Изобретение относится к приборостроению и может быть использовано при создании поплавковых приборов, например гироскопов и акселерометров для различных систем навигации и ориентации.
Известен способ центрирования чувствительного элемента (ЧЭ) прибора, заключающийся в гидростатической разгрузке центрирующих опор (см. Никитин Е.А. , Шестов С. А. , Матвеев В.А. Гироскопические системы. Элементы гироскопических приборов.- М.: Высшая школа, 1988, с. 209). Указанный способ реализуется поплавковым прибором, содержащим герметичный корпус, герметичный поплавковый узел с заключенным внутри него ЧЭ, поддерживающую жидкость, заполняющую все пространство между внутренней поверхностью корпуса и поплавковым узлом, и опоры, центрирующие поплавковый узел относительно корпуса (например, камневые опоры скольжения) (там же, с. 210). При этом опоры скольжения могут быть цилиндрического, конического и шарового типа (см. Ковалев М. П., Сивоконенко И.М., Явленский К.Н. Опоры приборов.- М.: Машиностроение, 1967, с. 4-35). Однако известные способы и устройства имеют тот недостаток, что из-за наличия остаточного веса и момента дифферента поплавка на оси подвеса возникают вредные моменты, снижающие точность прибора (например, вредный момент трения между цапфами и камневыми подшипниками центрирующих опор).
Известен способ снижения момента трения в камневых центрирующих опорах, согласно которому применяют "оживление" опор, т.е. подшипник приводят в колебательное движение вдоль оси цапфы, за счет чего происходит кажущееся уменьшение трения в направлении поворота цапф в подшипниках, т.е. вокруг оси подвеса (так называемый эффект Жуковского) (см. Гироскопические системы..., с. 222). Известны конструкции поплавкового подвеса, реализующие указанный способ уменьшения момента трения путем размещения подшипников центрирующих опор на электромагнитных, магнитострикционных или пьезоэлектрических вибраторах (см. , например, патент Англии N 931398, кл. 97 (3), 1963 г.). Однако известные способ и устройство имеют тот недостаток, что несмотря на возвратно-поступательное движение камневых подшипников вдоль цапф, механический контакт в опорах по-прежнему сохраняется. В результате вредный момент трения, хотя и уменьшается, но всего в несколько раз (см. Никитин Е.А., Шестов С.А., Матвеев В.А. Гироскопические системы, ч. III. Элементы гироскопических приборов.- М.: Высшая школа, 1972, с. 260), по-прежнему оставаясь источником неприемлемо большой погрешности измерений поплавковым прибором.
Задачей настоящего изобретения является дальнейшее уменьшение вредного момента трения в центрирующих опорах поплавкового подвеса ЧЭ. Для решения поставленной задачи в известном способе центрирования ЧЭ, заключающемся в гидростатической разгрузке опор трения скольжения ЧЭ и создании относительного перемещения контактирующих друг с другом элементов опор, периодически устраняют механический контакт элементов опор для полного освобождения ЧЭ от их воздействия, при этом центрирование ЧЭ осуществляется за счет демпфирования его движения жидкостью, а затем восстанавливают механический контакт в опорах и возвращением элементов опор к исходному положению восстанавливают сцентрированное положение ЧЭ.
В результате устранения механического контакта в опорах и тем самым освобождения ЧЭ от их воздействия момент трения на оси подвеса исчезает. При этом в течение определенного времени сохраняется достаточно точное центрирование ЧЭ благодаря большому демпфированию поддерживающей жидкостью его движения относительно корпуса прибора. Однако с течением времени погрешность центрирования освобожденного ЧЭ нарастает. Поэтому периодически восстанавливают механический контакт в опорах и тем самым их действие на ЧЭ на время, достаточное для возвращения опор (и вместе с ними ЧЭ) к исходному положению, предшествовавшему освобождению ЧЭ. Фактически чередование освобожденного состояния ЧЭ и восстановления его сцентрированного положения представляет собой непрерывный периодичекий процесс, осуществляемый на протяжении всей работы прибора. При этом за счет того, что часть времени механический контакт в опорах полностью отсутствует, происходит резкое уменьшение вредного момента трения на оси подвеса ЧЭ.
Предложенный способ осуществляется следующим устройством. В известном поплавковом приборе, содержащем заполненный жидкостью герметичный корпус, в котором на опорах трения скольжения, состоящих из подшипников и цапф, установлен ЧЭ, причем подшипник каждой опоры расположен на возбудителе продольного возвратно-поступательного движения, размещенном в корпусе прибора, цапфа каждой опоры выполнена в виде тела вращения с диаметром поперечного сечения, плавно уменьшающимся вдоль зоны возвратно-поступательного движения подшипника (например, в виде конуса).
При продольном перемещении подшипника каждой опоры относительно своей цапфы в сторону ее участка с меньшим диаметром поперечного сечения между указанными контактирующими элементами образуется зазор. При этом механический контакт в опорах устраняется, и тем самым ЧЭ освобождается от их действия. С этого момента сцентрированное положение ЧЭ сохраняется за счет большого демпфирования его движения относительно корпуса поддерживающей жидкостью. В процессе последующего возвращения (обратного хода) подшипника к исходному положению происходит восстановление механического контакта в опорах. При этом продольное усилие, развиваемое возбудителями возвратно-поступательного движения, передается на ЧЭ, в том числе и в радиальном направлении за счет плавного нарастания диаметра цапф в направлении обратного хода (например, за счет конической поверхности цапф). В результате в процессе возвращения элементов опор к исходному положению происходит восстановление исходного сцентрированного состояния ЧЭ. Таким образом, при перемещении друг относительно друга контактирующих элементов опор, периодически задаваемом возбудителями возвратно-поступательного движения, непрерывно происходит процесс устранения механического контакта в опорах и полного освобождения ЧЭ с последующим восстановлением сцентрированного положения ЧЭ за счет восстановления контакта в опорах и их возвращения к исходному состоянию. В результате, как уже отмечалось выше, происходит резкое уменьшение момента трения на оси подвеса ЧЭ.
Таким образом, предложенное устройство характеризуется новой совокупностью признаков, а именно наличием гидростатического подвеса ЧЭ, возбудителей периодического возвратно-поступательного движения и цапф в виде тела вращения с плавно уменьшающимся диаметром поперечного сечения вдоль зоны возвратно-поступательного движения, например в виде конуса. При этом достигаемый технический результат, а именно резкое уменьшение момента трения на оси подвеса ЧЭ, обусловлен ранее не известным свойством указанной совокупности периодически обеспечивать полное освобождение ЧЭ от действия центрирующих опор без потери точности центрирования. Каждый из указанных признаков по отдельности или совокупность двух любых из указанных признаков (без третьего) не обладает свойством освобождения ЧЭ от действия опор и тем самым не позволяет получить указанный технический результат.
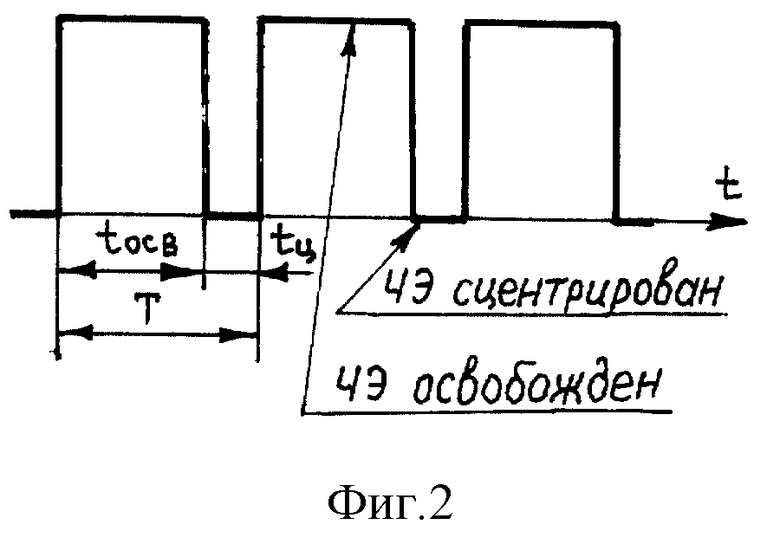
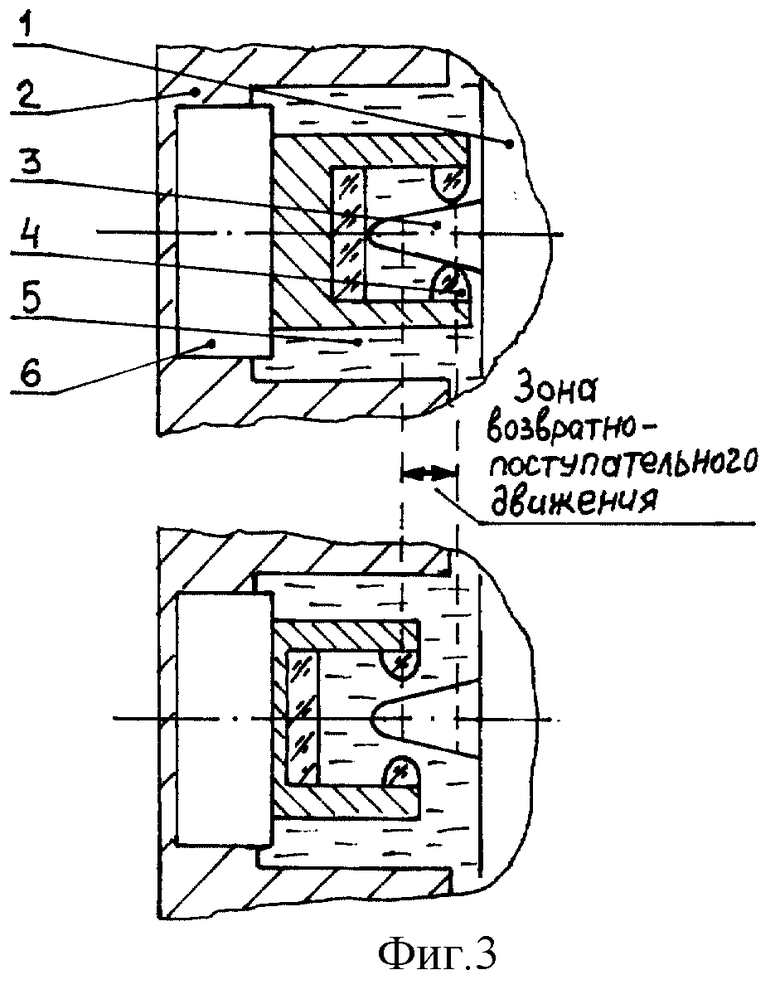
Предложенный способ и устройство для его осуществления поясняются схемами. На фиг. 1 изображен поплавковый прибор с исходным сцентрированным состоянием ЧЭ и этот же прибор с освобожденным состоянием ЧЭ; на фиг. 2 - временная диаграмма периодического освобождения и восстановления центрирования ЧЭ; на фиг. 3 - центрирующая опора с конической цапфой при сцентрированном ЧЭ и эта же опора при освобожденном ЧЭ.
Способ включает в себя следующие операции. В процессе измерений поплавковым прибором освобождают поплавковый ЧЭ 1, расположенный в герметичном корпусе 2, от действия центрирующих опор путем перемещения камневых подшипников 4 вдоль цапф 3 в сторону их участков с меньшим диаметром. После этого в течение времени tосв центрируют ЧЭ 1 за счет большого демпфирования его движения относительно корпуса 2 поддерживающей жидкость 5. При этом сохраняется достаточно высокая точность центрирования. Действительно, в прецизионных поплавковых приборах коэффициент демпфирования Кд радиального перемещения ЧЭ обычно составляет (106-107) г•с/см, а остаточная плавучесть ΔP не превышает 0,2 г. Тогда за время tосв, равное, например 10 с, радиальное перемещение Δr, которое фактически является погрешностью центрирования ЧЭ и определяется по формуле (1)
Δr = (ΔP•tосв)/K∂, (1)
составит всего 0,002-0,02 мкм. Однако с течением времени указанная погрешность нарастает, и, чтобы избежать этого, восстанавливают действие центрирующих опор на время tц, возвращая их к исходному положению. Развиваемое при этом продольное усилие F передается на ЧЭ, в том числе и в радиальном направлении за счет плавного нарастания диаметра цапф в направлении обратного хода. В результате ЧЭ возвращается к своему исходному положению, предшествовавшему освобождению от центрирующих опор. Время tц, необходимое для возвращения ЧЭ, много меньше времени tосв, в течение которого ЧЭ находился в освобожденном состоянии. Действительно, время tц, необходимое для восстановления центрирования ЧЭ, переместившегося в радиальном направлении на величину Δr, определяется по формуле (2)
tц = (Δr•K∂)/(F/tgγ), (2)
где γ - полуугол при вершине сопрягающего конуса и с учетом формулы (1)
Реально продольное усилие при возврате опор в исходное положение достигает нескольких граммов, угол γ может быть достаточно малым, например не превышает 10o, а остаточная плавучесть ΔP, как уже отмечалось, составляет менее 0,2 г. Тогда из (3) следует, что tц много меньше tосв. Процесс освобождения ЧЭ и восстановления центрирования ЧЭ периодически повторяют по циклограмме фиг. 2, при этом большую часть времени ЧЭ находится в освобожденном состоянии, когда механический контакт в центрирующих опорах отсутствует. В результате происходит резкое уменьшение момента трения на оси подвеса.
Устройство для осуществления предложенного способа представляет собой поплавковый прибор, ЧЭ 1 которого расположен в герметичном корпусе 2 на центрирующих опорах в виде цапф 3 и подшипников 4, каждый из которых содержит камневую втулку со сквозным отверстием и камневый подпятник. Цапфы 3 выполнены в виде тела вращения с плавно уменьшающимся диаметром поперечного сечения вдоль зоны возвратно-поступательного движения, например в виде конуса. Внутренняя полость прибора залита вязкой поддерживающей жидкостью 5, обеспечивающей гидростатическую разгрузку центрирующих опор и демпфирование ЧЭ. Подшипники 4 установлены на возбудителях периодического возвратно-поступательного движения 6, размещенных на корпусе 2. Работа устройства понятна из приведенного выше описания способа. Следует заметить, что перемещения, задаваемые возбудителями 6, могут быть достаточно малыми в случае выполнения цапф 3 центрирующих опор в виде, показанном на фиг. 3, т.е. в виде конуса.
Конкретный пример реализации способа и устройства для его осуществления следующий. В поплавковом приборе, заполненном поддерживающей жидкостью типа Д8-06, камневые подшипники с диаметром отверстия камня 0,7 мм были установлены на подпружиненных якорях встроенных электромагнитных возбудителей с ходом 50 мкм. Жесткость пружины якоря составляла 1 г/мкм. Цапфы имели две цилиндрические рабочие поверхности, диаметры которых отличались примерно на 5 мкм и сопрягались по поверхности с конусностью 20o (2γ). В исходном состоянии при обесточенных электромагнитах между элементами центрирующих опор, установленными друг относительно друга с радиальным зазором 2-4 мкм, существует механический контакт, приводящий к появлению вредного момента трения на оси подвеса. Как показывают измерения, момент трения достигает уровня 5•10-5 г•см. Для задания периодического процесса полного освобождения ЧЭ с последующим восстановлением центрирования ЧЭ (путем перемещения камневых втулок с поверхности цапфы большего диаметра на поверхность меньшего диаметра и обратно) встроенные электромагниты с подпружиненными якорями возбуждались генератором импульсов, выходное напряжение которого имело форму, изображенную на фиг. 2. Период следования импульсов T составлял 330 мс, длительность импульсов tосв, соответствующая освобожденному состоянию ЧЭ, - 300 мс, продолжительность паузы между импульсами tц (в течение которой происходит восстановление сцентрированного положения ЧЭ под действием упругих сил, развиваемых подпружиненными якорями при их возвращении к исходному положению) - 30 мс. Как показали измерения, момент трения на оси подвеса снизился до уровня (1-5)•10-7 г•см, т.е. уменьшился по меньшей мере на два порядка.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗГРУЗКИ ОСЕЙ ПОДВЕСА ГИРОСКОПИЧЕСКОГО ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА В ЦЕНТРИРУЮЩИХ ОПОРАХ | 1987 |
|
SU1840254A1 |
| СПОСОБ УМЕНЬШЕНИЯ ВРЕДНЫХ МОМЕНТОВ, ДЕЙСТВУЮЩИХ НА ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ПОПЛАВКОВОГО ПРИБОРА | 1975 |
|
SU1840255A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1983 |
|
SU1840257A1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА (ВАРИАНТЫ) И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2005 |
|
RU2276326C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| Маятниковый компенсационный акселерометр | 1975 |
|
SU1839935A1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1983 |
|
SU1840734A1 |
Изобретение относится к приборостроению и может быть использовано при создании прецизионных поплавковых гироскопов и акселерометров. В процессе измерений устраняют механический контакт в гидростатически разгруженных опорах трения скольжения для полного освобождения чувствительного элемента от их действия. При этом центрирование чувствительного элемента обеспечивается за счет демпфирования поддерживающей жидкостью его движения относительно корпуса прибора. Затем восстанавливают механический контакт в опорах и за счет их возвращения к исходному положению восстанавливают сцентрированное положение чувствительного элемента. Указанные действия периодически повторяются, представляя собой непрерывный процесс, при этом время освобожденного состояния чувствительного элемента составляет большую часть общего времени измерений, в результате чего происходит резкое (на два порядка и более) уменьшение вредного момента трения. В поплавковом приборе, осуществляющем указанный способ, подшипник каждой опоры расположен на возбудителе продольного возвратно-поступательного движения, а цапфа выполнена в виде тела вращения с диаметром поперечного сечения, плавно уменьшающимся вдоль зоны возвратно-поступательного движения подшипника (например, в виде конуса). 2 с. и 1 з.п. ф-лы, 3 ил.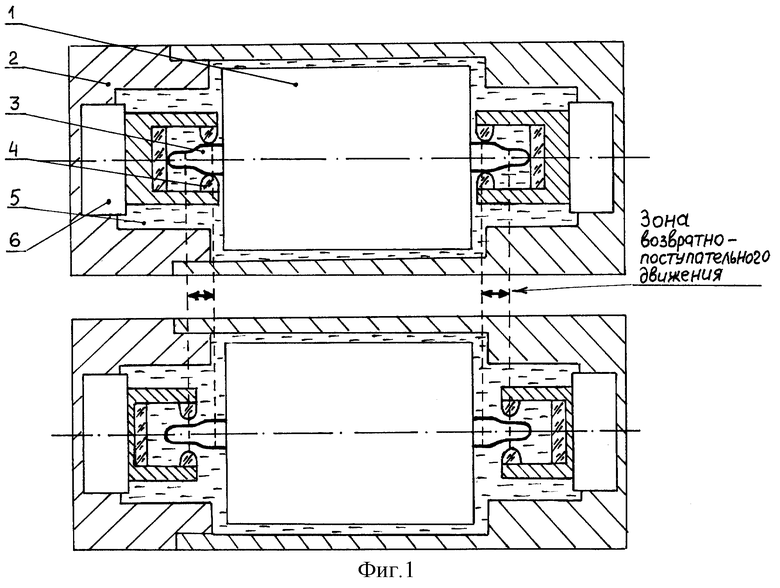
| Жидкостная опора прецизионного прибора | 1975 |
|
SU517790A1 |
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 1988 |
|
RU2023240C1 |
| 0 |
|
SU162669A1 | |
| ПОДВЕС ПОПЛАВКОВЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ ПРИБОРОВ | 1967 |
|
SU216294A1 |
| ДВУСТОРОННИЙ подпятник для ГИРОСКОПИЧЕСКИХПРИБОРОВ | 0 |
|
SU220528A1 |
| US 3530728 A, 29.09.1970 | |||
| СПОСОБ ВОЗБУЖДЕНИЯ ОПОР ТРЕНИЯ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2039995C1 |

