ключей через промежуточное запоминающее устройство к первому входу операТпвного запоминающего устройства , первый выход которого соединен с первым входом пеового индикатора, второй выход - с -первым входом второго устройства управления, третий выход и второй вход - соответственно с первым входом и выходом третьего устройства управления, а четвертый выход и третий вход - соответственно с первьлми ВХОДОМ и выходом корректирующего устройства, второй вход которого подключен к выходу задатчика коррекции, а третий вход - к четвертому входу оперативного запоминающего устройства, первом входу четвертого устройства управления и к первому выходу интерполятора, второй выход которого соединен со вторым входом первого индикатора, третий выход - с первым входом устройства обнаружения ошибок и со входом коммутатора, а вход интерполятора - с пятым выходом.оперативного запоминающего устройства, пятый вход которого соединен с выходом первого задатчика координат, и с первым входом измерителя координат, выход которого подключен ко входу второго индикатора, второй-выход первого дешифратора соединен со входом устройства установки в исходное положение, подкл оченного выходом к первому входу первого устройства управления, второй вход которого соединен с третьим выходом первого дешифратора, третий вход - с выходом задатчика номера кадра программы, а четвертый вход со вторым выходом промежуточного запоминающего устройства, выход второго задатчика координат подключен к шестому входу оперативного запоминающего устройства, введены второй дешифратор, регистр, первый компаратор, блок фиксации положен-ия объекта пятое устройство управления и второй компаратор, выход которого подключен к первому входу блока фиксации положения объекта и первому входу пятого устройства управления, первый вход - к выходу четвертого устройств управления, второй вход - к первому выходу регистра, а третий вход - к первому выходу первого компаратора, Лервый вход которого соединен с шес.гым выходом оперативного запоминающего устройства, второй вход - со вторым выходом измерителя координат, а второй выход - со вторым входом устройства обнаружения ошибок, выход которого подключен ко второму входу пятого устройства управления, третий вход которого подключен к выходу блока фиксации положения объекта и пятому входу первого устройства управления, шестой вход и второй выход которого соединены соответственно с первым выходом и
четвертым входом пятого олока управления, второй выход и пятый вход которого подключены сое тственнс -0 вторым входу и выходу второго усройства управления р третий выход и шестой вход - соо.вч...ч;твенно ко вторым входу и выходу третьего устройства управления, четвертый выход пятого устройства управления соединен со вторым входом четвертого устройства управления, седьмой вход с четвертым выходом интерполятора, а восьмой вход - со вторым выходом регистра, первый вход которого чере второй дешифратор подключен к выходу реверсивного считывающего устройства, а третий выход - ко втором входу блока фиксации положения объекта и седьмому входу первого устройства управления.
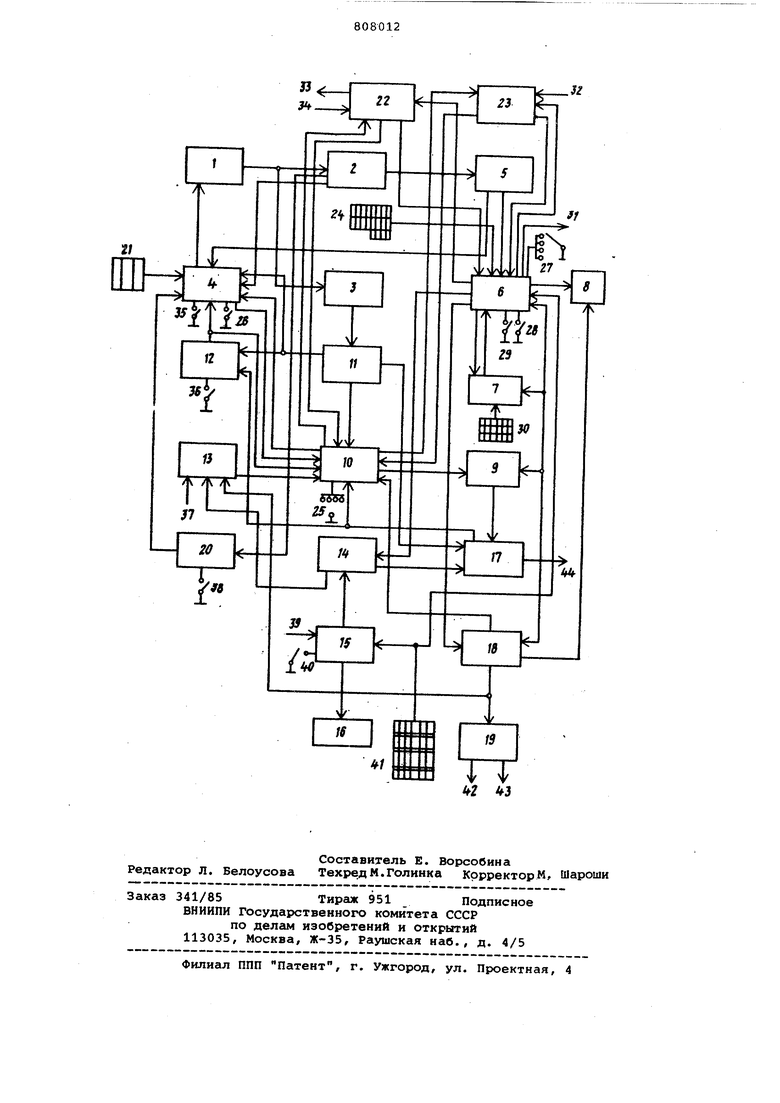
Блок-схема системы представлена на чертеже.
Система состоит из следующих блоков: реверсивного считывающего устройства 1, первого 2 и второго 3 дешифратора ОВ, первого устройства 4 управления, промежуточного 5 и оперативного 6 запоминающих устройств, корректирующего устройства 7, первого индикатора 8, четвертого устройства 9 управления, пятого устройства 10 управления, регистра 11, блока 12 фиксации положения объекта, устройства 13 обнаружения ошибок, первого компаратора 14, измерителя 15 координат, второго индикатора 16, второго компаратора 17, интерполятора 18, коммутатора 19, устройства 20 установки в исходное состояние, задатчика 21 номера кадра программы второго устройства 22 управления третьего устройства 23 управления, второго задатчика 24 координат, переключателя 25 вида работ, переклчателя 26 перемотки ленты, переключателя 27 адреса, кнопки 28 ручной записи, переключателя 29 важности функции М 01, задатчика 30 коррекции, входа 31 к подгоночноуправляющей системе, входа 32 с конечных выключателей в оси Z, выхода управления заменой электродаинструмента 33, входов с ьыключателей, кодирующих номер электрода-инструмента 34, кнопки, включающей автоматический поиск и чтение блока информации с номером N 35, переключателя 36 фиксации прложения объекта, входов с конечных выключателей в осях X и У 37, переключатля гашения блока 38 программы,вход от измерительного датчика 39 коордиты Z, кнопки 40 записи координаты Z первого задатчика 41 координат 41, выходов 42 и 43 к шаговым двигателям,и выхода к регулятору подачи электрода-инструмента 44.
Систима работает следующим образом.
Г)ереключатель вида работ 25 устанавливается в соответствуюцее положение. В Положении, соответствующем автоматической работе, программа обработки, записанная на перфоленте и считываемая реверсивным считывающим устройством 1 блоками информации передается в устройство 5, при посредничестве дешифратора 2. Работу считывающего устройства контролирует устройство 4, которое взаимодействует с устройством 10.
При записи информации с перфоленты в устройство 5, устройство 4 контролирует правильность считывания информации путем контроля четности. Переписывание информации из устройства 5 в устройство б становится возможным только после окончания реализации предЕдцущего блока при условии, что уже закончена запись с нового блока информации в устройство 5. Это осуществляется при помощи устройства 9 по сигналу с устройства 10, которое получает сигналы о состоянии интерполятора 18, компаратора 17, устройства 4, устройства 23 и устройства 13.
Переписывание блока информации из устройства 5 в устройство б равнозначно началу реализации блока в иерархической последовательности, жест ко установленной в устройстве 10 независимо от последовательности запис информации на ленте в данном блоке и формации.
Значения кода скорости координат X и У и вид движения, записанные в устройстве б, подаются в интерполято 18, а также индицируется на цифровом индикаторе 8.
Сигнал с устройства 9 вызывает начало интерполяции или установки в исходное положение.
В случае интерполяции интерполято 18 вызывает генерирование заданного отрезка кривой в виде приращений ДХ и АУ в шаговые двигатели через коммутатор 19 и выходы 42 и 43. Посл окончания интерполяции интерполятор 18 генерирует импульс конца интерполяции в устройство 10. Устройство 13 во время интерполяции контролирует стоту импульсов, высылаемых на коммутатор 19, частоты которых пропорциональны скорости подач по , осям X и У. В случае, если скорос1 ь подачи окажется чрезмерной система прерывает осуществление программы.
В случае установки в рабочее положение в интерполяторе 18 работает не блок интерполяции, а устройство пуска, торможения пуска и торможения шаговых двигателей.
Заданная велич1та координаты Z переписывается из устройства 5 в устройство 6. После этого ее корректи- J
руют, приним-;я ;О внг.:.-,ание коррекцию длины электрод...--инструмента , получаемую с задатчйка 30 коррекции через устройство 7. Значение коррекции длины электрода-инструмента Д Z при- бавляется или вычитается от заданной глубины прошивки. Скорректированное значение координаты Z сравнивается с измеряемым значением измерителя 15 в компараторе 14, который сигнализирует о совпадении скорoректированного значения координаты Z с измеряемым значением координаты Z в компаратор 17. Этот блок не позволяет электроду-инструменту превысить заданную координату Z,
5 действуя через выход к регулятору подачи электрода-инструмента 44, контролируя одновременно достижение заданной координаты Z з каждом пункте контура плоскости X, У, который опи0сан при помощи отрезков.
Подача электрода-инструмента в плоскости X, У, описывающей контур, осуществляется при помощи устройства пуска и торможения интерполятора 18 многократно, предвари5тельно неизвестным количеством переходов по контуру, представляю щих собой рабочие движения.,
Группа блоков, описывающая контур, охвачена в программе харак0терными знаками, например скобками, декодируемыми дешифратором 3, и записываемыми в регистре 11, и многократно считывается до тех пор, пока не будет реализована коор5дината Z в каждом пункте контура. Для этого реверсивное считывающее устройство 1 после записи системой управления числового характерного знака конца группы блоков в
0 случае, если не выполнено условие достижения заданной -координаты Z, перематывает перфоленту в обратном направлении до момента, когда попадает на характерный знак начала этой группы блоков, из чего следует,Q
5 что отрезок программы, заключенный между характерными знаками осуществляется многократно.
в случае удовлетворения условия достижения заданной глубины прошивки
0 электродом-инструментом компаратор 17 сигнализирует об этом в устройство 10 и в блок 12, а этот блок анулирует действие характерного знака конца группы блоков, позволяя
5 осуществлять дальнейшую часть программы.
В случае наличия ошибочной координаты Z в программе устройство обнаружения ошибок 13 сигнализиру0ет об этом и подает в устройство 10 определенный сигнал на основании сигналов, высылаемых компаратором 14. Значение координаты Z индуцируется на индикаторе 16. Возможна
5 также запись произвольного значения. координаты Z с задатчика 41, В измеритель 15 путем нажатия кнопки за писи координаты Z 40. Заданный кодовым способом номер электрюда-инструмента передается из устроПстьа 5 в устройство 6, а далее в устройство 22 и устройство . Уст ройство 22 сравнивает закодированный номер электрода-инструмента с номером электрода-инструмента находящего ся в револьверном держателе, поданным через выход с выключателей, код рующих номер электрода-инструмента 34, управляя соответствующим образом вращением револьверного держателя через выход управления заменой элек трода-инструмента 33, При автоматической замене устройство 22 высылае сигнал в устройство 6 для блокировки включения рабочего напряжения на электрод-инструмент. Для у правления возвратно-поступательным движением электрода-инструмента при чистовой обработке из устройства 5 переписывается число возвратно-поступательных движений в устройство 6. Информация об этих движениях подается со входа 32 в устройство 23. Окончание движений сигнализируется в устройство 10. Номер генератора и его наладки, записанные в устройстве 5 переписываются в устройство б и вызывают через выходы 31 включение соответствующего генератора с его наладками. Смена генератора аннулирует предьвдущий генератор и зануляет его наладки. С помощью кнопки 35, включающей автоматический поиск и чтение блока информации, можно выбрать из програм мы любой блок, номер которого установлен в задатчике номера кадра про граммы 21 при помощи устройства 4 управления и устройства 5. Рабочие движения стола, описывающие произвол ный контур в плоскости X, У, вьщеленные, например скобками, декодиру ются в дешифраторе 3, запоминаются регистре 11 и могут быть погашены и блоке 12 после нажатия переключателя 36, что приводит к осуществлению программы без рабочих движений стола Гашение единичного блока информации, обозначенное на ленте знаком декодированном в дешифраторе 2, реализуется устройством 20 после подтвержения гашения переключатеяем 38, находящимся на пульте оператора В положении переключателя 25, обозначающем работу блок за блоком, система работает также, как при автоматической работе с той разницей, что после выполнения каждого блока машина переходит в состояние стоп и следует вручную запустить выполнение следуквдего блока. Изсбгютенне лоз го.;.-, с-, суцдественнсг увеличить скорость и точность обработки деталей сложной формы методом электроэрозионной прО1ьиЕКи по произлльно запрограммированной кривой. Формула изобретения Система программного управления электроэрозионными прошивочными станками, содержащая реверсивное считывающее устройство, соединенное входом с первым выходом первого устройства управления, а выхЪдом со входом первого дешифратора, первый выход которого подключен через промежуточное запоминающее устройство к первому, входу оперативного запоминающего устройства, первый выход которого соединен с первым входом первого индикатора, второй выход с первым входом второго устройства управления, третий выход и второй вход - соот-ветственно с первым входом и выходом третьего устройства управления, а четвертый выход и третий вход - соответственно с первыми входом и выходом корректирующего устройства, второй вход которого подключен к выходу задатчик.а коррекции, а. третий вход - к четвертому входу оперативного запоминающего устройства, первому входу четвертого устройства управления и к первому выходу интерполятора, второй выход которого соединен со вторым входом первого индикатора, третий выход с первым входом устройства обнаружения ошибок и со входом коммутатора, а вход интерполятора - с пятым выходом оперативного запоминающего устройства, пятый вход которого соединен с выходом первого задатчика координат и с первым входом измерителя координат, выход которого подключен ко входу второго и;- дикатора, второй выход первого дешифратора соединен со входом устройства установки в исходное состояние, подключенного выходом к первому входу первого устройства управления, второй вход которого соединен с третьим выходом первого дешифратора, третий вход с выходом задатчика номера кадра программы, а четвертый вход - со вторым выходом промежуточного запоминающего устройства, выход второго задатчика координат подключен к .шестому входу оперативного запоминанвдего устройства, отличающаяся тем, что, с цельно увеличения быстродействия системы, в нее введены второй дешифратор, регистр, первый компаратор, блок фиксации положения объекта, пятое устройство управления и второй компаратор, выход которого подключен
к первому входу блока фиксации полог жения объекта и первому входу пято го устройства управления, первый вход - к выходу четвертого устройства управления, второй вход - к первому выходу регистра, а, третий в1ход - к первому выходу первого компаратора, первый вход которого соединен с шестым выходом оперативного запоминающего устройства, второй вход - со вторым выходом измерителя координат, а второй выход - со вторым входом устройства обнаружения ошибок, выход которого подключен ко BTbpQMy входу пятого устройства управления, третий вход которого подключен к выходу блока фиксации положения объекта и пятому входу первого устройства управления, шестой вход и второй выход Koi oporo соединены соответственно с первым выходом и. четвертым входом пятого блока управления, второй выход и пятый вход которого подключены соответственно
ко вторым входу и вьоходу второго устройства управления, а третийвыход и шестой вход - соответственно ко вторым входу и выходу треьвго устройства управления, четвертый выход пятого устройства управления соединен со вторым входом четвертого устройства управления, седьмой вход с четвертым выходом интерполятора, а восьмой вход - со вторым выходом регистраj первый вход которого через
0 вторюй дешифратор подключен к выходу реверсивного считывающего устройства, а третий выход - ко второму входу блока фиксации положения объекта и седьмому входу первого устрой5ства управления.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 409195, кл. G 05 В 19/18, 1970.
2.Патент СССР 367623,
кл.б 05 В 19/00, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное задающее устройство для токарного станка с программным управлением | 1981 |
|
SU1012688A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для отображения информации на экране цветного видеоконтрольного блока | 1988 |
|
SU1529280A1 |
| Устройство для автоматического управления (его варианты) | 1984 |
|
SU1249481A1 |
| Устройство для контроля программ на координатографе | 1983 |
|
SU1149219A1 |
| Цифровой интерполятор | 1976 |
|
SU651317A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1631518A1 |
| Устройство для отображения информации на экране телевизионного индикатора | 1986 |
|
SU1695372A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Интерполятор поверхности | 1980 |
|
SU942040A1 |