Изобретение относится к области точного приборостроения и может быть использовано в процессе производства маятниковых компенсационных акселерометров.
Известен способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа [патент RU 2627970 с датой приоритета 14.08.2017 г.], заключающийся в том, что в процессе наладки устанавливают акселерометр на центрифугу, задают последовательно ряд линейных ускорений в диапазоне измерения акселерометра, измеряют выходной сигнал акселерометра в зависимости от величины заданного линейного ускорения, корректируют параметры акселерометра, обеспечивая линейность зависимости выходного сигнала от заданного линейного ускорения.
Недостатком такого способа является то, что для определения корректирующих коэффициентов требуется создать большие ускорения с помощью центрифуги, а для снижения нелинейности выходной характеристики к акселерометру необходимо добавить блок цифровой электроники, формирующий коррекцию выходного сигнала. Такой способ снижения нелинейности масштабного коэффициента сложно реализуем при массовом производстве акселерометров, трудоемок и энергозатратен.
Прототипом предлагаемого способа является способ обеспечения линейности масштабного коэффициента компенсационных и маятниковых акселерометров, имеющих разбалансировку маятника, приведенный автором Сео Дже Бом в автореферате диссертации «Оптимизация параметров и моделирование рабочих режимов в компенсационных акселерометрах типа Q-flex и Si-flex» (Москва, 2012, типография МГТУ им. Н.Э. Баумана, библиотека МГТУ им. Н.Э. Баумана, УДК 629.7.05, с. 6, 14). Сущность предложенного способа заключается в смещении точки приложения инерционной силы за счет перемещения центра масс путем установки балансировочного груза на маятник либо путем выполнения балансировочного отверстия (см. стр. 14). По утверждению автора на стр. 6: «Полной балансировки маятника достигнуть не удается. В результате приходится смещать компенсационную силу относительно центра катушки плунжерного датчика. Обычно это обеспечивается путем выполнения арочных выборок в кольцевом зазоре магнитной системы плунжерного датчика». Для этого выполняют регулирование взаимодействия магнитных систем датчика момента с катушками датчика момента, размещенными на маятнике акселерометра по следующей методике:
1) устанавливают акселерометр на центрифугу и задают ряд значений положительных и отрицательных линейных ускорений, при каждом заданном ускорении измеряют выходной сигнал акселерометра;
2) при несоответствии линейности масштабного коэффициента норме разбирают акселерометр;
3) пользуясь указаниями инструкции по регулированию, определяют размер и расположение арочных выборок в кольцевом зазоре магнитной системы;
4) по результатам п. 3 выполняют арочные выборки в кольцевом зазоре магнитной системы, при этом происходит смещение компенсационной силы относительно центра катушки датчика момента;
5) вновь собирают акселерометр;
6) проверяют линейность масштабного коэффициента, повторяя контроль на центрифуге.
Недостатком способа-прототипа является то, что процессы смещения точки приложения инерционной силы с помощью балансировочных грузов или смещения компенсационной силы с помощью арочных выборок в магнитной системе индивидуальны для каждого экземпляра акселерометра, при массовом производстве эти процессы нетехнологичны, так как требуют многократного использования центрифуги при выполнении балансировки.
Задачей изобретения является разработка технологичного способа обеспечения линейности масштабного коэффициента широкодиапазонного маятникового акселерометра компенсационного типа без использования центрифуги.
Для решения поставленной задачи предлагается подбирать пары магнитных систем по минимальной разнице в воздействиях на выходные постоянные токи акселерометра-приспособления при двух положениях проверяемых магнитных систем, причем воздействия индуцируются переменным током сигнала в катушках датчика момента, подаваемого от внешнего генератора.
Акселерометром-приспособлением является аналогичный по конструкции акселерометр или другое устройство, ранее отрегулированные и имеющие требуемую для регулируемого акселерометра линейность масштабного коэффициента. В его состав входит технологическая магнитная система, которая идентична магнитным системам регулируемого акселерометра. Также в качестве акселерометра-приспособления, для проверки магнитных систем, может быть использован непосредственно регулируемый акселерометр.
Регулируемым акселерометром является маятниковый компенсационный акселерометр с магнитоэлектрическим датчиком момента, в который устанавливают подобранную пару магнитных систем.
Технологическая магнитная система обладает требуемыми параметрами и на определенных этапах реализации предложенного способа применяется в паре с проверяемой магнитной системой.
Проверяемая магнитная система является объектом проверки согласно предложенному способу, при котором вычисляется ее воздействие на выходные токи акселерометра. Две проверяемые магнитные системы с минимальной разницей в параметрах M1 и М2 обеспечивают линейность масштабного коэффициента маятникового компенсационного акселерометра.
Подбор пар решает задачу без использования центрифуги и без регулирования положения маятника относительно магнитных систем путем изменения нулевого сигнала датчика угла, где достаточно начальной установки нулевого положения маятника, производимой механически при сборке акселерометра.
Для реализации предложенного способа, акселерометр-приспособление должен быть установлен в положение осью чувствительности вдоль действия поля земного тяготения, при этом выполняется следующая последовательность действий:
1. Поочередная установка проверяемых магнитных систем в акселерометр-приспособление с установленной технологической магнитной системой и измерение значения постоянного выходного тока акселерометра-приспособления (I+g).
2. Подача переменного тока в катушки датчика момента с внешнего генератора с частотой выше верхней границы полосы пропускания регулируемого акселерометра и измерение значения постоянного выходного тока (I~).
3. Вычисление разности значений измеренных выходных токов I+g и I~ акселерометра-приспособления (параметра М~) по формуле М~=I~ - I+g.
4. Подбор пары магнитных систем с минимальной разностью значений M~.
5. Изъятие технологической магнитной системы и установка отобранной пары магнитных систем в акселерометр-приспособление с последующим выполнением действий по пунктам 1-3 для вычисления значения параметра M1.
6. Перестановка местами проверяемых магнитных систем той же пары в акселерометре-приспособлении и выполнение действий по пунктам 1-3 для вычисления значения параметра М2.
7. Вычисление полуразности значений параметров M1 и М2 (значения параметра ΔМ~) по формуле ΔМ~=(М2 - M1) / 2 и проверка вычисленного значения на соответствие требуемому значению.
Для повышения достоверности и точности подбора итоговой пары проверяемых магнитных систем возможны их дополнительное регулирование и проверка в собранном регулируемом акселерометре.
Для этого проверяемый акселерометр должен быть установлен в положение осью чувствительности вдоль действия поля земного тяготения. Дополнительная проверка реализуется тем, что в регулируемом акселерометре осуществляется сборка отобранной по параметру ΔМ~ пары проверяемых магнитных систем, и последующее выполнение действий по пунктам 1-3 для вычисления значения параметра разности значений измеренных выходных токов, и проверка вычисленного значения на соответствие требуемому значению.
При несоответствии требуемым характеристикам проверку выполняют с другой отобранной парой магнитных систем, а пару магнитных систем, давшую отрицательный результат, проверяют на других регулируемых акселерометрах.
Дополнительное регулирование перед заменой пары магнитных систем или при окончательной установке в акселерометр использует следующие приемы:
а) регулирование положения маятника с катушками относительно магнитных систем, путем изменения нулевого сигнала датчика угла до достижения требуемого значения параметра М~;
б) перестановка магнитных систем местами.
В пунктах 1-4 предлагаемого способа подбираются в пары магнитные системы по близости значений параметра М~, определяемого значением нормы. Подбор выполняется по значениям параметра М~ относительно одной технологической магнитной системы акселерометра-приспособления.
При измерении выходных токов акселерометра совмещение оси чувствительности акселерометра вдоль линии действия поля земного тяготения задает максимальное влияние силы тяжести на показания акселерометра, относительно которого должны проводиться все измерения выходных токов. Это можно выполнить, например, с помощью призмы горизонтирования и брускового уровня. Для этого начального положения измеряется, например микроамперметром, значение постоянного выходного тока акселерометра-приспособления или акселерометра (I+g), при отсутствии подачи переменного тока в катушки датчика момента с внешнего генератора.
По пунктам 5-7 предлагаемого способа, в акселерометре-приспособлении посредством измерений и вычислений определяются значения параметра ΔМ~ отобранных пар магнитных систем. Параметр характеризует то, насколько одинаково влияние магнитных систем на паразитный момент от квадрата величины выходного тока, то есть то, насколько магнитные системы друг друга компенсируют.
Как видно, согласно предложенному способу ключевую роль выполняют манипуляции, описанные в пунктах 1-3, которые повторяются согласно пунктам 5 и 6 способа, но при других условиях. Это позволяет выделить эти действия в «процедуру определения параметров», согласно которой измеряют значение постоянного выходного тока (I+g), после чего подают переменный ток в катушки датчика момента с частотой выше верхней границы полосы пропускания регулируемого акселерометра и измеряют значение постоянного выходного тока (I~). По результатам данных измерений вычисляется разность значений измеренных выходных токов M~, M1 или М2, в зависимости от стадии реализации способа.
В отличие от прототипа:
1. В действиях предлагаемого способа для определения нелинейности масштабного коэффициента не используется центрифуга, вместо этого перед сборкой и после сборки акселерометра для каждой магнитной системы проводят проверку влияний подачи переменного тока с внешнего генератора в катушки датчика момента в акселерометре-приспособлении, аналогичном акселерометру по конструкции, при его установке в положение осью чувствительности вдоль действия поля земного тяготения. Переменный ток подается с внешнего генератора с частотой выше верхней, границы полосы пропускания акселерометра, чтобы акселерометр как система автоматического регулирования не мог ее отработать, при этом переменный входной сигнал на выходе акселерометра преобразовывается в постоянную составляющую. Так, например, при проведении теста был подан ток частотой выше в 10 раз - 1000 Гц. Акселерометр-приспособление устанавливается в положение осью чувствительности вдоль действия поля земного тяготения и измеряется выходной ток акселерометра-приспособления (например, с точностью до 0,01 мкА). Подача переменного тока с внешнего генератора в катушки датчика момента приводит к имитации паразитного момента, возникающего при больших ускорениях, пропорционального квадрату величины выходного тока и вызывающего нелинейность выходной характеристики акселерометра. Влияние подачи переменного тока в катушки датчика момента определяют как разность между постоянным выходным током приспособления с подачей переменного тока в катушки датчика момента и постоянным выходным током приспособления, без подачи переменного тока в катушки датчика момента. Имитация паразитного момента, возникающего при больших ускорениях, объясняется следующим образом. Выходной ток акселерометра, протекающий в катушках датчика момента, пропорционален кажущемуся ускорению объекта, на котором установлен акселерометр. Катушка датчика момента, размещенная на маятнике, при протекании через нее тока образует электромагнит, который будет взаимодействовать с металлическими деталями магнитной системы. Сила взаимодействия будет пропорциональна квадрату величины тока, протекающего в катушке. В результате возникает соответствующий паразитный момент, и при больших ускорениях это приводит к нелинейности выходной характеристики акселерометра. При применении в конструкции акселерометра двух симметрично расположенных и встречно намагниченных магнитных систем вместе с двумя катушками на маятнике образуются два электромагнита, каждый из которых взаимодействует с расположенной рядом с ним магнитной системой.
Паразитные моменты, создаваемые электромагнитами от каждой магнитной системы, не будут полностью друг друга компенсировать по причине того, что магнитные системы обладают разным уровнем магнитной индукции в рабочих зазорах, свойствами магнитопроводящих деталей, расположением относительно маятника с катушками.
Для измерения данного паразитного момента от квадрата величины выходного тока, согласно прототипу, нужно задавать ускорения с помощью центрифуги, это является дорогостоящим, трудоемким и энергозатратным испытанием.
Предложенный способ упрощает измерение паразитного момента от квадрата величины выходного тока тем, что центрифуга заменена на подачу в катушку датчика момента переменного тока частотой выше верхней границы полосы пропускания акселерометра, что создает паразитный момент, эквивалентный паразитному моменту от задаваемых ускорений. В этом случае катушка датчика момента тоже образует электромагнит, и сила взаимодействия будет пропорциональна квадрату величины действующего значения переменного тока. При этом уже не требуется центрифуга.
2. Вместо выполнения арочных выборок в кольцевом зазоре магнитной системы в пунктах 1-4 проводят предварительный отбор магнитных систем в пары по минимальной разнице влияний переменного тока, в пунктах 5-7 для каждой пары проверяют полуразность влияний подачи переменных токов, измеренных при двух противоположных вариантах расположения магнитных систем в акселерометре-приспособлении на соответствие заданному требованию по одинаковости влияния магнитных систем на паразитный момент.
В отличие от прототипа, подбор магнитных систем в пары по минимальной полуразности влияний переменного тока позволяет отказаться от использования центрифуги и обеспечить минимальное влияние магнитных систем на паразитный момент, возникающий при больших ускорениях, пропорциональный квадрату величины выходного тока и, следовательно, уменьшить нелинейность выходной характеристики акселерометра.
Состав рабочего места, на котором было проверено воспроизведение способа:
- Акселерометр-приспособление является ранее отрегулированным акселерометром с соответствующей норме инструкции по регулированию линейностью масштабного коэффициента, применяется к регулированию соответствующих акселерометров согласно инструкции. Входящие в его состав магнитные системы являются технологическими магнитными системами.
- Генератор частоты, например Г3-112.
- Микроамперметр, например, цифровой мультиметр Agilent 3458А.
- Призма горизонтирования, выставленная в горизонт по брусковому уровню с погрешностью ±10''.
- Блок питания, обеспечивающий работу акселерометра, например, источник питания GW Instec GPS-73030D.
Предлагаемый способ можно осуществить на акселерометре-приспособлении, имеющем возможность многократно устанавливать и менять местами магнитные системы датчика момента, а на регулируемых акселерометрах достаточно однократной установки магнитных систем. Для реализации акселерометра-приспособления можно использовать отрегулированный акселерометр с параметрами, соответствующими требуемым значениям линейности масштабного коэффициента. Примерный вид акселерометра-приспособления схематично показан на фиг.
Техническим результатом является обеспечение требуемой линейности масштабного коэффициента маятникового акселерометра компенсационного типа без использования центрифуги.
Таким образом, заявлен способ обеспечения линейности масштабного коэффициента в маятниковых компенсационных акселерометрах с магнитоэлектрическим датчиком момента, заключающийся в том, что в установленный в положение осью чувствительности вдоль действия поля земного тяготения акселерометр-приспособление, в качестве которого выступает либо регулируемый акселерометр, либо аналогичное ему устройство, с установленной технологической магнитной системой, поочередно помещают проверяемые магнитные системы, с которыми проводят процедуру определения параметров: измеряют значение постоянного выходного тока (I+g), после чего подают переменный ток в катушки датчика момента с частотой выше верхней границы полосы пропускания регулируемого акселерометра и измеряют значение постоянного выходного тока (I~), далее вычисляют разность значений измеренных выходных токов (М~=I~ - I+g,); после чего подбирают пары магнитных систем с минимальной разностью вычисленных значений М~, извлекают технологическую магнитную систему и устанавливают подобранную пару проверяемых магнитных систем в акселерометр-приспособление, в котором аналогично проводят процедуру определения параметров, получая разность значений измеренных выходных токов M1, после чего переставляют местами проверяемые магнитные системы той же пары и повторяют процедуру определения параметров, получая разность значений измеренных выходных токов М2; вычисляют полуразность вычисленных значений M1 и М2 для двух положений одной пары проверяемых магнитных систем ΔМ~=(М2-М1)/2 и проверяют вычисленное значение полуразности ΔМ~ на соответствие требуемым параметрам, после чего подобранную таким образом пару магнитных систем устанавливают в регулируемый акселерометр.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обеспечения линейности масштабного коэффициента маятникового широкодиапазонного акселерометра компенсационного типа | 2016 |
|
RU2627970C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2011 |
|
RU2465608C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| СПОСОБ РЕГУЛИРОВКИ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1979 |
|
SU1839894A1 |
| АКСЕЛЕРОМЕТР | 2006 |
|
RU2313100C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| Способ определения изменения параметров маятникового поплавкового компенсационного акселерометра | 1990 |
|
SU1755205A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЛИНЕЙНОСТИ МАСШТАБНОГО КОЭФФИЦИЕНТА МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА КОМПЕНСАЦИОННОГО ТИПА | 2016 |
|
RU2626071C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441247C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
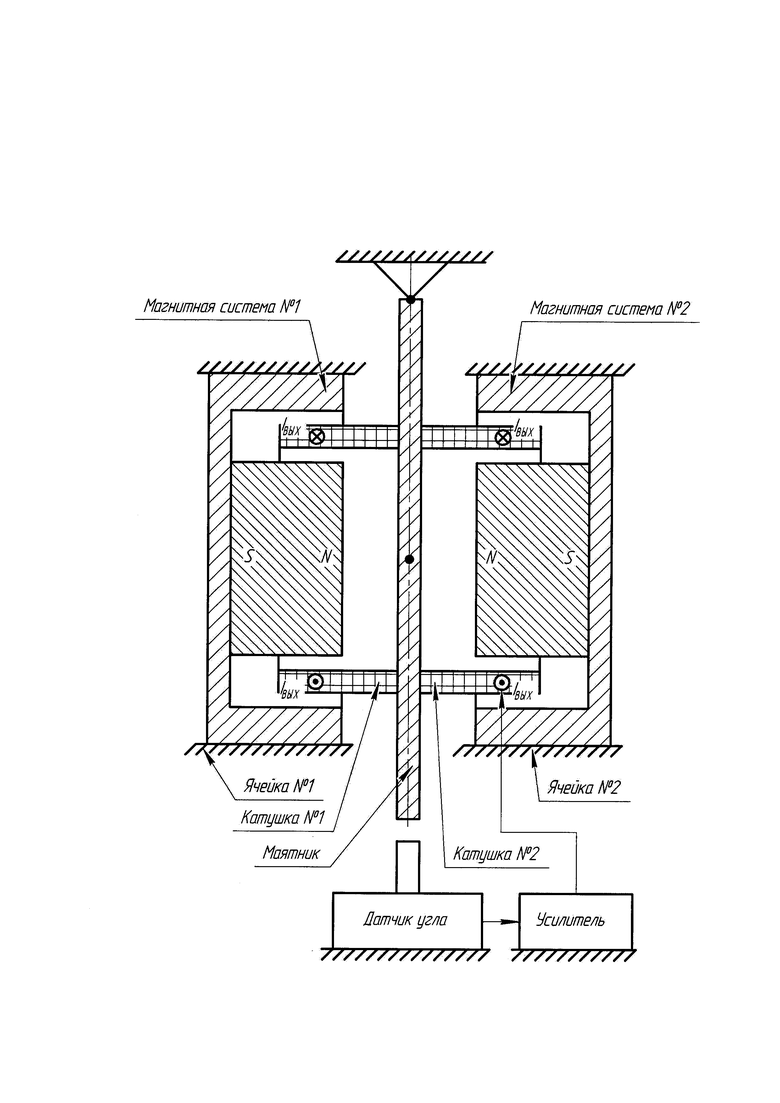
Изобретение относится к области измерительной техники. Сущность изобретения заключается в том, что подбирают пары магнитных систем по минимальной разнице в воздействиях на выходные постоянные токи акселерометра-приспособления при двух положениях проверяемых магнитных систем, причем воздействия индуцируются переменным током сигнала в катушках датчика момента, подаваемого от внешнего генератора. Технический результат – обеспечение требуемой линейности масштабного коэффициента маятникового акселерометра компенсационного типа. 1 ил.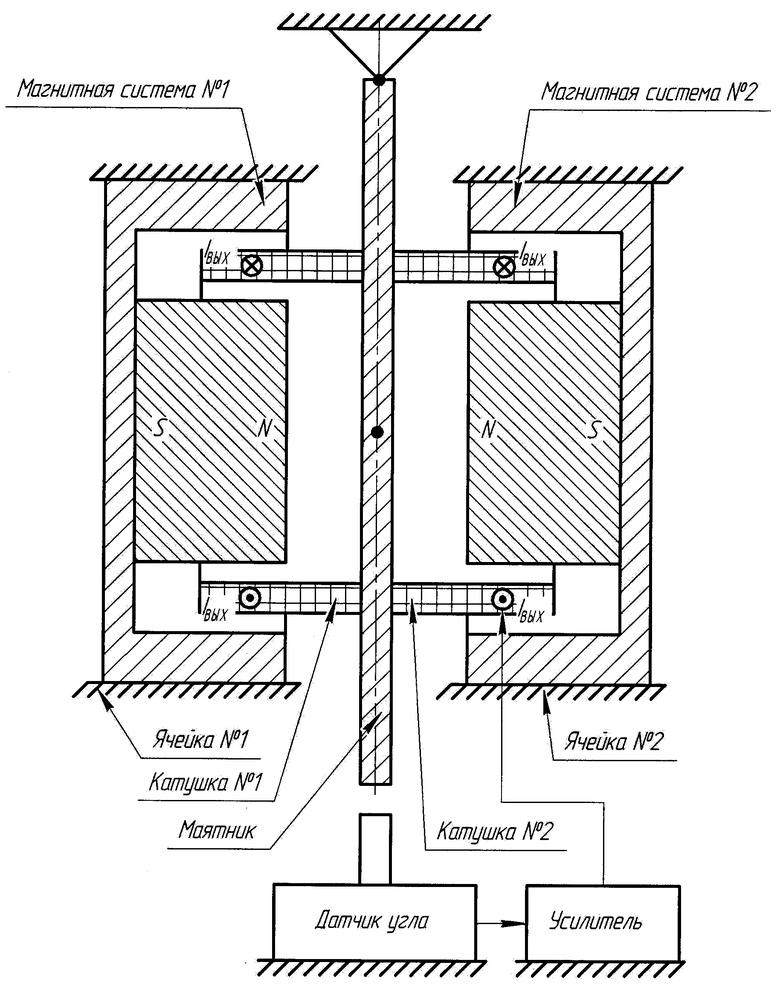
Способ обеспечения линейности масштабного коэффициента в маятниковых компенсационных акселерометрах с магнитоэлектрическим датчиком момента, заключающийся в том, что в установленный в положение осью чувствительности вдоль действия поля земного тяготения акселерометр-приспособление, в качестве которого выступает либо регулируемый акселерометр, либо аналогичное ему устройство, с установленной технологической магнитной системой, поочередно помещают проверяемые магнитные системы, с которыми проводят процедуру определения параметров: измеряют значение постоянного выходного тока (I+g), после чего подают переменный ток в катушки датчика момента, с частотой выше верхней границы полосы пропускания регулируемого акселерометра, и измеряют значение постоянного выходного тока (I~), далее вычисляют разность значений измеренных выходных токов (М~=I~ - I+g,); после чего подбирают пары магнитных систем с минимальной разностью вычисленных значений M~, извлекают технологическую магнитную систему и устанавливают подобранную пару проверяемых магнитных систем в акселерометр-приспособление, в котором аналогично проводят процедуру определения параметров, получая разность значений измеренных выходных токов M1, после чего переставляют местами проверяемые магнитные системы той же пары и повторяют процедуру определения параметров, получая разность значений измеренных выходных токов М2; вычисляют полуразность вычисленных значений M1 и М2 для двух положений одной пары проверяемых магнитных систем ΔМ~=(М2-М1)/2 и проверяют вычисленное значение полуразности ΔМ~ на соответствие требуемым параметрам, после чего подобранную таким образом пару магнитных систем устанавливают в регулируемый акселерометр.

