Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных импульсно-доплеровских комплексах. Преимуществом РЛС, устанавливаемых на борту самолета, является увеличение максимальной дальности обнаружения низколетящих воздушных и надводных целей. Однако при этом обнаружение целей производится на фоне мощных отражений от поверхности суши или моря, причем источники мешающих отражений перемещаются относительно самолета. При этом средняя частота спектра помех, вызванных отражениями от земли, будет изменяться в соответствии с изменением величины проекции скорости носителя на линию визирования [1].
Для обеспечения максимальной режекции отражений от подстилающей поверхности необходимо совместить центр спектра помех с областью максимальной режекции частотной характеристики устройства селекции движущихся целей (СДЦ), т.е. скомпенсировать доплеровскую частоту, возникающую в эхо-сигнале и связанную с движением носителя РДС. Этого можно добиться смещением промежуточной или несущей частоты радиолокационного сигнала на величину, равную средней частоте спектра помех и зависящую от скорости и углового положения антенны относительно курсовой скорости носителя.
Устройство, взятое за прототип, и предназначенное для компенсации доплеровской частоты, возникающей в эхо-сигнале, отраженном от подстилающей поверхности, входит в состав импульсно-доплеровской РЛС, расположенной на движущемся носителе [2]. Устройство содержит цепь двойного преобразования частоты опорного гетеродина промежуточной частоты, включенную между выходом опорного гетеродина и входом фазового детектора приемника, два кварцевых гетеродина, первый из которых является управляемым, а второй опорным, выход первого гетеродина соединен со входом первого смесителя устройства двойного преобразования частоты, а выход второго гетеродина соединен со входом второго смесителя; второй гетеродин является опорным, а управление частотой первого кварцевого гетеродина осуществляется с помощью устройства формирования управляющего напряжения, ко входам которого подключены выходы аналого-цифрового преобразователя PЛC, и выходной аналоговый сигнал которого управляет частотой первого гетеродина в соответствии с доплеровской частотой эхо-сигнала.
Таким образом, в выходном сигнале фазового детектора на видеочастоте компенсируется частотный сдвиг, связанный с движением носителя, причем погрешность компенсации определяется временем задержки в цепи обратной связи частотной автоподстройки, необходимым для формирования управляющего сигнала [2].
Устройство формирования управляющего напряжения содержит два параллельных канала, каждый из которых состоит из последовательно соединенных доплеровского фильтра, детектора и интегратора, причем частотные характеристики фильтров в каналах смещены на fn/4 относительно нуля доплеровских частот (fn - частота повторения зондирующих импульсов РЛС). Значение мощности сигнала на выходе каждого интегратора зависит от интенсивности помехи и величины и знака доплеровского смещения. Выходы интеграторов соединены со входами устройства вычисления разности интегралов и максимального из них, выходы последнего устройства соединены со входами устройства деления полученной разности на максимальное значение. Полученный цифровой управляющий код, пропорциональный доплеровской частоте эхо-сигнала, преобразуется в аналоговое напряжение Uупр в цифроаналоговом преобразователе и является управляющим напряжением для первого гетеродина.
К недостаткам прототипа следует отнести
1. Увеличение погрешности компенсации за счет наличия значительной шумовой составляющей в управляющем сигнале при использовании для формирования управляющего кода эхо-сигналов малой интенсивности, т.е. с малым отношением сигнал/шум [3].
2. Увеличение погрешности и появление регулярной ошибки компенсации при значениях доплеровской частоты, превышающих граничное, возникающее за счет неоднозначности интервала регулирования вследствие периодичности частотных характеристик доплеровских фильтров.
Целью настоящего изобретения является уменьшение погрешности компенсации доплеровской частоты за счет повышения достоверности используемой информации путем предварительного отбора по интенсивности эхо-сигналов, используемых для формирования управляющего напряжения, а также за счет исключения возможности появления регулярной ошибки, возникающей при превышении некоторого порогового значения доплеровской частоты.
Поставленная цель достигается тем, что в известное устройство, взятое за прототип, содержащее цепь двойного преобразования опорной частоты фазового детектора, включенную между опорным гетеродином РЛС и входом фазового детектора приемника РЛС, два кварцевых гетеродина, первый из которых является управляемым, а второй - опорным, причем выход первого гетеродина подключен ко входу первого смесителя, а выход второго гетеродина - ко входу второго смесителя цепи двойного преобразования частоты, а также содержащее устройство формирования управляющего напряжения, состоящее из двух параллельных каналов, общий вход которых подключен к выходу аналого-цифрового преобразователя PЛC, а каждый из каналов состоит из последовательно соединенных доплеровского фильтра, детектора и интегратора, причем частотные характеристики фильтров смещены на  относительно нуля доплеровских частот, а выходы интеграторов соединены раздельно со входами устройства вычисления разности интегральных значений и максимального из них, выходы последнего соединены раздельно со входами делителя разности на максимальное значение, на выходе которого формируется первый - "точный" - код управления частотой гетеродина, согласно изобретению введена дополнительная схема формирования "грубого" кода управления, которая содержит два параллельных цифровых многоразрядных счетчика, ко входам которых подключены сигналы опорного и управляемого гетеродинов, а выходы соединены раздельно с устройством вычисления разности частот гетеродинов, выход которого соединен со входом устройства вычисления разности между полученным результатом и значением доплеровской частоты, определяемой движением носителя, причем источник формирования текущего значения доплеровской частоты подключен ко входу устройства формирования "грубого" кода управления, а выход устройства вычисления этой разности является выходом дополнительного устройства формирования "грубого" кода управления и подключен ко входу коммутатора, ко второму входу которого подключен сигнал "точного" кода управления, а к управляющему входу коммутатора подключен сигнал с выхода схемы отбора и управления коммутатором, при этом схема отбора и управления коммутатором состоит из двух параллельно включенных цепей, одна из которых состоит из последовательно соединенных устройств сравнения эхо-сигналов по интенсивности и стробирования по дальности, а другая представляет собой устройство сравнения доплеровской частоты, причем выходы обоих устройств соединены раздельно с формирователем управления коммутатором, выход которого соединен с управляющим входом коммутатора, при этом вход устройства отбора по интенсивности и стробирования по дальности подключен к выходам аналого-цифровых преобразователей, а вход схемы сравнения доплеровской частоты соединен с выходом устройства формирования "грубого" кода управления, при этом выход коммутатора соединен со входом цифрового интегратора, выход которого соединен со входом цифроаналогового преобразователя, выходной сигнал которого является сигналом управления частотой первого гетеродина.
относительно нуля доплеровских частот, а выходы интеграторов соединены раздельно со входами устройства вычисления разности интегральных значений и максимального из них, выходы последнего соединены раздельно со входами делителя разности на максимальное значение, на выходе которого формируется первый - "точный" - код управления частотой гетеродина, согласно изобретению введена дополнительная схема формирования "грубого" кода управления, которая содержит два параллельных цифровых многоразрядных счетчика, ко входам которых подключены сигналы опорного и управляемого гетеродинов, а выходы соединены раздельно с устройством вычисления разности частот гетеродинов, выход которого соединен со входом устройства вычисления разности между полученным результатом и значением доплеровской частоты, определяемой движением носителя, причем источник формирования текущего значения доплеровской частоты подключен ко входу устройства формирования "грубого" кода управления, а выход устройства вычисления этой разности является выходом дополнительного устройства формирования "грубого" кода управления и подключен ко входу коммутатора, ко второму входу которого подключен сигнал "точного" кода управления, а к управляющему входу коммутатора подключен сигнал с выхода схемы отбора и управления коммутатором, при этом схема отбора и управления коммутатором состоит из двух параллельно включенных цепей, одна из которых состоит из последовательно соединенных устройств сравнения эхо-сигналов по интенсивности и стробирования по дальности, а другая представляет собой устройство сравнения доплеровской частоты, причем выходы обоих устройств соединены раздельно с формирователем управления коммутатором, выход которого соединен с управляющим входом коммутатора, при этом вход устройства отбора по интенсивности и стробирования по дальности подключен к выходам аналого-цифровых преобразователей, а вход схемы сравнения доплеровской частоты соединен с выходом устройства формирования "грубого" кода управления, при этом выход коммутатора соединен со входом цифрового интегратора, выход которого соединен со входом цифроаналогового преобразователя, выходной сигнал которого является сигналом управления частотой первого гетеродина.
Таким образом, сущность предлагаемого изобретения заключается в усовершенствовании прототипа, который полностью является объектом изобретения по заявке №4520658 от 25 сентября 1989 г.
Сопоставительный анализ с прототипом показывает на наличие новых блоков и функциональных связей, что соответствует критерию изобретения "новизна".
Сравнение заявляемого решения с другими техническими решениями не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "существенное отличие".
Сущность изобретения поясняется нижеприведенным описанием и графическими материалами.
На чертежах и в тексте приняты следующие обозначения.
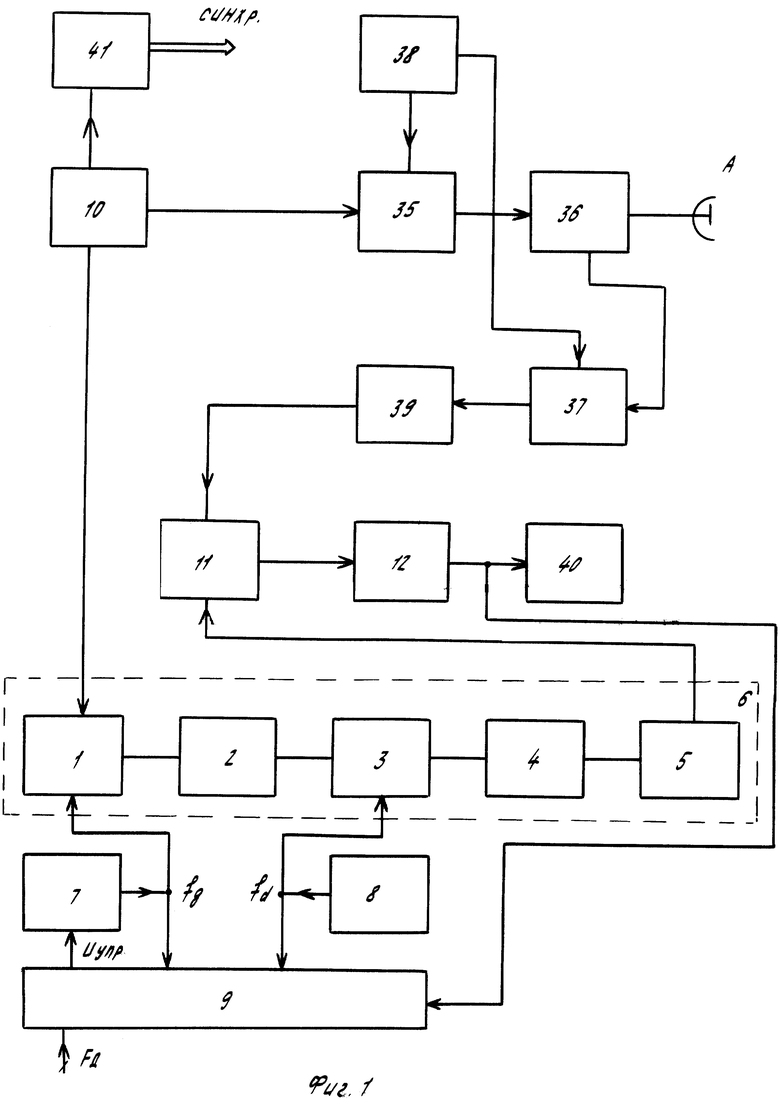
На фиг.1 изображена структурная схема предлагаемого устройства в составе импульсно-доплеровской РЛС.
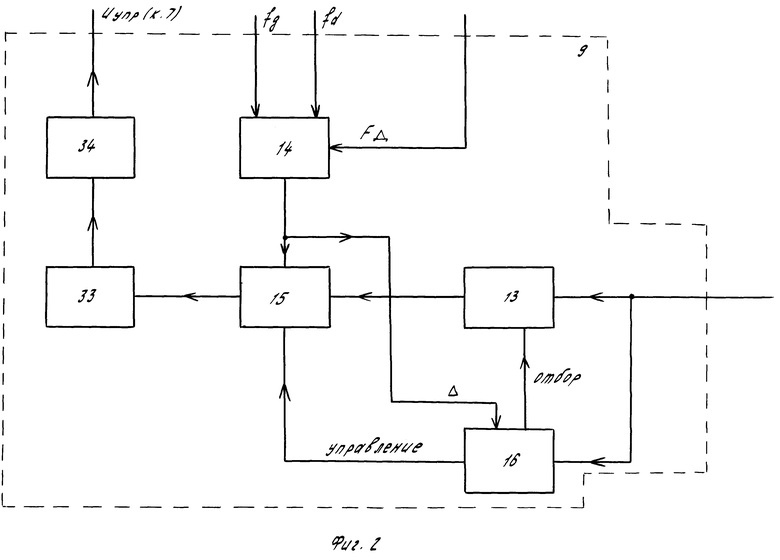
На фиг.2 изображена структурная схема устройства формирования управляющего напряжения.
На фиг.3 изображена структурная схема отбора и управления коммутатором.
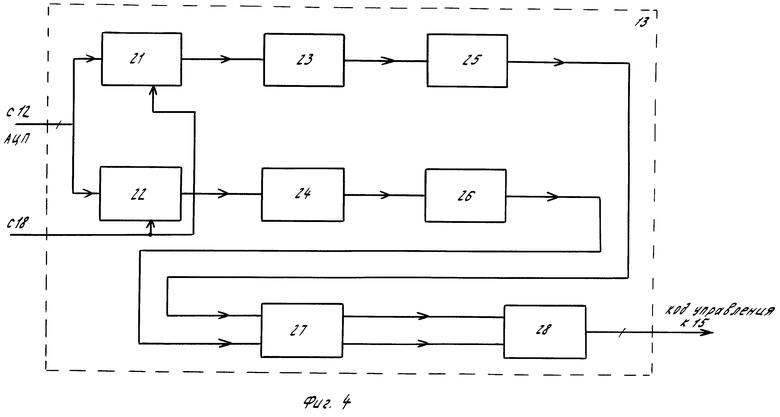
На фиг.4 изображена структурная схема устройства формирования "точного" кода управления.
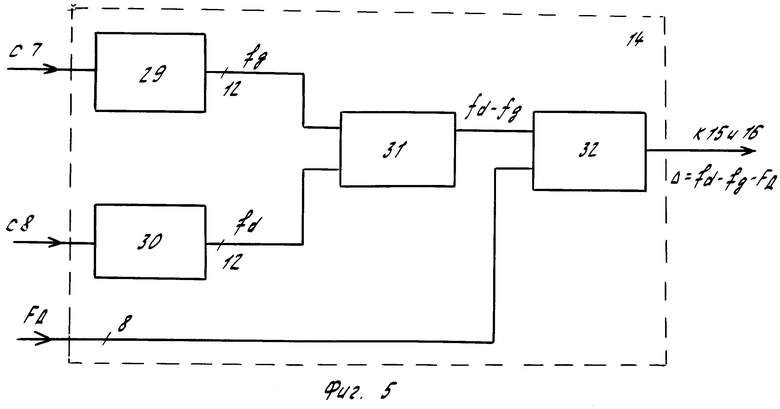
На фиг.5 изображена структурная схема "грубого" кода управления.
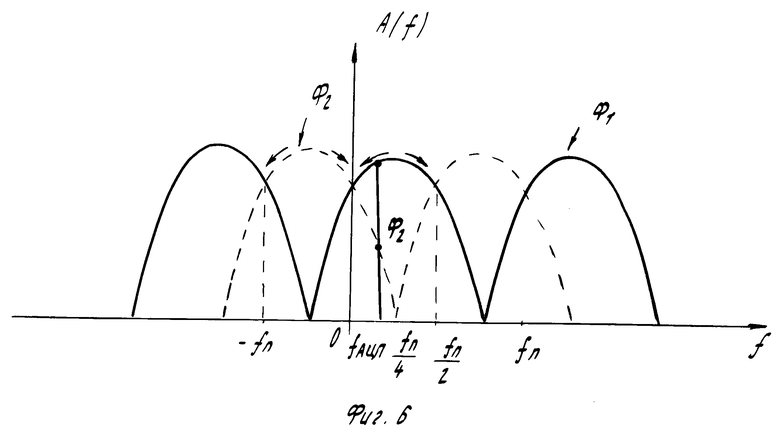
На фиг.6 приведены частотные характеристики двух симметрично сдвинутых относительно нуля доплеровских фильтров.
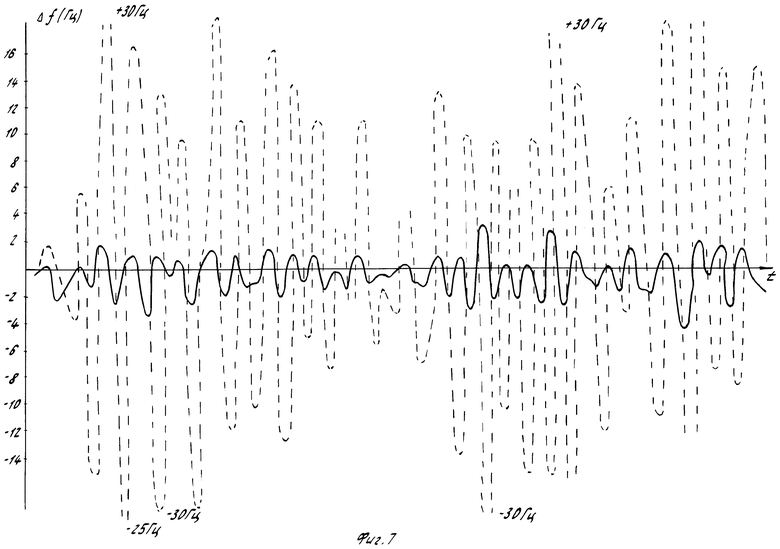
На фиг.7 приведен график зависимости погрешности компенсации при линейном изменении доплеровской частоты входных эхо-сигналов и различных отношениях сигнал/шум на входе приемного устройства.
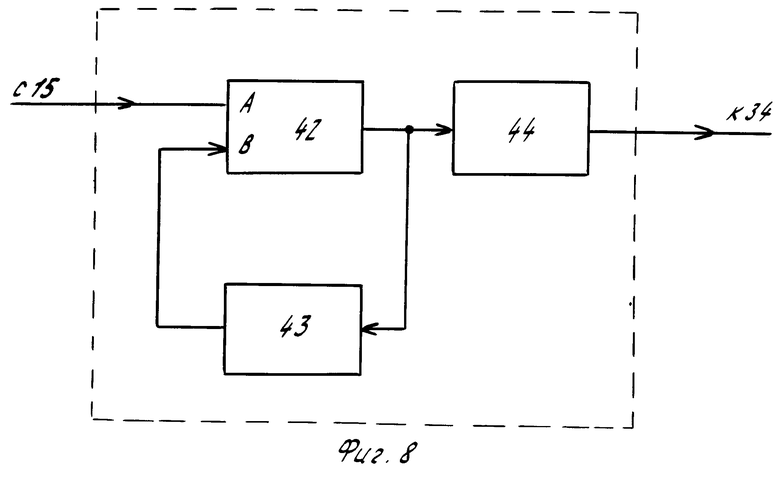
На фиг.8 приведена структурная схема цифрового интегратора.
1 - первый смеситель схемы двойного преобразования частоты;
2 - первый фильтр схемы двойного преобразования частоты;
3 - второй смеситель схемы двойного преобразования частоты;
4 - второй фильтр схемы двойного преобразования частоты;
5 - усилитель промежуточной частоты;
6 - схема двойного преобразования частоты;
7 - управляемый гетеродин;
8 - опорный гетеродин;
9 - устройство формирования управляющего напряжения;
10 - опорный гетеродин РЛС;
11 - фазовый детектор РЛС;
12 - аналого-цифровой преобразователь;
13 - устройство формирования "точного" кода управления;
14 - устройство формирования "грубого" кода управления;
15 - коммутатор;
16 - схема отбора сигналов и управления коммутатором;
17 - схема сравнения эхо-сигналов по интенсивности;
18 - схема стробирования эхо-сигналов по дальности;
19 - формирователь управления коммутатором;
20 - схема сравнения доплеровской частоты;
21 - доплеровский фильтр Ф1;
22 - доплеровский фильтр Ф2;
23 - детектор фильтра Ф1-DetФ1;
24 - детектор фильтра Ф2-DetФ2;
25 - интегратор фильтра Ф1-∑DetФ1;
26 - интегратор фильтра Ф2-∑DetФ2;
27 - устройство вычисления разности ∑DetФ1-∑DetФ2 и максимального значения мах {∑DetФ1; ∑DetФ2};
28 - устройство вычисления отношения  ;
;
29 - счетчик частоты управляемого гетеродина;
30 - счетчик частоты опорного гетеродина;
31 - устройство вычисления разности частот Δ1=fd-fg;
32 - устройство вычисления разности Δ=Δ1-FД;
33 - цифровой интегратор;
34 - цифроаналоговый преобразователь;
35 - смеситель передатчика РЛС;
36 - антенный коммутатор РЛС;
37 - смеситель приемника РЛС;
38 - высокочастотный гетеродин РЛС;
39 - усилитель промежуточной частоты УПЧ;
40 - устройство первичной обработки РЛС;
41 - хронизатор РЛС;
42 - сумматор;
43, 44 - регистры.
Предлагаемое устройство (см. фиг.1) состоит из последовательно соединенных первого смесителя 1, первого фильтра 2, второго смесителя 3, второго фильтра 4, усилителя 5, которые образуют схему двойного преобразования частоты 6, первого (управляемого) кварцевого гетеродина 7, второго гетеродина 8, устройства формирования управляющего напряжения 9, при этом один из входов смесителя 1 служит для подключения выходного сигнала опорного гетеродина 10 РЛС, а выход усилителя 5 служит для подключения к одному из входов фазового детектора 11 РЛС, и является выходом всего устройства, выход гетеродина 7 подключен ко второму входу смесителя 1 и одновременно к одному из входов устройства формирования управляющего напряжения 9, а выход гетеродина 8 подключен ко второму входу смесителя 3 и одновременно ко второму входу устройства формирования управляющего напряжения 9, при этом к управляющему входу гетеродина 7 подключается выходной сигнал устройства формирования управляющего напряжения 9, входными сигналами которого являются также сигналы с выходов аналого-цифрового преобразователя АЦП 12, а также сигнал доплеровской частоты FД, поступающий в виде 8-разрядного цифрового кода с бортового вычислительного комплекса. При этом устройство формирования управляющего напряжения (см. фиг.2) содержит две схемы формирования управляющего кода: "точную" 13 и "грубую" 14, выходы которых подключены ко входам коммутатора 15, который управляется сигналом с выхода схемы отбора и управления 16, входными сигналами которой являются сигналы с выхода аналого-цифровых преобразователей 12, а также выходной сигнал схемы формирования "грубого" кода управления 14. Сигналы аналого-цифровых преобразователей 12 подключены ко входу последовательно соединенных схем сравнения по интенсивности 17 (см. фиг.3) и стробирования по дальности 18, причем выходной сигнал схемы отбора по дальности поступает на управляющий вход схемы формирования точного кода управления 13, а также на вход формирователя управления коммутатором 19, причем на второй вход формирователя 19 поступает сигнал с выхода схемы сравнения доплеровской частоты 20, на вход которой поступает выходной сигнала схемы формирования "грубого" кода управления 14. Выходной сигнал формирователя управления коммутатором 19 поступает на управляющий вход коммутатора 15, переключая на его выход коды управления "точный" или "грубый" в зависимости от значения управляющего сигнала.
Схема формирования "точного" кода управления 13 (см. фиг.4) содержит два параллельных канала, к общему входу которых подключены выходы АЦП 12, каждый из каналов состоит из последовательно соединенных доплеровского фильтра 21 (22), детектора 23 (24), интегратора 25 (26), причем выходы интеграторов соединены раздельно со входом устройства 27, вычисляющего разность интегральных значений и максимальное из них, выходы устройства 27 соединены раздельно со входами делителя полученной разности на максимальное значение, а выход делителя является выходом устройства формирования "точного" кода управления и соединен со входом коммутатора. Устройство формирования "грубого" кода управления 14 (см. фиг.5) содержит два параллельных цифровых многоразрядных счетчика 29 и 30, входными счетными последовательностями которых являются выходные сигналы гетеродинов 7 и 8, выходы счетчиков соединены со входом устройства 31 вычисления разности частот fd-fg, где fd - частота гетеродина 8, fg - частота гетеродина 7; разностный выходной сигнал устройства 31 соединяется с одним из входов устройства 32 вычисления разности Δ=fd-fg-Fд, где Fд - значение доплеровской частоты, обусловленной движением носителя, значение которой в виде 8-разрядного кода вычисляется в бортовом вычислительном комплексе и подключается ко входу устройства вычисления грубого кода управления 14. Выход устройства 32 является выходом схемы формирования "грубого" кода управления и соединяется со входом коммутатора 15; выходной сигнал коммутатора подключен ко входу цифрового интегратора 33, с выхода которого сигнал поступает на вход цифроаналогового преобразователя 34, выход которого является выходом всего устройства формирования управляющего напряжения 9 и управляет частотой гетеродина 7.
Рассмотрим работу устройства компенсации доплеровской частоты, возникающей в эхо-сигнале, в составе импульсно-доплеровской РЛС (см. фиг.1), в состав которой входит опорный гетеродин 10 промежуточной частоты, выход которого подключен к смесителю 35 передатчика, соединенному с антенным коммутатором 36 и далее с антенной системой А. Антенный коммутатор соединен также со смесителем приемника 37, на второй вход которого подается сигнал высокочастотного гетеродина 38. Зондирующие сигналы, когерентные сигналу опорного гетеродина 10, поступают на антенную систему через смеситель 35 и коммутатор 36, вследствие чего имеют начальную фазу, связанную с фазой опорного гетеродина 10, фаза высокочастотного гетеродина 38 исключается при преобразовании эхо-сигналов, принятых антенной системой, в смесителе 37.
Таким образом, фаза эхо-сигналов, поступающих на вход фазового детектора 11 с усилителя 39, будет связана с фазой опорного гетеродина 10 и содержать фазовый сдвиг, пропорциональный доплеровской частоте, возникающий при движении носителя и вращении антенной системы. Если опорным сигналом фазового детектора 11 является сигнал опорного гетеродина 10 PЛС, то выходные видео-сигналы фазового детектора будут иметь центральную частоту, равную доплеровской частоте, связанной с движением. Далее эти сигналы поступают на аналого-цифровой преобразователь 12 и устройство обработки 40.
При преобразовании на видео-частоту в фазовом детекторе 11 эта частота может быть исключена путем изменения на соответствующую величину частоты опорного напряжения фазового детектора 11. Для этого между выходом опорного гетеродина 10 и входом фазового детектора 11 включается схема двойного преобразования частоты 6. В результате преобразования в опорном сигнале фазового детектора 11 возникает частотный сдвиг, соответствующий разности частот гетеродинов 7 и 8, при этом частота управляемого гетеродина изменяется при соответствующем изменении величины управляющего напряжения Uупр, поступающего со схемы формирования управляющего напряжения 9. Схема формирования управляющего напряжения должна быть построена в общем случае таким образом, чтобы поступающую на нее информацию о величине и знаке доплеровской частоты, связанной с движением, преобразовать в аналоговое управляющее напряжение Uупр.
В схеме, описанной в прототипе, информация о величине и знаке доплеровской частоты извлекается непосредственно из эхо-сигналов. Схема формирования "точного" кода управления 13 в предлагаемом устройстве аналогична схеме, описанной в прототипе. Работа устройства формирования "точного" кода управления происходит следующим образом.
Эхо-сигналы с выхода фазового детектора, переведенные в цифровой код в аналого-цифровых преобразователях 12, поступают на схему формирования "точного" кода управления 13 и являются входными сигналами двух параллельно включенных доплеровских фильтров, частотные характеристики которых симметрично сдвинуты относительно нуля доплеровских частот на  (см. фиг.6). Если доплеровская частота сигнала, поступающего на эти фильтры, отлична от нуля, то на выходе фильтров выделяются сигналы, зависящие от величины и знака доплеровской частоты; затем эти сигналы детектируются в детекторах 23, 24 для получения значений мощности эхо-сигналов на выходах фильтров и интегрируются в 25, 26, т.е. значение мощности на выходе каждого фильтра усредняется на некотором интервале дальности. Разность этих усредненных значений, полученная в устройстве 27, нормируется в устройстве 28 путем деления на максимальное из вычисленных значений, в результате чего формируется цифровой управляющий код. Величина и знак полученного сигнала зависят от значения доплеровской частоты эхо-сигнала и изменяются таким образом, чтобы скомпенсировать доплеровскую частоту эхо-сигналов при преобразовании в фазовом детекторе.
(см. фиг.6). Если доплеровская частота сигнала, поступающего на эти фильтры, отлична от нуля, то на выходе фильтров выделяются сигналы, зависящие от величины и знака доплеровской частоты; затем эти сигналы детектируются в детекторах 23, 24 для получения значений мощности эхо-сигналов на выходах фильтров и интегрируются в 25, 26, т.е. значение мощности на выходе каждого фильтра усредняется на некотором интервале дальности. Разность этих усредненных значений, полученная в устройстве 27, нормируется в устройстве 28 путем деления на максимальное из вычисленных значений, в результате чего формируется цифровой управляющий код. Величина и знак полученного сигнала зависят от значения доплеровской частоты эхо-сигнала и изменяются таким образом, чтобы скомпенсировать доплеровскую частоту эхо-сигналов при преобразовании в фазовом детекторе.
Анализ показал, что если динамический диапазон эхо-сигналов, принятых антенной системой, мал по отношению к собственным шумам приемного устройства, то сформированный в устройстве 13 управляющий сигнал будет также иметь ограниченный динамический диапазон. Наличие шумов в управляющем сигнале приведет к увеличению погрешности компенсации (см. фиг.7). Из приведенных графиков следует, что при уменьшении отношения сигнал/шум ниже 20-25 дБ ошибка компенсации может достигать 10-12 Гц и более. Чтобы исключить такую большую погрешность при формировании управляющего сигнала, в схеме 13 необходимо ввести предварительное сравнение интенсивности эхо-сигналов с пороговым значением и отбора для дальнейшей обработки сигналов с определенным превышением над уровнем шумов. Анализ интенсивности эхо-сигналов производится в устройстве 17, представляющем собой цифровое пороговое устройство [4]. С выхода устройства 17 сигналы, имеющие заданное превышение над шумом, поступают на устройство стробирования по дальности 18, в котором для дальнейшего анализа выделяются путем стробирования сигналы на участке дальности, где ошибка в определении доплеровской частоты, связанная с эффектом наклонной дальности, составляет не более 10% (см.[1]). Для конкретной импульсно-доплеровской РЛС дальность, начиная с которой производится отбор сигналов, составляет 20 км.
Количество эхо-сигналов, которые могут быть обработаны в схеме формирования точного кода управления 13, зависит от типа РЛС и в настоящем устройстве составляет 32.
Если интенсивность эхо-сигналов такова, что условие отбора по интенсивности и дальности выполняется, то на выходе схемы 18 формируется сигнал отбора, имеющий уровень логической единицы, который подключается к управляющему входу схемы формирования "точного" кода управления 13 и служит для стробирования сигналов при формировании доплеровских фильтров в схемах 21 и 22. Этот же сигнал поступает на формирователь 19 управления коммутатором 15, представляющий собой логическую схему "И" [4]. На второй вход формирователя 19 поступает сигнал с выхода схемы сравнения доплеровской частоты 20. Схема сравнения 20 представляет собой цифровое пороговое устройство (см.[4]), сигнал логической единицы на выходе которого появляется в том случае, если текущее входное значение Δ=fd-fg-Fд по абсолютной величине меньше порогового значения fn/4. В противном случае на выходе схемы 20 будет сигнал логического нуля. Сигнал логической единицы на выходе формирователя 19 будет только тогда, когда на обоих входах устройства 19 присутствуют сигналы логической единицы, т.е. одновременно выполняются условия отбора эхо-сигналов, по интенсивности и дальности, а также сравнения доплеровской частоты, необходимые для включения "точного" кода управления. В этом случае на выход коммутатора 15 будет проходить "точный" код управления, сформированный в устройстве 13. При невыполнении одного из указанных условий для управления частотой гетеродина 7 будет использоваться "грубый" код управления, сформированный в устройстве 14.
Устройство 14, структурная схема которого приведена на фиг.5, содержит 2 цифровых 12-разрядных параллельно включенных счетчика 29 и 30 (см. [3]), к входам которых подключаются непрерывные периодические последовательности - сигналы гетеродинов 7 и 8. На выходах счетчиков регистрируется 12-разрядный двоичный код, равный значению частоты гетеродина в определенный момент времени, причем цена младшего разряда Δfмл в этом коде определяется временем счета следующим образом:  , Tсч - время счета.
, Tсч - время счета.
Например, при Тсч=0,1 с Δfмл=10 Гц. Оба двоичных кода подключаются к вычитающему цифровому устройству 31, на выходе которого формируется код разности Δ1=fd-fg.
В устройстве 32 вычисляется разность между кодом Δ1 и значением доплеровской частоты Fд, определяемой движением носителя и вращением антенной системы. Величина FД вычисляется в бортовом вычислительном комплексе и равна
где Wx - продольная проекция вектора путевой скорости на луч антенны;
Wz - поперечная проекция вектора, путевой скорости на луч антенны;
λ - длина волны сигнала, излучаемого антенной системой;
β - угол поворота луча антенны относительно строительной оси носителя.
Значения Wx, Wz и β поступают с навигационных систем носителя. Полученная на выходе устройства 32 разность Δ=Δ1-FД представляет собой ошибку рассогласования "грубого" кольца подстройки, т.е. разность между требуемым и действительным значениями регулируемой величины, которая используется для регулирования с помощью обратной связи. Погрешность "грубой" схемы управления определяется двумя факторами: ценой младшего разряда  и динамической погрешностью, связанной с движением антенны, т.е. с тем, что момент регулирования запаздывает по отношению к моменту измерения величины Fд, причем уменьшение Δfмл приведет к увеличению Тсч и, следовательно, к увеличению динамической погрешности. Для конкретной схемы среднеквадратичная погрешность составляет около 20 Гц. Код разности Δ поступает на второй вход коммутатора 15, а также на вход устройства 20, в котором производится сравнение величины Δ с фиксированным пороговым значением
и динамической погрешностью, связанной с движением антенны, т.е. с тем, что момент регулирования запаздывает по отношению к моменту измерения величины Fд, причем уменьшение Δfмл приведет к увеличению Тсч и, следовательно, к увеличению динамической погрешности. Для конкретной схемы среднеквадратичная погрешность составляет около 20 Гц. Код разности Δ поступает на второй вход коммутатора 15, а также на вход устройства 20, в котором производится сравнение величины Δ с фиксированным пороговым значением  .
.
При работе "точной" схемы управления регулирование должно производится в области близких к нулю значений частоты fАЦП (доплеровская частота сигналов на выходе аналого-цифрового преобразователя 12), удовлетворяющих соотношению  .
.
При этом погрешность компенсации будет зависеть от дискретного интервала регулирования ([3]), причем частота fАЦП удовлетворяет соотношению ([2]) fАЦП=fc-fd+fg, где fc - доплеровская частота эхо-сигнала, вызываемая движением носителя PЛC, следовательно, условием, необходимым для работы "точного" кольца, является соотношение  . В силу периодического характера частотных характеристик фильтров (см. фиг.6) при значении доплеровской частоты, большем некоторого граничного значения, область регулирования может быть перенесена из области нулевых доплеровских частот в область
. В силу периодического характера частотных характеристик фильтров (см. фиг.6) при значении доплеровской частоты, большем некоторого граничного значения, область регулирования может быть перенесена из области нулевых доплеровских частот в область  , что приведет к появлению регулярной ошибки компенсации.
, что приведет к появлению регулярной ошибки компенсации.
Т.к. значение частоты повторения для импульсно-доплеровских РЛС составляет, как правило, сотни Гц, то ошибка  является недопустимой. Чтобы установить значение частоты управляемого гетеродина в область, удовлетворяющую неравенству
является недопустимой. Чтобы установить значение частоты управляемого гетеродина в область, удовлетворяющую неравенству  , необходимо кратковременно включить работу "грубой" схемы управления, в результате чего значение частоты управляемого гетеродина будет удовлетворять соотношению fg=fd-Fд, после чего соотношении
, необходимо кратковременно включить работу "грубой" схемы управления, в результате чего значение частоты управляемого гетеродина будет удовлетворять соотношению fg=fd-Fд, после чего соотношении  будет удовлетворяться и произойдет автоматическое включение "точного" кода управления. Полученный на выходе коммутатора 15 управляющий сигнал подключается ко входу цифрового интегратора 33, необходимого для того, чтобы сделать систему автоматического регулирования астатической ([3]), в которой погрешность регулирования не зависит от величины управляющего воздействия. В данном случае управляющим воздействием является значение доплеровской частоты, которое либо поступает извне - при работе "грубого" кольца, либо содержится в самих анализируемых сигналах - при работе "точного" кольца. Интегратор 33 (см. фиг.8) представляет собой (см., например, [4]) многоразрядный накапливающий цифровой сумматор 42, к первым входам А которого подключен выходной сигнал коммутатора 15, а вторые входы В соединены с выходом того же сумматора через регистр 43. Выходной сигнал сумматора через регистр 44 подключен к цифроаналоговому преобразователю 34, в котором формируется напряжение, необходимое для регулировки частоты управляемого гетеродина 7.
будет удовлетворяться и произойдет автоматическое включение "точного" кода управления. Полученный на выходе коммутатора 15 управляющий сигнал подключается ко входу цифрового интегратора 33, необходимого для того, чтобы сделать систему автоматического регулирования астатической ([3]), в которой погрешность регулирования не зависит от величины управляющего воздействия. В данном случае управляющим воздействием является значение доплеровской частоты, которое либо поступает извне - при работе "грубого" кольца, либо содержится в самих анализируемых сигналах - при работе "точного" кольца. Интегратор 33 (см. фиг.8) представляет собой (см., например, [4]) многоразрядный накапливающий цифровой сумматор 42, к первым входам А которого подключен выходной сигнал коммутатора 15, а вторые входы В соединены с выходом того же сумматора через регистр 43. Выходной сигнал сумматора через регистр 44 подключен к цифроаналоговому преобразователю 34, в котором формируется напряжение, необходимое для регулировки частоты управляемого гетеродина 7.
Таким образом, заявляемый объект представляет собой устройство компенсации доплеровской частоты, возникающей в эхо-сигнале вследствие движения носителя импульсно-доплеровской РЛС, работающее в двух режимах - "точной" и "грубой" компенсации, причем в режиме "точной" компенсации погрешность равна 2-4 Гц, т.е. равна погрешности, обеспечиваемой в устройстве по заявке 4520658, а в режиме "грубой" компенсации величина погрешности составляет 20-25 Гц; при этом переключение режимов компенсации происходит автоматически.
Использование изобретения позволяет обеспечить работу устройства компенсации доплеровской частоты эхо-сигнала, вызываемой движением носителя импульсно-доплеровской РЛС, при любом характере отражений от подстилающей поверхности и при всех значениях скорости носителя, при этом исключить недопустимое увеличение погрешности, возникающее при использовании для формирования управляющего напряжения эхо-сигналов с недостаточным отношением сигнал/шум, а также исключить появление регулярной ошибки компенсации, возникающей при смещении области регулирования в область ненулевых доплеровских частот.
Экспериментальная проверка опытного образца заявленного устройства подтвердила указанные результаты.
Для синхронизации работы всех составных частей устройства используются непрерывные временные шкалы и отдельные импульсные сигналы (см. [6]), сформированные в хронизаторе 41 PЛC путем деления промежуточной опорной частоты гетеродина 10. Основная временная шкала имеет период следования импульсов, равный длительности элемента разрешения PЛС; наиболее высокочастотная шкала 10 МГц является опорной при формировании импульсных сигналов управления. Программа составляется в виде импульсных сигналов управления отдельными цифровыми устройствами (сигналы опроса, записи-считывания и т.д.) в соответствии с последовательностью выполнения действий и быстродействием входящих устройств.
Таким образом, использование изобретения позволяет уменьшить погрешность компенсации доплеровской частоты за счет повышения достоверности используемой информации путем предварительного отбора по интенсивности эхо-сигналов, используемых для выделения информации о значении доплеровской частоты, а также путем автоматического подключения дополнительной схемы управления при определенных значениях доплеровской частоты, при которых может возникать недопустимо большая регулярная погрешность.
Источники информации
1. Справочник по радиолокации./Под ред. 14 Сколника. Пер. с англ., т.1,3. - М.: Советское радио, 1976.
2. Устройство компенсации доплеровской частоты, возникающей в эхо-сигналах вследствие движения носителя импульсно-доплеровской РЛС. Махрова Н.Н. и др. Заявка № 4520658 от 25.09.1989 г., кл. G 01 C 13/58.
3. Солодовников В.В. и др. Основы теории и элементы систем автоматического регулирования. - М.: Машиностроение, 1985.
4. Мейдза Ф. Интегральные схемы. Технологии применения. - М.: Мир, 1981.
5. Цыпкин Я.З. Теория иммунных систем. - М.: Государственное издат. физматлитературы, 1958.
6. Гарп Н.Г. Синхронизация в телевидении. - М.: Радио и связь, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ДОППЛЕРОВСКОЙ ЧАСТОТЫ | 1989 |
|
SU1840026A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2710030C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |

Изобретение относится к области радиолокации и может быть использовано в бортовых радиолокационных импульсно-доплеровских комплексах. Техническим результатом является уменьшение погрешности компенсации доплеровской частоты за счет повышения достоверности используемой информации путем предварительного отбора по интенсивности эхо-сигналов, используемых при формировании управляющего напряжения, а также за счет исключения возможности появления регулярной ошибки, возникающей при превышении некоторого порогового значения доплеровской частоты. Устройство содержит первый смеситель, опорный гетеродин, первый фильтр, второй смеситель, второй фильтр, усилитель, устройство формирования управляющего напряжения, управляемый гетеродин, опорный гетеродин, аналого-цифровой преобразователь РЛС, два параллельных канала, каждый из которых содержит доплеровский фильтр, детектор и интегратор, устройство вычитания максимального значения сигналов и их разности, делитель разности интегралов на максимальное значение, цифроаналоговый преобразователь, при этом в устройство введены коммутатор, схема отбора сигналов и управления коммутатором, цифровой интегратор и дополнительная схема формирования грубого кода управления, содержащая два параллельных цифровых многоразрядных счетчика, источник формирования текущего значения доплеровской частоты, схема отбора сигналов и управления коммутатором. 8 ил.
Устройство для компенсации доплеровской частоты, содержащее первый смеситель, один из входов которого подключен к выходу опорного гетеродина РЛС и является сигнальным входом устройства, выход смесителя соединен с последовательно подключенными первым фильтром, соединенным с одним из входов второго смесителя, вторым фильтром и усилителем, выход которого является выходом устройства и одним из входов фазового детектора РЛС, устройство формирования управляющего напряжения, управляемый гетеродин и опорный гетеродин, причем выход управляемого гетеродина соединен со вторым входом первого смесителя, выход опорного гетеродина - со вторым входом второго смесителя, вход устройства формирования управляющего напряжения подключен к выходу аналого-цифрового преобразователя РЛС и является общим входом двух параллельных каналов, каждый из которых содержит последовательно соединенные доплеровский фильтр, детектор и интегратор, при этом выходы каналов подключены к соответствующим входам устройства вычитания максимального значения сигналов и их разности, а выходы устройства соединены с соответствующими входами делителя разности интегралов на максимальное значение, а также содержит преобразователь код - аналог, выход которого является выходом устройства формирования управляющего напряжения и соединен с управляющим входом управляемого гетеродина, отличающееся тем, что, с целью уменьшения погрешности компенсации доплеровской частоты, возникающей в эхосигналах вследствие движения носителя импульсно-доплеровской РЛС, в него введены коммутатор, схема отбора сигналов и управления коммутатором, цифровой интегратор и дополнительная схема формирования грубого кода управления, содержащая два параллельных цифровых многоразрядных счетчика, ко входам которых подключены выходы опорного и управляемого гетеродинов, выходы счетчиков соединены раздельно с устройством вычисления разности частот гетеродинов, выход которого соединен с одним из входов устройства вычисления разности между полученным результатом и текущим значением доплеровской частоты и является выходом устройства формирования грубого кода управления, при этом устройство формирования грубого кода управления имеет вход для подключения источника формирования текущего значения доплеровской частоты, а его выход подключен к первому сигнальному входу коммутатора, а также ко входу схемы отбора сигналов и управления коммутатором, выполненной в виде последовательно соединенных схем сравнения по интенсивности и стробирования по дальности, схемы сравнения доплеровской частоты и формирователя управления коммутатором, вход схемы сравнения по интенсивности служит для подключения к выходу аналого-цифрового преобразователя РЛС, а выход схемы стробирования по дальности подключен к одному из входов формирователя управления коммутатором, ко второму входу которого подключен выходной сигнал схемы сравнения доплеровской частоты, входным сигналом которой является выходной сигнал схемы формирования грубого кода управления, при этом выход схемы стробирования по дальности соединен также с управляющими входами доплеровских фильтров, а выход формирователя управления коммутатором является выходом схемы отбора и управления коммутатором и соединен с управляющим входом коммутатора, выход которого соединен со входом цифрового интегратора, подключенного к цифроаналоговому преобразователю, выход которого подключен к управляющему входу управляемого гетеродина.
| ДУГОВОЙ ШИРИТЕЛЬ для ТКАНИ | 0 |
|
SU319655A1 |

