через фильтр, а второй вход усилителя подключен к задающему датчику. Технический результат: повышение точности работы. 4 ил.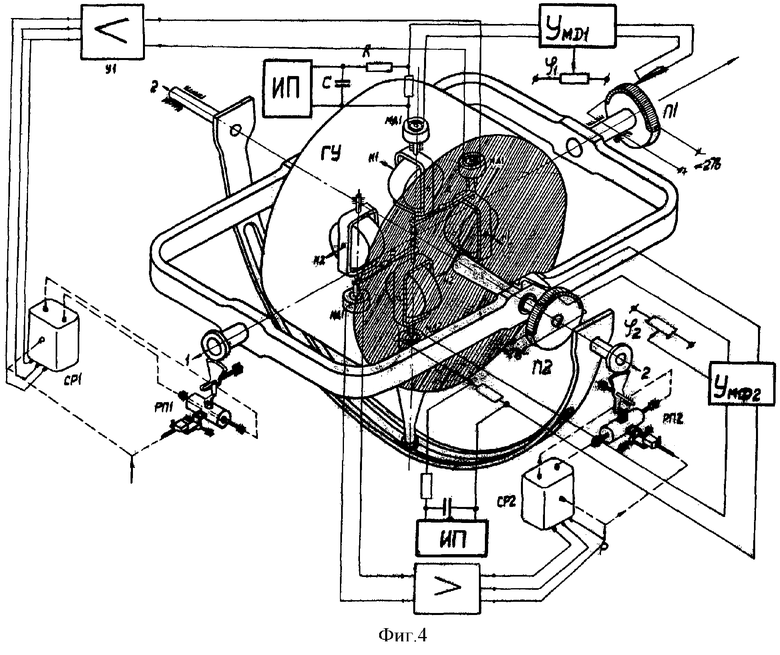
Устройство для измерения угловой скорости ухода гиростабилизатора, содержащее гироскоп, установленный на стабилизированной платформе с датчиком угла положения по оси подвеса, выход которого через усилитель подключен к датчику момента гироскопа, задающий датчик и измерительный прибор, отличающееся тем, что, с целью повышения точности работы устройства, в нем выход усилителя соединен с измерительным прибором через фильтр, причем второй вход усилителя подключен к задатчику.

