Изобретение относится к измерителям ускорения, применяемым в инерциальных системах управления летательных аппаратов.
Компенсационные маятниковые акселерометры с электрической обратной связью позволяют получить наибольшую точность измерения ускорения при малых габаритах и весе приборов.
Для введения различных поправок и сокращения времени предстартовой подготовки в системах управления дальностью МБР применяются цифровые вычислительные машины.
При использовании компенсационного акселерометра совместно с Ц.В.М. появляется необходимость преобразования линейной выходной величины акселерометра (обычно тока) в последовательности импульсов, частота следования которых строго пропорциональна измеряемому ускорению.
Уже известны различные способы преобразования линейной выходной величины (тока) компенсационного акселерометра в дискретную. Наиболее интересные из них следующие.
1. Использование интегрирующего привода с прецизионным тахогенератором (Григорьев Л.П., авт.св. №128161, кл. 42 d 10).
2. Использование интегрирующего усилителя со сбросом. ("Electronech Design" 1961 г. S №3 р. 14÷16).
3. Преобразователь с использованием эталонной емкости, заряженной до эталонного уровня напряжения и разряжающейся на обмотку обр. связи акселерометра. м. №К-700 (Space aeronautics V34 №4 X - 1960 г. p.228÷232.
4. Преобразователь с периодическим подключением к обмотке обратной связи акселерометра источника эталонного тока на эталонное время.
(там же)
Недостатком преобразователя первого типа является его сложность и трудность получения точности более 0,05%. С помощью преобразователя второго типа можно получить высокую точность (порядка 0,01%). Однако для получения такой точности необходим операционный усилитель с малым уходом нуля, создание которого является отдельной сложной задачей.
С помощью преобразователя третьего типа можно получить точность, не превышающую 0,1%.
Наиболее совершенной является четвертый тип преобразователя. Однако эта схема обладает следующими существенными недостатками.
1. Схема неудовлетворительно работает при ускорениях, близких к нулю.
2. Источник эталонного тока должен обладать значительной мощностью (такой источник трудно осуществить).
3. В силу неидеальности источника тока на величину произведения оказывает влияние изменение постоянной времени обмотки обратной связи.
Указанные недостатки ограничивают возможность применения указанной схемы.
Предлагается схема преобразователя тока обратной связи компенсационного акселерометра в частоту, свободная от указанных недостатков и позволяющая получить точность порядка 0,01%.
Блок-схема предлагаемого преобразователя показана на чертеже. Она состоит из следующих элементов: акселерометра с обратной связью (1); усилителя цепи обратной связи (2); транзисторных реле (3, 4), срабатывающих при определенном (положительном или отрицательном в зависимости от знака ускорения) уровне напряжения на конденсаторе С; двух источников опорного напряжения (5, 6); логического устройства (7); транзисторных токовых ключей (8) и источника эталонного тока (9).
Схема работает следующим образом.
При наличии составляющей ускорения, направленной вдоль оси чувствительности акселерометра, по обмотке обратной связи потечет ток, создающий момент, уравновешивающий момент, создаваемый ускорением. Напряжение на емкости будет нарастать по закону.

Как известно, ток в обмотке обратной связи с большой степенью точности пропорционален ускорению

Скорость, приобретенная ракетой, определяется следующим уравнением

Q - количество электричества.
Таким образом, скорость ракеты пропорциональна количеству электричества, протекшему через обмотку обратной связи.
Как только напряжение на емкости превысит величину напряжения на опорном источнике Uo, сработает реле и подаст сигнал в логическое устройство, которое осуществит с помощью транзисторных ключей подключение эталонного источника тока к емкости на эталонное время. При этом напряжение на емкости уменьшится. После отключения эталонного источника от емкости напряжение на ней снова будет нарастать и при Uc>Uo реле вновь сработает. В дальнейшем процессы будут повторяться. Очевидно, что для нормальной работы схемы, эталонный ток должен превышать ток, соответствующий максимальному ускорению.
Подключение эталонного источника тока к емкости на эталонное время эквивалентно сообщению емкости заряда qэ
qэ=iэ·tэ
Поскольку напряжение на емкости ограничено напряжением срабатывания реле, количество электричества, отданного эталонным источником (утечкой емкости пренебрегаем), равно
Q=n·qэ
n - число эталонных импульсов.
Таким образом, число эталонных импульсов определяет скорость движения ракеты. (В случае воздействия на ракету как положительного, так и отрицательного ускорения, результирующая скорость пропорциональна разности положительных и отрицательных эталонных импульсов). Будет иметь место ошибка дискретности, однако при надлежащем выборе qэ ее величина может быть сделана пренебрежимо малой.
Очевидно, что точность работы преобразователя не зависит от изменения величины емкости "С" и изменения напряжения срабатывания реле.
Формула для частоты следования эталонных импульсов имеет следующий вид

Собственная ошибка преобразователя складывается из следующих величин:
1) нестабильности величины qэ;
2) утечки емкости С;
3) утечки тока через реле в моменты, когда напряжение на емкости превышает опорное напряжение;
4) утечки транзисторных ключей.
При использовании кварцевого генератора для выработки tэ и усилителя постоянного тока, охваченного глубокой обратной связью по току в качестве источника эталонного тока, результирующая ошибка преобразователя будет иметь значение порядка 0,01% за 10 минут.
Основное отличие предлагаемой схемы от схемы с подачей эталонного импульса тока в обмотку обратной связи заключается в том, что в предлагаемой схеме цепь обратной связи постоянно замкнута, а эталонные импульсы тока подаются не в обмотку обратной связи, а на емкость, включенную в разрыв цепи обратной связи.
Указанное изменение схемы преобразователя позволяет получить следующие преимущества:
1) ток в обмотке обратной связи безразрывен, поэтому схема стабильно работает при малых значениях ускорения;
2) мощность эталонного источника тока может быть снижена в 10 и более раз по сравнению с противопоставляемой схемой;
3) изменение постоянной времени обмотки обратной связи акселерометра не оказывает влияния на точность работы преобразователя.
Предлагаемый акселерометр с частотным выходом может найти применение в системах управления МБР и инерциальных системах самолетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Маятниковый компенсационный акселерометр с частотным выходом | 1968 |
|
SU1839837A1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ЧАСТОТНЫМ ВЫХОДОМ | 1973 |
|
SU1839862A2 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР С ЧАСТОТНЫМ ВЫХОДОМ | 1978 |
|
SU1839896A2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ | 1985 |
|
SU1839979A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2014 |
|
RU2555215C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ОПОР ТРЕНИЯ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2039995C1 |
Компенсационный маятниковый акселерометр с частотным выходом содержит усилитель цепи обратной связи, источники опорного напряжения, транзисторные реле, логический блок и источник эталонного тока. В цепь обратной связи акселерометра включен конденсатор, эталонные импульсы в который подаются через транзисторные ключи, управляемые полупроводниковыми реле, подключенными параллельно конденсатору через источники опорного напряжения. Технический результат - повышение точности и уменьшения мощности эталонного источника тока. 1 ил.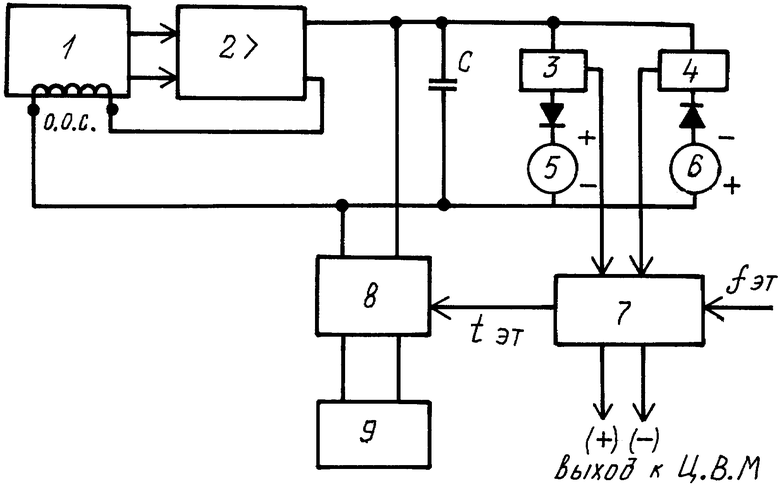
Компенсационный маятниковый акселерометр с частотным выходом, содержащий усилитель цепи образной связи, источники опорного напряжения, транзисторные реле, логический блок и источник эталонного тока, отличающийся тем, что, с целью повышения точности и уменьшения мощности эталонного источника тока, в цепь обратной связи акселерометра включен конденсатор, эталонные импульсы в который подаются через транзисторные ключи, управляемые полупроводниковыми реле, подключенными параллельно конденсатору через источники опорного напряжения.

