СП
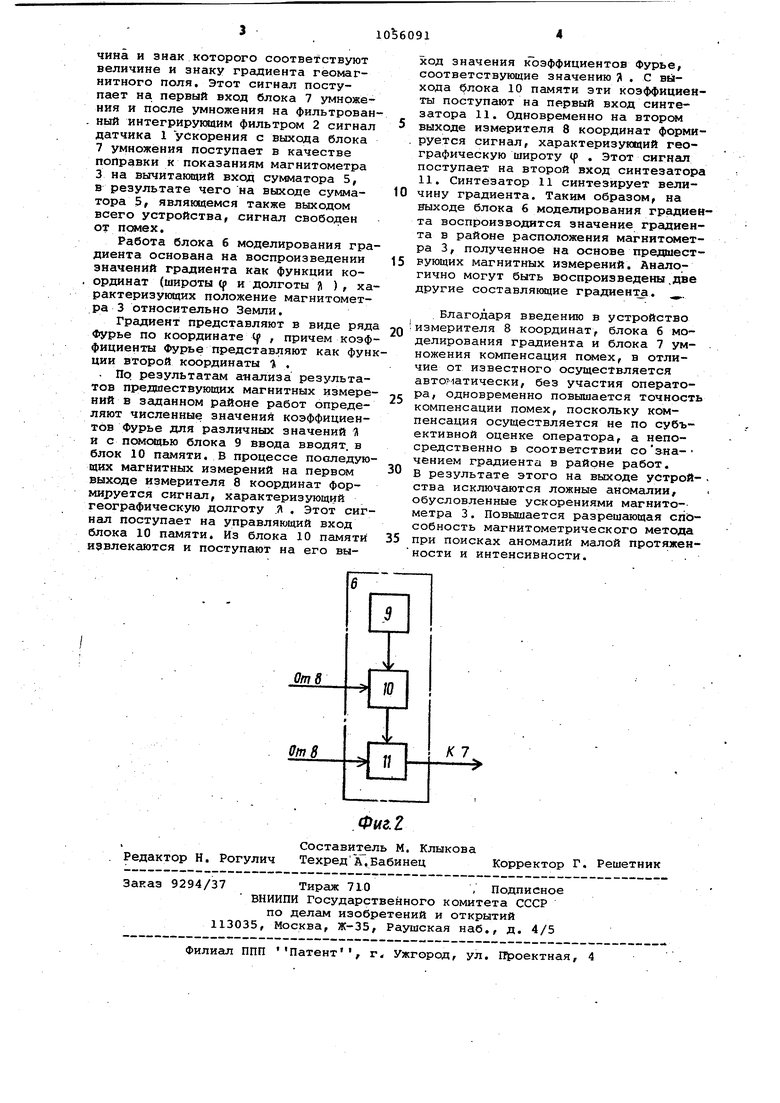
а Изобретение относится к области магнитных измерений и может быть ис пользовано для поисков магнитных аномалий с подвижной платформы. . Известно устройство для магнитны изморений, в котором используется двьжущийся магнитометр f) . Однако неравномерное движение магнитометра при магнитной съемке является источником ложных магнитны аномалий, Наиболее близким к предлагаемому по технической сущности является устройство для магнитных измерений компенсацией помех от ускорений, со держащее последовательно соединенны датчик ускорения и первый фильтр, а также магнитометр, через вторрй фильтр подключенный к сумматору (2j - Однако известное устройство не обеспечивает высокой точности, поскольку масштабный коэффициент, с которым фильтрованный сигнал акселе рометра вводится в качестве поправк на вход сумматора, устанавливается оператором вручную на основе субъек тивной оценки уровня помех, Цель изобретения - повышение точ ности измерений. Поставленная цель достигается тем, что в устройство для магнитных измерений с компенсацией помех от ускорений, содержащее последователь но соединенные датчик ускорения и перйый филы-р, магнитометр, через второй фильтр подключенный к сумматору, дополнительно введены последовательно соединенные блок моделирования градиента и блок умножения, а также измеритель координат, первый и второй выходы которого подключены соответственно к первому и второму входам блока моделирования градиента второй вход блока умножения соединен с выходом первого фильтра, а выход - с вторым«входом сумматора. При этом, блок моделирования градиента содержит последовательно соединенные блок ввода кода, блок памяти и синтезатор, выход которого является выходом блока моделирования градиента, а вторые входы блока памяти и синтезатора - входом блока моделирования градиента. На фиг.1 представлена функциональ ная схема устройства; на фиг,2 функциональная схема блока моделиро йания градиента, Устройство для магнитных измерени с компенсацией помех от ускорений (фиг,) содержит последовательно соединенные датчик 1 ускорения и пер вый фильтр 2, магнитометр 3, через второй фильтр 4,. подключенный к сумматору 5, посутедовательно соединенны блок б моделирования градиента и бло 7 умножения; а также измеритель 8 координат, первый и второй выходы которого подключены соответственно к первому и второму входам блока 6 моделирования градиента, второй вход блока 7 умножения соединен с выходом первого фильтра 2, а выход - с вторым входом сумматора 5, Блок б моделирования градиента (фиг,2) содержит последовательно соединенные блок 9 ввода кода, блок 10памяти и синтезатор 11, выход которого является выходом блока б моделирования градиента, а вторые входы блока 10 памяти и синтезатора 11- выходом блока 6 моделирования градиента. Устройство работает следующим образом, В процессе движения магнитометра 3 на его выходе возникает сигнал, являющийся суммой полезного сигнала и помехи. Полезный сигнал обусловлен геомагнитным полем и его аномалиями. Он соответствует равномерной скорости движения, Помеха обусловлена случайными ускорениями магнитометра 3 в неоднородном магнитном поле под влиянием нестабильности воздушной (морской) среды, тягового усилия и динамики платформы, на которой установлен магнитометр 3, Одновременно с сигналом магнитометра 3 на выходе датчика 1 ускорения формируется сигнал, пропорциональный ускорению магнитометра 3, Помеха на выходе магнитометра 3 и сигнал на выходе датчика 1 ускорения различны, поскольку помеха пропорциональна флуктуации пройденного пути. Сигнал магнитометра 3 после фильтрации вторым фильтром 4, выполненным, например, по схеме дифференцирования, поступает на вход сумматора 5. Сигнал .датчика 1 ускорения после фильтрации фильтром 2, выполненным, например, по схеме интегрирования, поступает на второй вход блока 7 умножения. Помеха на втором .входе блока 7 умножения и сигнал на входе сумматора 5 совпадают по фазе (с точностью до знака градиента магнитного поля). Одновременно с сигналами магнитометра 3 и датчика 1 ускорения на выходе измерителя 8 координат формируются сигналы, характеризующие положение магнитометра 3 в связанной с Землей системе координат, В качестве измерителя 8 координат может использоваться навигационная система носителя магнитометра (система радионавигации, в том числе радиогеодезическая, инерциальная, спутниковая или комплекс навигации «а различных принципах), Сигналы с выхода измерителя 8 координат поступают на входы блока б моделирования градиента. В блоке б моделирования градиента формируется сигнал, величина и знак которого соответствуют величине и знаку градиента геомагнитного поля. Этот сигнал поступает на первый вход блока 7 умножения и после умножения на фильтрованный интегрирукяцим фильтром 2 сигнал датчика 1 ускорения с выхода блока 7 умножения поступает в качестве поправки к показаниям магнитометра 3 на вычитакнций вход сумматора 5, в результате чего на выходе сумматора 5, являющемся также выходом всего устройства, сигнал свободен от помех.
Работа блока 6 моделирования градиента основана на воспроизведении значений градиента как функции координат (широты (р и долготы и ) , характеризующих положение магнитометра 3 относительно Земли.
Градиент представляют в виде ряда Фурье по координате If , причем коэффициенты Фурье представляют как функции второй координаты .
. По результатам анализа результатов предшествующих магнитных измерений в заданном районе работ определяют численные значения коэффициентов Фурье для различных значений и с помощью блока 9 ввода вводят, в блок 10 памяти. В процессе последующих магнитных измерений на первом выходе измерителя 8 координат формируется сигнал, характеризующий географическую долготу .Я . Этот сигнал поступает на управляющий вход блока 10 памяти. Из блока 10 памяти извлекаются и поступают на его выход значения коэффициентов Фурье, соответствующие значению 3 . С вйхода Олока 10 памяти эти коэффициенты поступают на первый вход синтезатора 11. Одновременно на втором выходе измерителя 8 координат формируется сигнал, характеризующий географическую широту tp . Этот сигнал поступает на второй вход синтезатора 11. Синтезатор 11 синтезирует вели0чину градиента. Таким образом, на выходе блока 6 моделирования градиента воспроизводится значение градиента в районе расположения магнитометра 3 , полученное на основе предшест5вующих магнитных измерений. Аналогично могут быть воспроизведены.два другие составляющие градиента. ,.
Благодаря введению в устройство измерителя 8 координат, блока б мо0делирования градиента и блока 7 умножения компенсация помех, в отличие от известного осуществляется автоматически, без участия оператора, одновременно повышается точность
5 компенсации помех, поскольку компенсация осуществляется не по субъективной оценке оператора, а непосредственно в соответствии со эна- чением градиента в районе работ.
0 В результате этого на выходе устройства исключаются ложные аномалии, обусловленные ускорениями магнито-метра 3. Повышается разрешающая способность магнитометрического метода при поисках аномалий малой протяженности и интенсивности.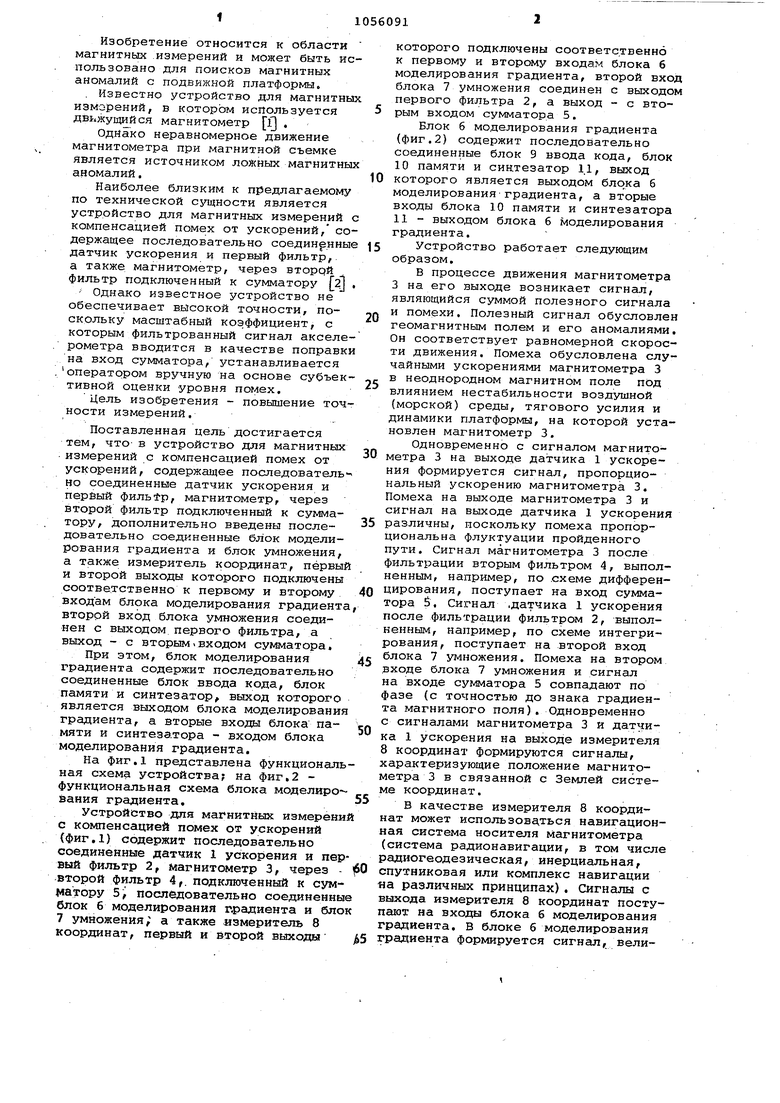
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1983 |
|
SU1840173A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 1985 |
|
SU1840171A1 |
| Автоматический компенсатор магнит-НыХ пОМЕХ | 1979 |
|
SU811179A1 |
| БОРТОВАЯ МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНОЙ ЛОДКИ | 1978 |
|
SU1840306A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| Устройство для определения геомагнитного поля на подвижном носителе | 1989 |
|
SU1666991A1 |
| СПОСОБ СЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ ПОИСКА И РАЗВЕДКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2432588C1 |
| Система автоматического регулирования с компенсацией помех | 1980 |
|
SU941922A1 |
1, УСТРОЙСТЮ ДЛЯ МАГНИТНЫХ ИЗМЕРЕНИЙ С КОМПЕНСА1ЩЕЙ ПОМЕХ ОТ , содержащее последовательно соединенные датчик ускорения и первый фильтр, магнитометр, через второй фильтр подключенный к сумматору, от л и ч а ю щ е е с я тем, что, с целью повышения точности измерений, в него дополнительно введены последовательно соединенные блок моделирования градиента и блок умножения, а также измеритель координат, первый и второй выходы которого подключены соответственно к первому и второму входам блока моделирования градиента, второй вход блока уланожеНИН соединен с выходом первого фильтра, а выход - с вторым входом сумматора . 2.. Устройство по п, 1, о т л ичающееся тем,что блок моделирования градиента содержит последовательно соединенные блок ввода кода, блок памяти и синтезатор, выход которого является выходом блока мо- 1 ,делирования градиента, а вторые вхоО) да блока памяти и синтезатора - входом блока моделирования градиента.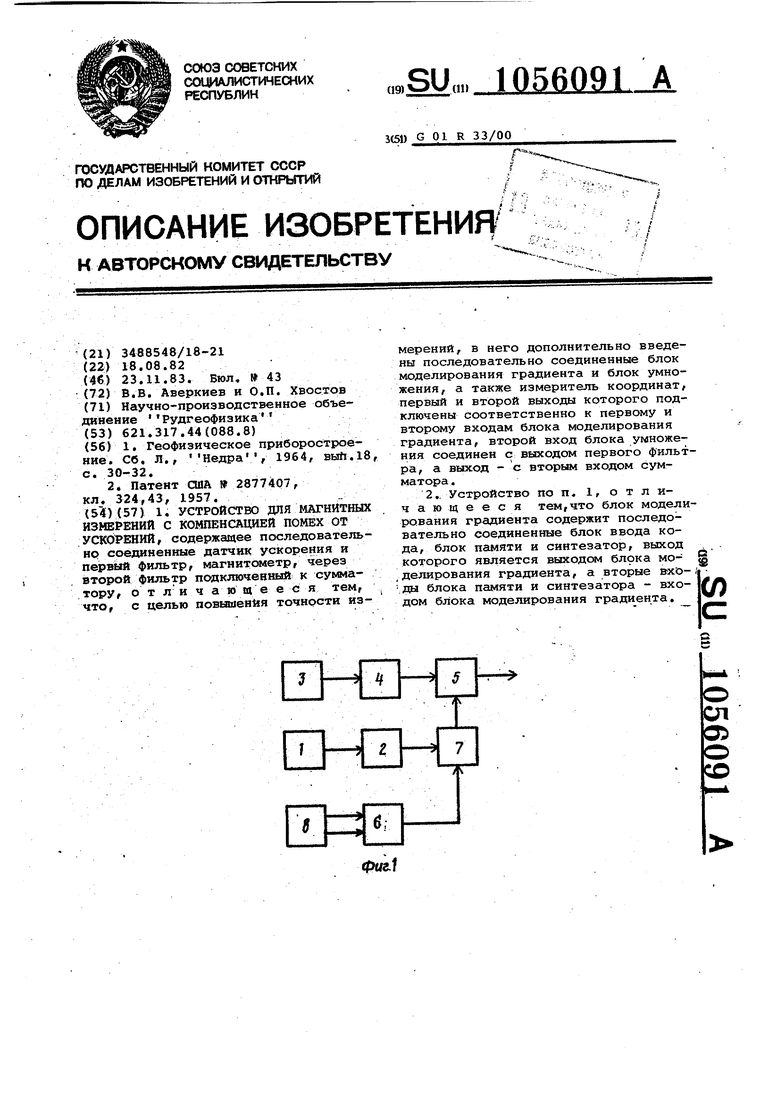
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для заливки свинцом стыковых рельсовых зазоров | 1925 |
|
SU1964A1 |
| Сб | |||
| Л., с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 2877407, кл | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
