Предлагаемое изобретение относится к технике измерения малых моментов и предназначено для увеличения точности измерения начальной величины паразитного момента (начального момента) акселерометров с электрической силовой обратной связью.
Маятниковые или линейные акселерометры с электрической силовой обратной связью являются одним из наиболее распространенных типов акселерометров, нашедших широкое применение в системах инерциальной навигации.
Одним из основных источников погрешности маятниковых акселерометров этого типа является начальная величина паразитного момента Мнач (или силы Fнач - для линейного акселерометра). Дальнейшие рассуждения ведутся для маятникового акселерометра, однако все они справедливы и для линейного. Начальная величина паразитного момента представляет собой момент, приложенный к подвижной части акселерометра по оси чувствительности при таком положении подвижной части, когда выходной электрический сигнал равен нулю, а также равны нулю все внешние моменты.
Известно несколько способов измерения начального момента (Thomas Evans, Terformance Characteristics and Methods of Testing of Force Feedback Accelerometers, Aeronantical Rescack Council Reports and Memorancla N3601, Ministery of Technology, 1967 г.).
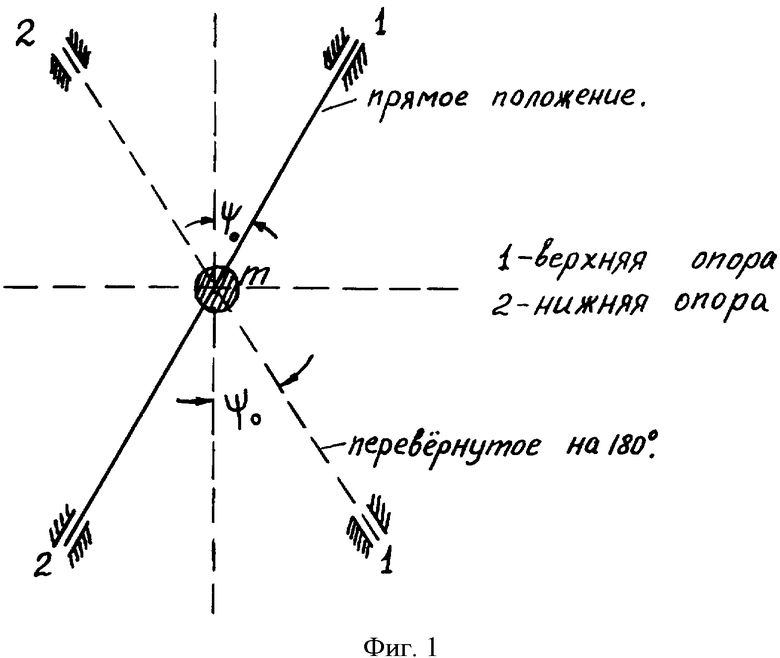
Их общим недостатком является существенное влияние на точность измерения Мнач момента трения в опорах прибора. Покажем это. Обычно основным элементом определения этого момента является его измерение при двух положениях: при прямом и перевернутом точно на 180° положении оси, перпендикулярной оси чувствительности акселерометра. Для маятникового акселерометра - это ось вращения подвижной части. Для этих случаев, как следует из фиг.1, можно записать уравнение моментов, действующих по оси чувствительности при условии точного поворота оси вращения на 180° и вертикальности ее в перпендикулярной плоскости.


где Мнач - начальная величина паразитного момента;
Мψ=mlogsinψ - момент от невертикальности оси вращения маятника по оси чувствительности;
Mтрi - момент трения в опорах прибора.
Складывая уравнения (1) и (2), получаем уравнение для определения Мнач

Поскольку величины Мнач и Мтр для современных акселерометров (не только сухих, но и жидкостных) довольно близки, то из уравнения (3) видно, что момент трения в опорах может составить довольно существенную часть погрешности измерения Мнач.
Структурная блок-схема, в которой обычно производится измерение основных точностных параметров акселерометров, приведена на фиг.2. Выходным сигналом может быть и Uвых (как правило, режим гибкой обратной связи) и Iос (как правило, режим жесткой обратной связи) в зависимости от режима использования акселерометра.
Для названной схемы

Параметры системы выбираются так, чтобы в рабочем диапазоне частот удовлетворялось условие:

Тогда из (4) и (5) следует

или по отношению к моменту, действующему по оси чувствительности,
где Кэм - электромеханический коэффициент датчика момента акселерометра.
Таким образом, измерение момента, действующего на подвижную часть акселерометра, возможно либо в эквивалентном токе (формула (7'), режим жесткой обратной связи, обмотка датчика момента через делитель или непосредственно включена на выход усилителя), либо в эквивалентном напряжении (формула (7), режим движения подвижной части при ступенчатом возмущении определяется видом оператора Кос(р)).
При измерении Мнач по схеме с гибкой обратной связью, т.е. при включении в цепь обратной связи последовательно с обмоткой датчика момента акселерометра емкости Сос (см. фиг.2) Кос(р)≈рСос, из уравнений (4) и (7) можно получить выражение для определения момента М, действующего на подвижную часть акселерометра, с точностью до малых второго порядка, и, переходя сразу от изображений к оригиналам, для ступенчатого возмущения и для нулевых начальных условий записать:

где Δ - относительное демпфирование акселерометра за счет собственного коэффициента затухания 2β:

t - время измерения Uвых с момента перехода с режима жесткой обратной связи на режим гибкой обратной связи.
При выводе формулы (8) апериодическое звено заменено чисто интегрирующим. При этом методическая погрешность составляет

где  - постоянная времени устройства;
- постоянная времени устройства;
Со - крутизна упругого паразитного момента на оси подвижной части акселерометра.
Легко добиться выбором параметров схемы (Кус, Сос), чтобы удовлетворялось условие δм≤0,005.
Из формул (1)-(3) и (8) можно записать

где

U1, U2 - выходное напряжение схемы за время t при прямом и перевернутом на 180° положении акселерометра;
Очевидно, что при данной методике измерения подвижная часть акселерометра перемещается со скоростью, определяемой величиной М.
Целью изобретения является повышение точности измерения начального момента акселерометра при использовании описанного выше способа за счет уменьшения погрешности, вызываемой трением в опорах прибора. Согласно предложенному способу производят измерение начального момента от вертикального положения акселерометра; определяют по полуразности напряжений U1 и U2 необходимый угол наклона по вертикали ψo такой, чтобы знаки выходных напряжений U1 и U2 в прямом и перевернутом на 180° положении оси чувствительности акселерометра были различными, отклоняют ось чувствительности на упомянутый угол и производят повторное измерение начального момента. Скорость подвижной части акселерометра при данном способе измерения Мнач пропорциональна Uвых. Следовательно, скорости подвижной части прибора при измерении М0 и М180 имеют разные знаки (различны знаки U1 и U2). Момент трения всегда направлен против скорости движения, т.е. знаки моментов трения в уравнениях (1) и (2) будут различны. Следовательно, величина ΔМтр, как правило, будет меньше, чем в случае измерения с произвольными и неконтролируемыми знаками U1 и U2.
Изложенная сущность изобретения поясняется фиг.1 и следующими преобразованиями уравнений (1) и (2):


Складывая уравнения (13), (14) и принимая во внимание уравнение (8) и указание о знаках U1 и U2, получаем в уравнении (10) величину составляющей погрешности от трения в опорах

Из уравнений (12) и (15) следует, что в случае Mтр0=Mтр180 ΔМтр=0, т.е. погрешность от трения в опорах существенно уменьшилась для всех случаев, кроме единственного, когда момент трения в одном из положений акселерометра существенно больше, чем в другом положении. В этом случае погрешности от Mтр одинаковы для обоих способов измерения.
Следует отметить, что данный способ уменьшения погрешности измерения Мнач от трения в опорах не может быть реализован при измерении Мнач на жесткой обратной связи, поскольку в этом случае неопределенен знак скорости подхода подвижной части акселерометра к установившемуся положению, соответствующему моменту М.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕПЕРПЕНДИКУЛЯРНОСТИ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839863A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА (ВАРИАНТЫ) | 2013 |
|
RU2533750C1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2488785C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| Способ определения изменения параметров маятникового поплавкового компенсационного акселерометра | 1990 |
|
SU1755205A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
Изобретение относится к технике измерения малых моментов и предназначено для увеличения точности измерения начальной величины паразитного момента (начального момента) акселерометра с электрической силовой обратной связью. Сущность: определение момента тяжения компенсационного акселерометра с гибкой обратной связью осуществляют путем поворота его оси чувствительности на 180°, предварительно наклоняя ось чувствительности относительно плоскости горизонта на угол, превышающий порог чувствительности акселерометра. Технический результат: ослабление влияния момента трения на результат измерений. 2 ил.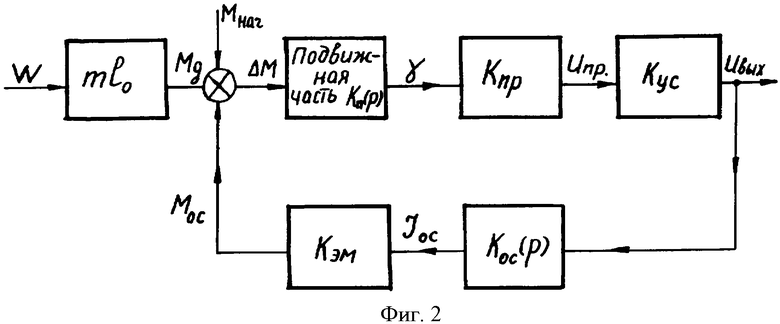
Способ определения момента тяжения компенсационного акселерометра с гибкой обратной связью путем поворота его оси чувствительности на 180°, отличающийся тем, что, с целью ослабления влияния момента трения на результат измерений, предварительно наклоняют ось чувствительности относительно плоскости горизонта на угол, превышающий порог чувствительности акселерометра.

