1
Изобретение относится к электрогидравлическим следящим системам общего назиачения, в которых гидродвигатели (силовые цилиидры, неиолноповоротные квадранты н др.) имеют рабочие полости с переменным в процессе работы объемом.
Известна электрогидравлическая следящая система с асимметричным гидроприводом, содержащая датчики положеиия и скорости задающего и исиолиительного валов, сумматоры, подключениые соответствеппо к их выходам, причем выход первого сумматора соединен со входом электронного усилителя, связаниого с последовательно включенными гидроусилителем, исполнительным механизмом перемеииой производительпости и гидродвигателем. Однако в таких ЭГСС, особенно при значительных объемах рабочих полостей гидроцилиидров, колебательность системы при различных положениях поршня переменна, что может привести к автоколебаниям или измеиеиню качества работы ЭГСС.
Если объект унравлеиии находится в среднем положении, то колебательность гидропривода будет наибольщей. При неремещенни объекта уиравлеипя в крайнее положеиие степень демпфирования гидроиривода увеличится. Изменение колебательности происходит из-за изменения объема рабочей жидкости в полостях асимметричного гидропривода.
Предложена ЭГСС, отличающаяся тем, что, с целью улучпюиия динамических характеристик системы, оиа содержит второй датчик положения исполнительного вала и соедипенный с ним через второй сумматор блок переменного коэффициента силепия, выход которого подключен ко входу электронного усилителя.
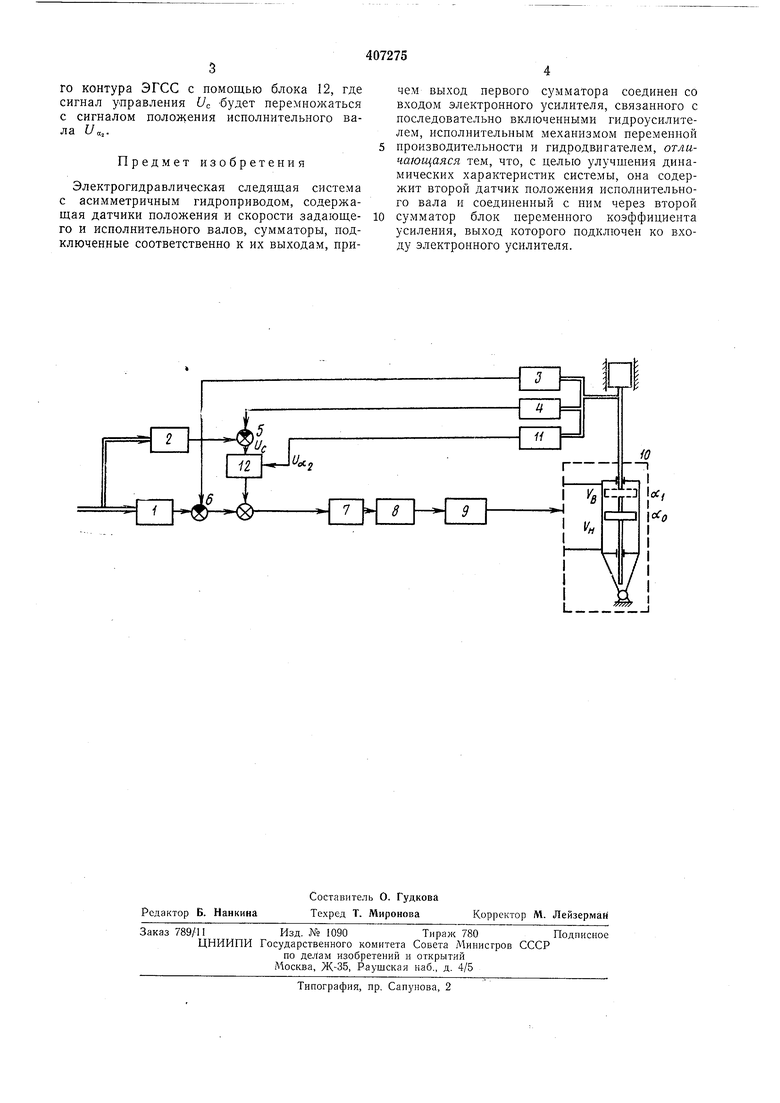
На чертеже показана функциональная схема ЭГСС с асимметричным гндроприводом. Предлагаемая ЭГСС состоит из датчиков положения 1 и скорости 2 задающего 3 и исполнительного валов 4 и сумматоров 5 и 6, электронного усилителя 7, гидроусилителя 8,
иснолнительпого механизма 9 переменной производительности и гидродвигателя 10. Для изменения коэффициента усиления ЭГСС на исполнительном валу гидродвигателя 10 устаиовлеп второй датчик положения 11, а его
выход подключен к блоку 12 перемениого коэффициента усиления, введенного в канал унравлення системы по снгналу, нропорциональному скоростн иснолнительного вала.
При работе ЭГСС при изменении положепня нагрузки и, следовательно, но.ршня и объемов жидкости в рабочих полостях в гидроприводе УП и V,, будут меняться колебательные свойства гидропривода. При этом сигнал с датчика положения 11 выходиого вала будет менять коэффициент усиления внутреннего контура ЭГСС с помощью блока 12, где сигнал управления Uc будет перемножаться с сигналом положения исполнительного вала и oi,.
Предмет изобретения
Электрогидравлическая следящая система с асимметричным гидроприводом, содержащая датчики положения и скорости задающего и исполнительного валов, сумматоры, подключенные соответственно к их выходам, причем выход первого сумматора соединен со входом электронного усилителя, связанного с последовательно включенными гидроусилителем, исполнительным механизмом переменной производительности и гидродвигателем, отличающаяся тем, что, с целью улучшения динамических характеристик системы, она содержит второй датчик положения исполнительного вала и соединенный с ним через второй сумматор блок неременного коэффициента усиления, выход которого подключен ко входу электронного усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЁКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407274A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА РАЗДЕЛЬНОГО ТИПА | 1966 |
|
SU184577A1 |
| Электрогидравлическая следящая система | 1974 |
|
SU590495A1 |
| ОБЪЕДИНЕННАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU347753A1 |
| Система гидроприводов дроссельного регулирования | 1983 |
|
SU1155991A1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| ОБЪЕДИНЕННАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ,, СЛЕДЯЩАЯ СИСТЕМАi | 1972 |
|
SU332256A1 |
