Изобретение относится к иекорректируемым ииерциальпым системам управления;
Р1звестеи сиособ повышения точности инерциальной системы управления путем ориентации собственной оси вращения ротора гироскопа но тангажу и выходных осей всех трех дзухстепеииых гироскопов в плоскости траектории, а собственных осей вращепия роторов гироскопов по вращению и рысканию перпендикулярно к плоскости траектории. Погрещности из-за неравножесткости подвесов всех трех гироскопов, из-за дисбалансов масс вдоль входных осей гироскопов по вращению и рысканию сводятся к нулю путем ориентации гироскопов. Однако им свойствеипы погрешности из-за дисбалансов масс вдоль собственных осей вращения роторов гироскоиов по вращению и рысканию и из-за моментов относительно осей прецессии гироскопов, не меняющих ни величину, ни направление.
Известен также способ автокомпенсации погрешностей двухосных гиростабилизаторов путем вращения подвесов гироскопов вокруг собственных осей вращения роторов. Вращением подвесов достигается автокомпенсация погрешности гиростабилизатора из-за моментов относительно осей прецессии гироскоиов, не меняющих ни величииу, ни направление. Однако и этому способу свойственны погрешности из-за дисбалансов масс вдоль собственных осей вращения роторов гироскопов и неравножесткостей подвесов гироскопов.
Предлагаемый способ представляет собой совокупность двух известных способов и, помимо эффектов, присущих им в отдельности, обеспечивает автокомпенсацию погрешностей измерения скорости инерциальной системой управления из-за дисбалансов масс, вдоль собственных осей вбраи1ения роторов гироско0пов по вращению и рыска1нию.
Опшбка измерения скорости иперциальной системой управления в боковом направлении при совокупном применении указагпгых способов определится следуюп1,ей формулой
5
л1/, , j(i/A-i A-)rf.
где Us -среднее арифметическое значение коэффициентов ошибок, характеризую0щих скорости ухода из-за дисбалансов масс вдоль собственных осей вращения роторов гироскопов по вращению и рысканию;
Т - период измерения скорости;
АХ, AZ - компоненты кажущегося ускорения
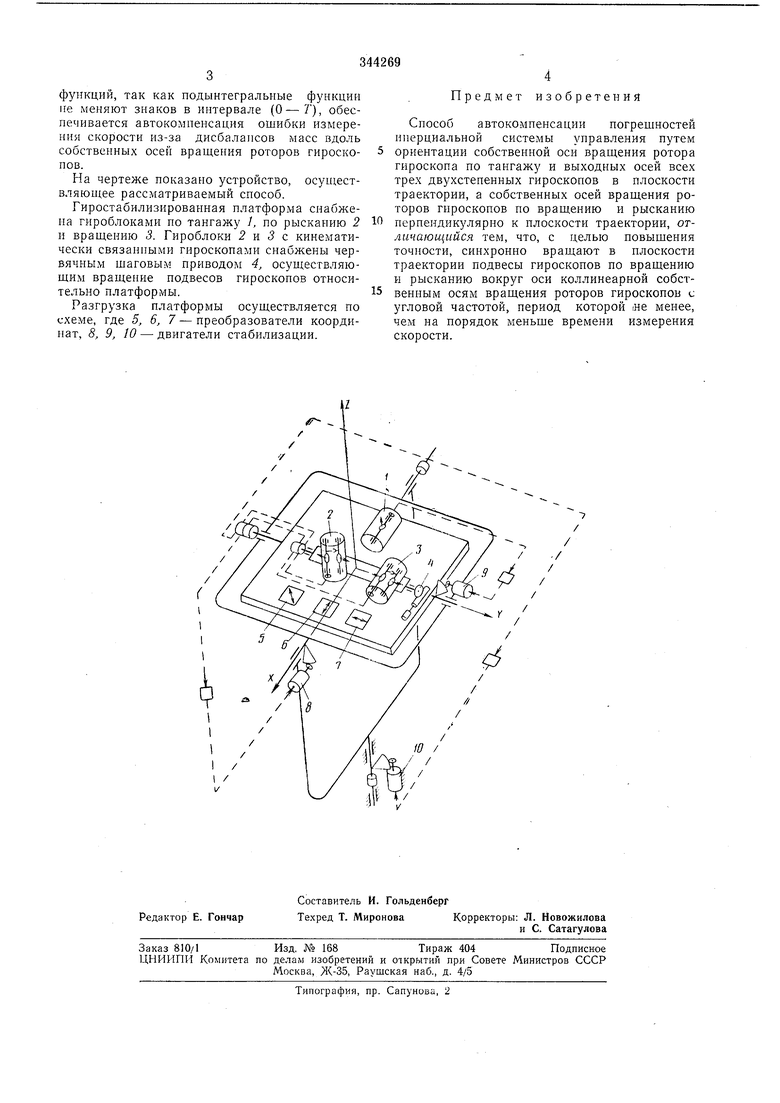
5 объекта вдоль осей X и Z инерциальной системы координат. функций, так как подынтегральные функции ire меняют знаков в интервале (О-7), обеспечивается автокомпенсация ошибки измерения скорости из-за дисбалапсов масс вдоль собственных осей враш,ения роторов гироскопов. На чертеже показано устройство, осуществляюн1,ее рассматриваемый способ. Гиростабилизироваиная платформа снабжена гироблоками но тангажу 1, по рысканию 2 н вращению 3. Гироблоки 2 и 5 с кинематически связаппыми гироскопами снабжены червячным шаговым приводом 4, осуществляющим вращение подвесов гироскопов относительно платформы. Разгрузка платформы осуществляется по схеме, где 5, 6, 7 - преобразователи координат, 8, 9, 10 - двигатели стабилизации. 4 Предмет изобретения Способ автокомпенсации погрешностей ннерциальной системы унравления путем ориентации собственной оси вращения ротора гироскопа по тангажу и выходных осей всех трех двухстепенных гироскопов в плоскости траектории, а собственных осей вращения роторов гироскопов по вращению и рысканию перпендикулярно к плоскости траектории, отличающийся тем, что, с целью повыщения точности, синхронно вращают в плоскости траектории подвесы гироскопов по вращению и рысканию вокруг оси коллинеарной собственным осям вращения роторов гироскопов с угловой частотой, период которой «е менее, чем на порядок меньще времени измерения скорости.