Изобретение относится к области приборостроения и может быть использовано при создании поплавковых приборов, являющихся чувствительными элементами в системах навигации, ориентации и стабилизации движущихся объектов.
Известны способы уменьшения вредных моментов, действующих на чувствительный элемент поплавкового прибора, заключающиеся в гидростатической разгрузке центрирующих опор (т.е. в компенсации веса чувствительного элемента выталкивающей силой поддерживающей жидкости) и использовании в качестве центрирующих элементов магнитных подвесов, торсионов, прецизионных шарикоподшипников и опор на камнях (см., например, книгу "Гироскопические системы, часть III. Элементы гироскопических приборов", под общей редакцией Д.С.Пельпора, М., 1972, с.255). Однако, ввиду того, что на указанные центрирующие элементы действует остаточный вес чувствительного элемента, обуславливаемый неточностью гидростатирования, а также из-за погрешностей исполнения опор, последние прикладывают к чувствительному элементу вредные моменты, что снижает точность поплавкового прибора.
Известен способ уменьшения вредных моментов, действующих на чувствительный элемент поплавкового интегрирующего гироскопа, заключающийся в гидростатической разгрузке центрирующих камневых опор (см. книгу "Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров" Е.А.Никитина и А.А.Бапашовой, М., 1969, с.105-106).
Известный способ имеет тот недостаток, что между цапфой и втулкой камниевой опоры существует механический контакт. Благодаря этому, из-за наличия остаточного веса и дифферента чувствительного элемента, в опоре возникает момент сил трения, снижающий точность прибора. Кроме того, в процессе раскрутки ротора гиромотора на чувствительный элемент действует реактивный момент, под влиянием которого поплавок отклоняется относительно корпуса прибора в пределах, допускаемых радиальными зазорами в опорах. После прекращения действия реактивного момента чувствительный элемент под влиянием остаточного веса и дифферента начинает возвращаться в исходное положение, при этом из-за трения в опорах, вызываемого этим движением, на поплавок действует вредный момент, временно снижающий точность прибора. Т.к. описываемый процесс благодаря значительному демпфированию движений чувствительного элемента вдоль оси чувствительности (поперечное демпфирование), вокруг нее (поперечно-угловое демпфирование) и вдоль оси подвеса (осевое демпфирование) длителен, то длительно и временное снижение точности прибора, т.е. велико время его точностной готовности.
Целью настоящего изобретения является снижение в течение заданного отрезка времени погрешностей измерения, производимого поплавковым прибором, и уменьшение времени точностной готовности последнего.
Указанная цель достигается тем, что в процессе подготовки поплавкового прибора к измерению входного параметра, центрирование взвешенного в поддерживающей жидкости чувствительного элемента осуществляют известным способом при помощи гидростатически разгруженных опор подвеса. Непосредственно перед началом измерения, когда возмущения, прикладываемые к чувствительному элементу в процессе подготовки прибора к измерению (например, реактивный момент, имеющий место при раскрутке ротора гиромотора), уже отсутствуют, чувствительный элемент освобождают от действия на него центрирующих опор и осуществляют в чистом виде гидростатическую подвеску последнего. При этом центрирование чувствительного элемента в течение заданного отрезка времени обеспечивают за счет демпфирования поддерживающей жидкостью его движений относительно корпуса поплавкового прибора в осевом, поперечном и поперечно-угловом направлениях.
Осуществление чисто гидростатической подвески чувствительного элемента позволяет уничтожить вредные моменты, прикладываемые к нему со стороны центрирующих опор и тем самым снизить погрешности измерения, производимого поплавковым прибором, а также уменьшить время точностной готовности последнего.
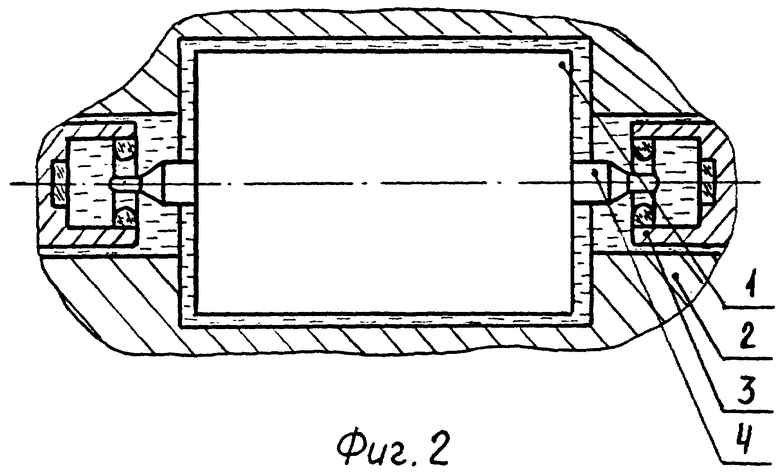
Предложенный способ поясняется схемами. На фиг.1 изображена подвеска чувствительного элемента, которая осуществляет известный способ уменьшения вредных моментов и которая имеет место при подготовке поплавкового прибора к измерению, или при его хранении; на фиг.2 показано положение центрирующего элемента после его освобождения от действия центрирующих опор.
Способ включает в себя следующие операции: до проведения измерения взвешенный в жидкости чувствительный элемент 1 центрируют относительно корпуса 2 при помощи опор 3, которые могут перемещаться в осевом направлении относительно цапф 4 чувствительного элемента и корпуса 2. Непосредственно перед началом измерений опоры 3 сдвигают от чувствительного элемента 1 (например, при помощи электромагнита) и тем самым освобождают его от их действия.
После этого центрирование чувствительного элемента происходит благодаря демпфированию поддерживающей жидкостью его движений относительно корпуса в осевом, поперечном и поперечно-угловом направлениях. Перемещения чувствительного элемента в указанных направлениях можно выразить следующими величинами:
где x, y - перемещения чувствительного элемента в осевом и поперечном направлениях соответственно;
α - угол поворота чувствительного элемента вокруг оси, перпендикулярной оси подвеса чувствительного элемента и проходящей через его центр масс;
Kx, Ky, Kα - коэффициенты демпфирования движений чувствительного элемента в осевом, поперечном и поперечно-угловом направлениях соответственно;
Т - время измерения поплавковым гироскопом или акселерометром входного параметра;
Fx, Fy - силы, действующие на чувствительный элемент в осевом и поперечном направлениях соответственно;
M - момент, действующий на чувствительный элемент вокруг оси, перпендикулярной оси подвеса чувствительного элемента и проходящей через его центр масс.
В случае выполнения чувствительного элемента в форме цилиндра, указанные коэффициенты приближенно можно определить по следующим выражениям:
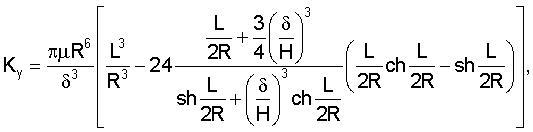
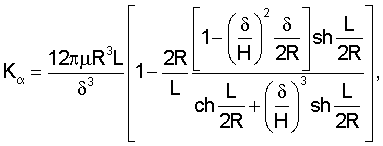
где δ - радиальный зазор между чувствительным элементом и корпусом;
μ - динамическая вязкость поддерживающей жидкости;
R - радиус чувствительного элемента;
L - длина чувствительного элемента;
H - межторцевое расстояние между чувствительным элементом и корпусом.
Согласно приведенным формулам перемещения поплавка при значениях:
δ=0,01 см = 0,0001 м;
μ=0,4 пуаз = 0,04 н.сек/м2;
R=3,61 см = 0,0361 м;
L=9,2 см = 0,0920 м;
Н=0,03 см = 0,0003 м;
Fx=Fy=const=0,5 Г = 4,905·10-3 н;
M=const=2 Г·см=19,62·10-5 н.м;
за время измерения Т=8 мин = 480с составят:
X=1,13 мкм = 1,13·10-6 м
Y=1,00 мкм = 1,00·10-6 м
α=36'' = 0,000176 рад.
Из приведенных расчетов видно, что демпфирование движений чувствительного элемента позволяет осуществить центрирование последнего в течение заданного отрезка времени с приемлемой точностью.
При необходимости, после проведения измерения опоры 3 возвращают в первоначальное положение, при этом, благодаря конической форме цапф 4, чувствительный элемент вновь центрируется опорами подвеса.
Использование предлагаемого способа уменьшения вредных моментов, действующих на чувствительный элемент поплавкового прибора, обеспечивает по сравнению с существующим способом следующие преимущества:
- возможность снижения в течение заданного отрезка времени погрешностей измерения, производимого поплавковым прибором, что особенно важно в инерциальной навигации движущихся объектов;
- уменьшение времени точностной готовности поплавкового прибора;
- устранение расходов на разработку и производство прецизионных опор подвеса чувствительного элемента поплавкового прибора.
Изобретение относится к области приборостроения и может быть использовано при создании поплавковых приборов, являющихся чувствительными элементами в системах навигации, ориентации и стабилизации движущихся объектов. Сущность: способ основан на гидростатической разгрузке центрирующих опор. При этом непосредственно перед началом измерения чувствительный элемент освобождают от действия опор и центрируют вдоль измерительной оси за счет демпфирования движений чувствительного элемента с помощью поддерживающей жидкости. Технический результат: повышение точности измерения. 2 ил.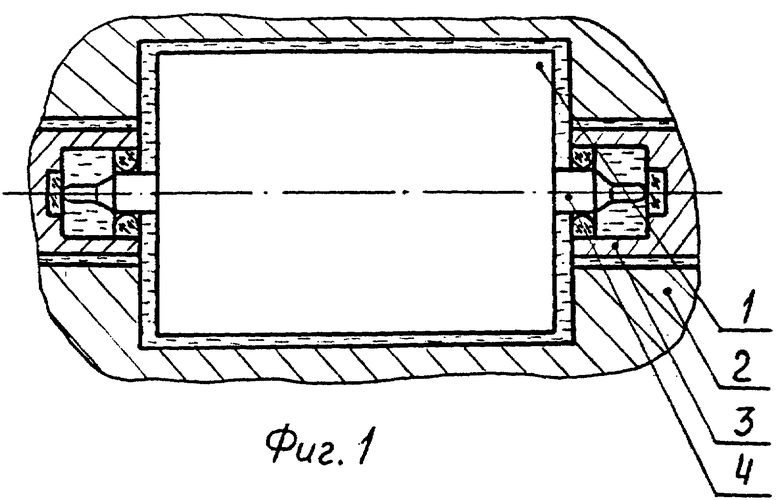
Способ уменьшения вредных моментов, действующих на чувствительный элемент поплавкового прибора, основанный на гидростатической разгрузке центрирующих опор, отличающийся тем, что, с целью повышения точности измерения, непосредственно перед началом измерения чувствительный элемент освобождают от действия опор и центрируют вдоль измерительной оси за счет демпфирования движений чувствительного элемента с помощью поддерживающей жидкости.

