Предлагаемое изобретение относится к области измерителей линейных ускорений с дискретным выходом.
Известны, компенсационные акселерометры (и в частности маятниковые компенсационные акселерометры) с дискретным выходом и интегрирующим преобразователем, обладающие высокой статической и динамической точностью (например, акселерометр, предложенный Киселевым Л.Н. см. Труды НИИАП вып.3, 1967 г.). В состав этих акселерометров входит аналоговый контур, выходной ток которого пропорционален измеряемому ускорению, и интегрирующий преобразователь ток-дискретная величина. От подобных акселерометров кроме высокой статической точности преобразования, требуется хорошая вибро- и удароустойчивость и помехозащищенность, необходимая для точной предстартовой калибровки. Кроме того, диапазон работы преобразователя должен быть рассчитан на отработку, как рабочего, так и вибрационного ускорения.
Выполнение всех указанных требований затруднено вследствие того, что, как правило, улучшение одного параметра ухудшает другой. Так, например, увеличение виброустойчивости требует расширения полосы пропускания акселерометра, что в свою очередь ухудшает его помехозащищенность. Поэтому можно говорить лишь о выборе оптимального соотношения различных параметров акселерометра.
Известны также акселерометры с дискретным выходом, в которых благодаря применению двухконтурной структуры исключаются противоречия между статической и динамической точностью, а также между помехозащищенностью и виброустойчивостью.
В данных акселерометрах имеется два контура: низкочастотный с преобразованием аналоговой информации в дискретную и высокочастотный, который обеспечивает требуемое быстродействие и другие динамические параметры акселерометра. Сигналы с обоих контуров для их независимости друг от друга подаются на два самостоятельных датчика силы, воздействующих на одну и ту же подвижную систему.
Однако необходимость наличия двух датчиков силы в чувствительном элементе и сложность приборной реализации практически исключили применение данного акселерометра.
Целью предлагаемого изобретения является повышение вибро- и удароустойчивости, помехозащищенности акселерометра и уменьшение требуемого диапазона работы преобразователя.
Поставленная цель достигается тем, что, в компенсационный акселерометр с дискретным выходом, состоящий из чувствительного элемента с датчиками перемещения и силы, последовательно включенных регулирующего блока и интегрирующего преобразователя, введен корректирующий трехполюсник, состоящий из 2-х последовательно соединенных элементов, включенных между выходом регулирующего блока и входом преобразователя, средняя точка которых через конденсатор подключена к общей точке входа преобразователя и датчика силы чувствительного элемента.
На фиг.1 приведен пример структурной схемы предлагаемого акселерометра.
На фиг.1 - чувствительный элемент - 1, состоящий из воспринимающего элемента (маятника) - 2, подвижной системы - 3, датчика перемещения (угла) - 4, датчика силы (момента) - 5, регулирующего блока - 6 и корректирующего трехполюсника 7, состоящие из сопротивления R, подключенного к выходу регулирующего блока 6, индуктивности L, подключенной к входу интегрирующего аналого-цифрового преобразователя 8 и конденсатор С, включенный между средней точкой R и L корректирующего контура и средней точкой преобразователя 8 и чувствительного элемента 1.
Предлагаемый акселерометр работает следующим образом. При воздействии ускорения подвижная система - 3 отклоняется и с выхода датчика перемещения (угла) - 4 сигнал поступает на вход регулирующего блока - 6, после преобразования по определенному закону и усиления сигнал с выхода регулирующего блока 6 поступает на дополнительный корректирующий трехполюсник - 7. Здесь он проходит через сопротивление R и часть его через конденсатор С поступает непосредственно в датчик силы 5, а другая часть через индуктивность L и вход преобразователя 8 поступает в результате также в датчик силы 5 (момента) чувствительного элемента.
Подобный контур позволяет резко уменьшить величину сигнала помехи, поступающего на вход преобразователями тем самым, во-первых, увеличить стабильность его работы, а во-вторых, уменьшить необходимый диапазон работы преобразователя, ограничив его только величиной рабочего ускорения.
С другой стороны динамика замкнутого контура акселерометра будет определяться наличием конденсатора С, что обеспечивает высокое быстродействие и вибро- и удароустойчивость.
Статическая точность интегрирующего преобразователя 8 практически не ухудшается в этой схеме, поскольку все количество электричества, прошедшее через датчик силы 5, проходит и через вход интегрирующего преобразователя 8.
Указанное устройство прошло этап макетирования.
В схеме маятникового акселерометра с преобразователем с интегрирующим конденсатором на входе полосу пропускания удалось увеличить с 100 до 350 Гц, угловую колебательность при виброускорении Ig уменьшить с 1 угл. мин до 0,25 угл. мин, относительную нестабильность периода выходной частоты уменьшить с 1% до 0,1%. Уменьшение требуемого диапазона преобразователя с 26g до 16g позволило улучшить его соответствующие статические параметры.
Параметры дополнительного контура в рассматриваемом акселерометре таковы: R=200 ом, L=1 гн, С=1 мкф.
С целью уменьшения веса и габаритов дополнительного контура возможна замена индуктивности сопротивлением. При этом несколько ухудшается пропорциональность акселерометра за счет дополнительного подзаряда конденсатора трехполюсника при больших перегрузках. Однако в системах, где интересует интегральная ошибка, а величины ускорения в начале и конце работы примерно равны, эта ошибка пренебрежимо мала.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ДИСКРЕТНЫМ ВЫХОДОМ | 1978 |
|
SU1839853A1 |
| Прецизионный компенсационный маятниковый акселерометр | 1970 |
|
SU1839936A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2341805C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2541720C1 |
| АКСЕЛЕРОМЕТР | 2013 |
|
RU2541716C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ | 1985 |
|
SU1839979A1 |
| Компенсационный акселерометр | 2016 |
|
RU2631019C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2014 |
|
RU2555215C1 |
| Компенсационный акселерометр | 1974 |
|
SU1839839A1 |
Изобретение относится к области измерителей линейных ускорений с дискретным выходом. Сущность: акселерометр содержит чувствительный элемент с датчиком силы и датчиком смещения, усилитель обратной связи и интегрирующий преобразователь тока в частоту. При этом вход усилителя обратной связи соединен с датчиком смещения. Кроме того, блок снабжен индуктивностью и конденсатором, которые последовательно соединены между собой и присоединены параллельно входу интегрирующего преобразователя. Между точкой соединения индуктивности с конденсатором и одним из входных зажимов усилителя включен резистор. Обмотка датчика силы при этом включена между вторым выходным зажимом усилителя и точкой соединения конденсатора с преобразователем. Технический результат: повышение точности. 1 ил.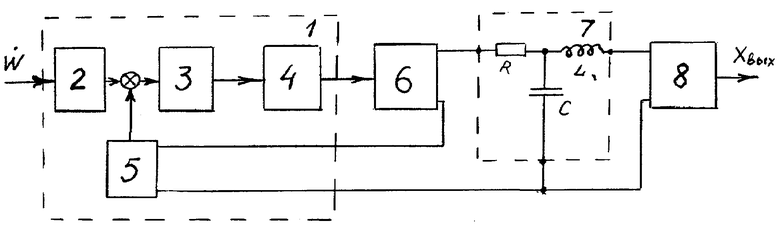
Компенсационный акселерометр с дискретным выходом, содержащий чувствительный элемент с датчиками смещения и силы, усилитель обратной связи, вход которого соединен с датчиком смещения и интегрирующий преобразователь тока в частоту, отличающийся тем, что, с целью повышения точности, он снабжен последовательно соединенными индуктивностью и конденсатором, которые присоединены параллельно входу интегрирующего преобразователя и резистором, включенным между точкой соединения индуктивности с конденсатором и одним из выходных зажимов усилителя, при этом обмотка датчика силы включена между вторым выходным зажимом усилителя и точкой соединения конденсатора с преобразователем.

