Известна система управления гидравлическим прессом, включающая золотник управления, подключенный в магистраль системы, и дозирующий цилиндр, соединенный с магистралью низкого давления.
Предлагаемая система управления гидравлическим прессом отличается от известной тем, что она снабжена реечным механизмом, жестко связанным с золотником унравления и имеющим замкнутую гидравлическую связь с дозирующим цилиндром и выполненным в виде соединенных между собой шестерней взаимно параллельных реек, одна из которых жестко связана с плунжером нресса, а другая, снабженная цилиндрической полостью, имеет возмолчиосгь свободно перемещаться по неподвижному порщню с двухсторонним штоком. Такое выполнение системы позволяет обеспечить копирование движения руки оператора, а также переход без останова пресса на автоматический цикл с заданной величиной возвратно-поступательного движения бойка.
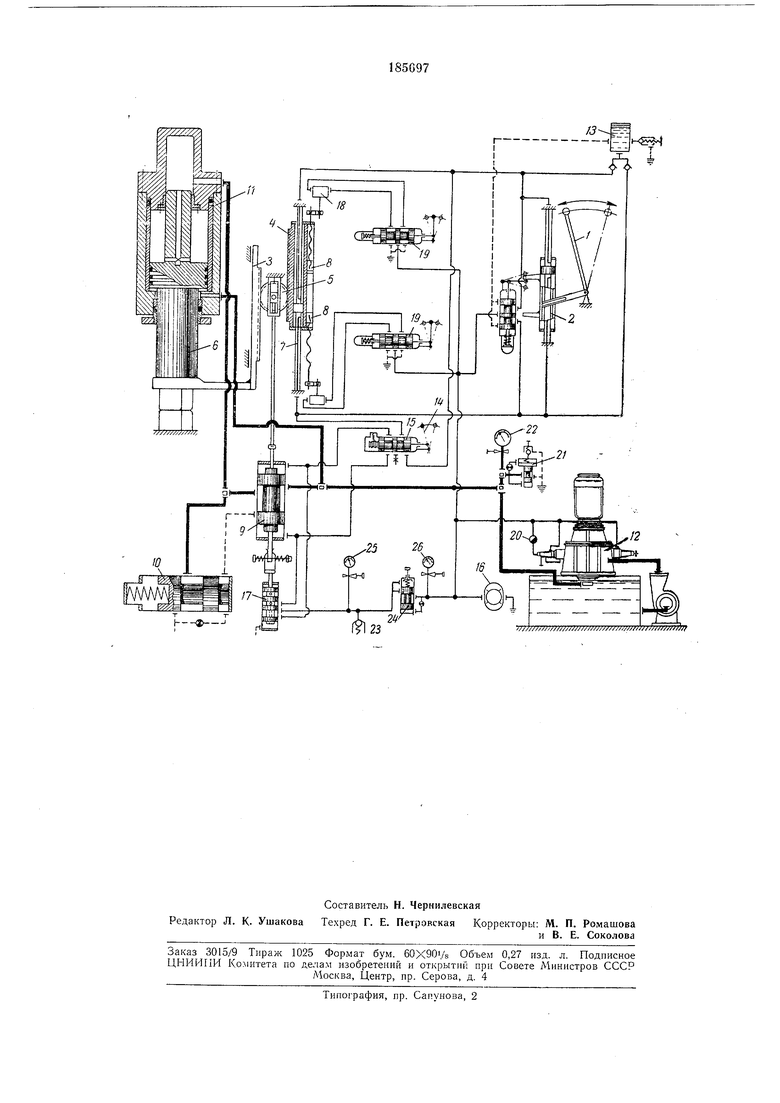
На чертеже показана схема системы управления гидравлическим прессом.
а) Работа системы управления гидравлическим прессом на ручном режиме.
через сверления в штоке выжимается в верхнюю или нижнюю полости реечного механизма, состоящего из двух взаимно параллельных реек 3 н 4, связанных между собой шестерней 5. Рейка 3 жестко соединена с плунжером 6 пресса, а рейка 4, снабженная цилиндрической полостью, имеет возможность свободно перемещаться по неподвил ному поршню 7 с двухсторонним штоком при по0 мощи винтового механизма 8.
Перемещение рейки 4 вызывает перемещение штока золотника 9 управления, который соединяет с давлением или со сливом (через золотник W) верхнюю полость рабочего цилиндра 11. Штоковая полость последнего постоянно сообщается с насосом 12. Перемещение плунл ера рабочего цилиндра 11 пресса вызывает перемещение рейки 3 реечного механизма, которая приводит золотник 9 в ис0 ходное положение.
Если скорость перемещения реек 3 и 4 одинакова, то золотник 9, будучи открытым, удерживается в этом состоянии до тех пор,
5 пока не прекратится перемещение рейки 4. При остановке рейки 4 золотник 9 закрывается ходом пресса, перемещение рейки 4 в обратном направлении вызывает обратное перемещение плунжера рабочего цилиндра 11 ной связи ползун пресса копирует перемещение рукоятки / но скорости и направлению. Для компенсации утечек в цилиндре 2 в гидравлической нолости рейки 4 реечного механизма предусмотрен нодпиточный бачок 13. б) Работа системы управления на автоматических шлихтовочных ходах. Перевод пресса на автоматические шлихтовочные движения осуществляется на ходу. Для этого рукоятку управления 14 золотника 15 переводят в ноложение «автомат, при этом полости цилиндра 2 и рейки 4 реечного механизма через золотник 15 будут соединены между собой, а цилиндр рейки 4 реечного механизма будет свободно перемещаться винтовым механизмом 8. Для фиксирования золотника 9 в конечных положениях в молгенты хода пресса под его торцы периодически подают давление от лопастного насоса 16 через вспомогательный золотник 17, фрикционно связанный со щтоком золотника 9. Уноры винтового механизма 8 устанавливают на заданные размеры нри помощи гидромоторов 18, управляемых трехпозицнонными золотниками 19 с пульта. Привод нресса осуществляется от насоса 12 переменной нроизводительностн, которую изменяют дросселем 20. Давление в рабочей магистрали регулируют клананом 21, а контролируют манометром 22. Давление в магистралях системы унравления регулируют клапанами 23 и 24, а контролируют манометрами 25 к 26. Предмет изобретения Система управления гидравлическим прессом, включающая золотник управления, подключенный в магистраль системы, и дозирующий цилиндр, подключенный к магистрали низкого давления, отличающаяся тем, что, с целью обеспечения копирования движения руки оператора и перехода без останова пресса на автоматический цикл с заданной величиной возвратно-поступательного движения бойка, система унравления снабжена реечным механизмом, жестко связанным с золотником управления и имеющим замкнутую гидравлическую связь с дозирующим цилиндром и выполненным Б виде соединенных между собой щестерней взаимно параллельных реек, одна из которых жестко соединена с плунжером пресса, а другая, снабженная цилиндрической полостью, имеет возможность свободного перемещения по неподвижному порщню с двухсторонним щтоком.
| название | год | авторы | номер документа |
|---|---|---|---|
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМИПРЕССАМИ | 1966 |
|
SU180088A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| Гидравлический пресс для калибровки трубчатых заготовок | 1975 |
|
SU548441A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДАЧИi2 | 1973 |
|
SU406699A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| Система управления гидравлическим прессом | 1974 |
|
SU518380A1 |
| Следящий привод | 1986 |
|
SU1380932A1 |
| Система управления гидравлическим прессом | 1982 |
|
SU1141019A1 |
| Устройство для вулканизации резинового низа обуви | 1981 |
|
SU1028524A1 |