Известны устройства для автоматического управления торможением поезда на основе слежения за программной тормозной кривой.
Цель изобретения - упростить устройство. Достигается это тем, что в предложенном устройстве осевой датчик соединен со входом регистра пути и через логическую схему «И, управляемую калибровапными по длительности импульсами, - со входом регистра фактической скорости, выходы которого через блок сравнения подключены к выходам регистра программной скорости, соединенным с блоком программы торможения;
установлен регистр интервалов пути снижения программной скорости торможения, подключенный через блок сравнения к блоку программы торможения и к регистру программной скорости;
установлен блок фиксации точек перелома аиироксимировапной тормозной кривой, нодключенный через логические схемы «И к блоку программы торможения и переключателю интенсивности торможения;
вход регистра рассогласования фактической п программной скорости подключен через логическую схему «И ко входу регистра фактической скорости и к блоку сравнения фактической и программной скорости, а выход через логические схемы - к исполнительному устройству.
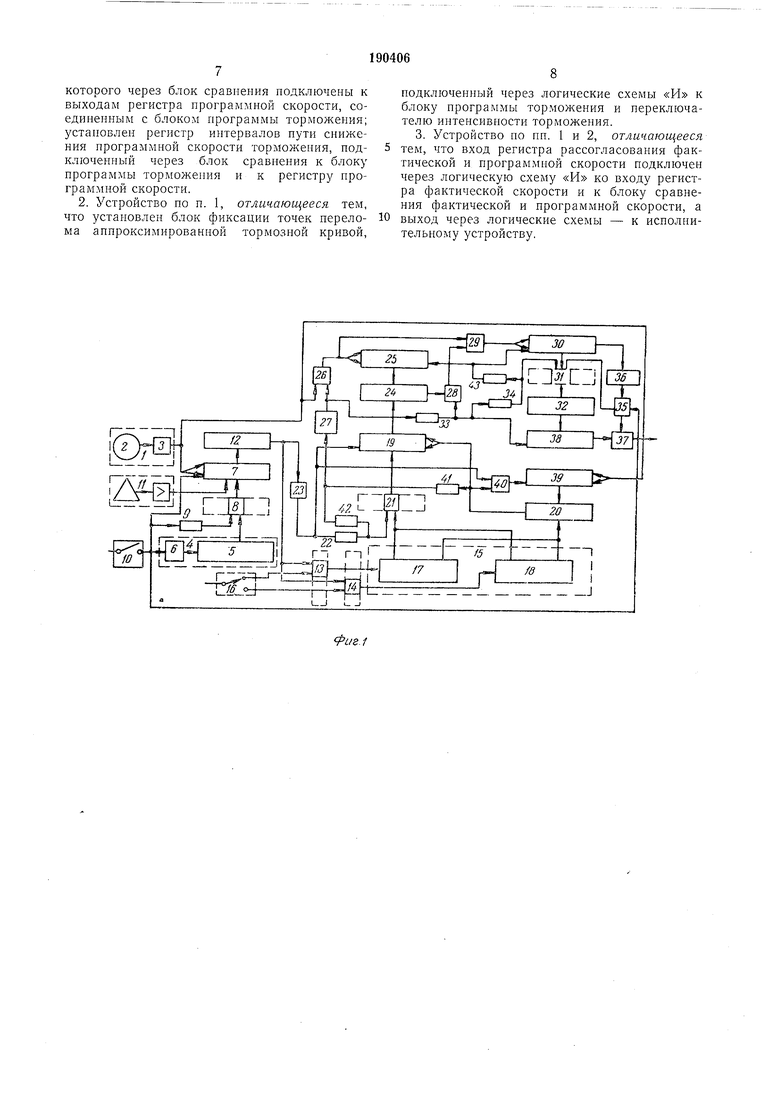
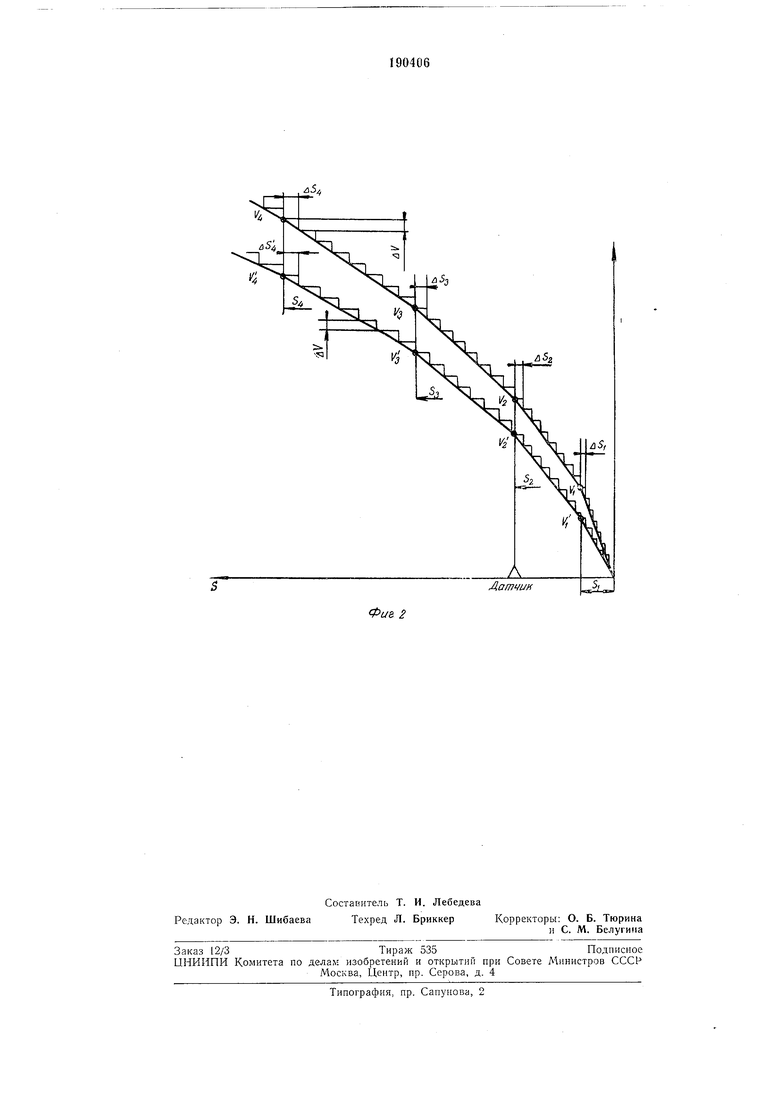
На фиг. 1 приведена принципиальная схема устройства, на фиг. 2 - программные кривые для двух интенсивностей торможения.
Осевой датчик / содержит многополюсный тахогенератор 2 переменного тока, частота которого зависит от числа оборотов колесной пары, п формнрующий каскад 3, преобразующий синусоидальное напряжение тахогенератора в импульсы прямоугольной формы с крутизной фронта, достаточной для переключения счетных элементов.
В блок 4 программы пути входят запоминаюпдае схемы 5, которые содержат данные о длинах перегонов, и переключатель 6 проipaMMbi, в качестве которого может быть использован шаговый искатель. Заномппаюш,ие схемы связаны с регистром пути 7 посредством логических схем «И 8 вторые входы которых через транзнсторную линию задержки
9 подключены к кнопке 10 «пуск, а выход связан с регистром нути 7. Регистр нути представляет собой счетчик обратного счета, выполняющий вычитание импульсов нути из программного числа. На регистр 7 воздействует также блок // напольного датчика, который включает в себя приемник сигнала напольного датчика и усилитель. На выходе регистра подключен блок 12 фиксации точек перелома анпроксимпрованной тормозной
падения, вы11олнен1 ых в виде диодных матриц. Выходные шины блока 12 соединены с логическими схема.л1и 13 и М, посредством которых осуществляется иереключение даниых блока 15 программы торможения. Вторые входы этих логических схем подключены к нерекл10чател о 16 иитенсивноети торможения.
Программа торможения разбита на две части 17 и 18, содержащие данные кривых, соответствующих нормальной и пониженной интенсивиости торможения. На фиг. 2 изображены иримериые нрограммные кривые для двух иитеиспвностей торможения. За основу при исиолиеиии этих нрограмм берутся кусочио-линейиые аппроксимации расчетных кривых торможения при средних условиях движения.
Схемы совпадения блока 12 настроены иа числа, соответствующие расстояниям (5i, So,...) точек нерелома кривых до места остановки. В блок 15 заложены скорости, соответствующие этим точкам (Kl, Va,-- и V, V,--), и для каждого ирямолииейиого участка интервалы (A5i, ASa,...), необходимые для снижения скорости па некоторую, иостояиную величину Д1/ при торможении, согласно программной кривой.
Регистр 19 программной скорости - счетчик обратиого счета, производит вычитание импульсов, поступающих от блока сравнения 20 из ирограммной величины скорости. Блок 15 связан с регистром 19 посредством логических схем «И 21, один из входов которых связан через траизисториую линию задержки 22 и через формирующий каскад 23 с входами логических схем 13 и 14. Регистр 19 связан посредством блока сравиения 24 с регистром 25 фактической скорости, представляющим собой счетчик прямого счета. Счетный вход регистра 25.подключен к выходу логической схемы «И 26, одии из входов которой связан с осевым датчиком 1, а другой - с генератором 27 калиброваииых импульсов.
На выходе блока сравнения 24 подключен триггер 28, воздействующий на один из входов логической схемы «И 29, стоящей иа входе регистра 30 рассогласования фактической и программной скорости. Второй вход огической схемы 29 соединен с выходом логической схемы 26.
Регистр 30 посредством логических схем 31 вязан с дешнфратором 32 рассогласования. Одии из входов логических схем 31 связан с енератором 27 через две транзисторные лиии задержки 33 и 34. На схемы 31 воздейтвует также триггер 35, который связан чеез блок сравиения 36 с регистром 30. Втоой выход триггера соединен с исполнительным устройством 37, воздействующим на поздную схему унравлеиия. Триггер 35 связаи акже с кнопкой «пуск.
помииающему блоку 38. Блок 38 воздействует также на исиолиительное устройство 37. Регистр 39 интервалов иути сиилсения программной скорости служит для отсчета проходимого пути и связаи с блоком 15 посредством блока сравнения 20. Выход блока сравнения 20 подключеи к счетиому входу регистра 19, а также через логическую схему «ИЛИ 40 к регистру 39 и через линию задержки 41 - к генератору 27. На этот же вход генератора 27 поступают сигналы синхронизации от формирователя 23 через линии задержки 22 и 42. Приведение регистров 25 и 30 в исходное положение осуществляется посредством липии задерл ки 43.
Порядок работы устройства.
При отправлении поезда сигнал от кнопки
«иуск воздействует на следуюнше элементы устройства: иа триггер 35, устанавливая его в ноложение, разрешающее включение тяги и запрещающее сбор тормозной схемы, на переключатель 6 блока 4 программы иути 4, с
помощью которого переключается программа пути, содержащая информацию о длине данного перегона, на регистр пути, производя сброс его в нулевое положение. Кроме того, от сигнала «иуск с выдерл кой времени, необходимой для переключения программы блока 15 и для сброса регистра 7, открываются логические схемы 8 на выходе блока программы пути и производится запись программного расстояния в регистр 7. По мере
разгона на счетиый вход регистра 7 поступают импульсы от осевого датчика 1, которые вычитаются из числа, записанного в регистре 7. Перед отправлением поезда или заблаговременно до начала торможеиия переключатель 16 устаиавливается машииистом в нужное положение, определяемое условиями сцеплеиия или другими соображениями. От переключателя 16 сигнал иодается на один из входов групп логических схем 13 и 14, соответствующих выбраиной иитеисивиости торможения.
Па определенных расстояниях от места остановки, соответствующих точкам перелома программпых кривых торможения, т. е. при
определепиых числах в регистре 7 блок 12, подключенный к выходам регистра 7, дает разрешение иа нереключение программы тормол ения путем подачи сигнала на второй вход логической схемы, отвечающей данной
точке перелома аппроксимированной тормозной кривой. Одновременио сигнал от блока 12 нроходит через формирующий каскад 23 к регистру 19 программной скорости и через схему «ИЛИ 40 к регистру 39, сбрасывая регистры 19 и 39 в нулевое ноложение. По истечении времеии, необходимого для сброса регистра 19, задаваемого линией задержки 22, открываются логические схемы 21, установленные на выходе блока 15 программы торной скорости в регистр 19. Затем по истечении времени, необходимого для записи программной скорости, задаваемого линией задержки 42, запускается генератор 27 калиброванных импульсов, который выдает импульс, открывающий логическую схему 26 для пропуска импульсов от осевого датчика 1 в регистр 25. В момент наступления равенства числа в регистре 25 с числом в регистре 19 блок сравнения 24 выдает сигнал, и триггер 28 переходит в.положение, в котором он снимает запрет с логической схемы 29, нропускающей излишние импульсы параллельно регистру 25 в регистр 30 рассогласования. Таким образом, за время калиброванного импульса в регистре 25 будет записано число, соответствующее действительной скорости поезда, а в регистре 30 - величина превышения этой скорости над программной. В процессе записи, если рассогласование фактической скорости достигнет величины, на которую настроен блок сравнения 36, то триггер 35 установится в такое положение, в котором снимается запрет с одного из входов логических схем 31 и подается команда в исполнительное устройство 57 на отключение тяги, если последняя не была снята раньше, и на сбор тормозной схемы.
После окончания записи сигнал от генератора 27 через линию задержки 33 перебросит триггер 28 в исходное положение и подготовит блок 38 к приему новой информации. После этого, через время, задаваемое линией задержки 34, откроются логические схемы 31 на выходе регистра 30, и посредством дешифратора 32 новая ииформация запишется в блок 38, на выходе которого подключено исполнительное устройство, задающее соответствующую интенсивность торможения поезда. С целью обнаружения знака рассогласования фактической скорости с расчетной, в блок 15 программы торможения заложены скорости, меньшие на некоторую постоянную величину, чем требуется по расчетной кривой торможения. При этом, если в регистр 30 пройдет число импульсов, равное этой постоянной величине, то посредством дешифратора 32 и блока S8 подается команда, устанавливающая тормозтпю силу, необходимую для средних условий движения. При наличии в регистре 30 меньшего числа импульсов подается команда, устанавливающая меньщую иитенсивность торможеиия и т. д. Устройство предусматривает несколько ступеней торможения.
После окончания считывания рассогласования скорости, через линию задержки 43 проходит сигнал, сбрасывающий регистры 25 и 30.
Следующее сравнение скоростей произойдет при проходе поездом интервала пути, необходимого для снижения скорости на величину АУ по программе. Счет этого пути начинается сразу же после сброса регистра 39. Для .этого на счетный вход регистра 39 постунают импульсы с осевого датчика 1. В момент равенства чисел в регистре 39 и в блоке 15, блок сравнения 20 выдает сигнал, который через схему «ИЛИ 40 сбрасывает регистр 39, подготавливая его к следующему отсчету пути, и, кроме того, проходит на счетный вход регистра 19. В результате в регистре 19 программная скорость уменьшается иа величииу АУ. После этого через линию задержки 41 производится запуск геиератора 27 калиброванных импульсов 27, R результате чего произойдет замер и сравнение скоростей таким образом, как это было описано выше. Далее е1)аБнение и корректировка тормозного усилия будет повторяться при каждом новом совпадении числа в регистре 39 и в програ 1ме. При совпадещш расстояния, оставшегося до остановки, с расстоянием следуюпхей точки перелома программной TODмозной кривой, будет подан сигнал с блока 12 на перевод программы блока 15 в соответствие с этой точкой, и весь процесс повторится так, как описано выше.
В момент проследовапия иапольного датчика сигнал от блока // ппоходит через усилитель к регистру 7 и устанавливает в нем число, соответствующее оставшейся длтттте пути от датчика до еста остановки. Это расстояние выбирается равным расстоянию до места остановки от одной из точек перелома программной кривой торможения.
В соответствии с чиcлo т. записанным в регистре 7, из блока 15 переписывается в регистр 19 число, соответствуюптее программ
НОИ скорости в даппон точке ПУТИ. т. е. происходит точная привязка програлтмной тормозной кривой к пути.
После указаппоп корректировки устройство работает прежним порядком.
Предлагаемое устройство предусматривает остановку поездов в назначенном месте по заранее намеченной программе, заложенной в устройство н.э движупдемся поезде, а ие задаваемой с помоитыо напольных устройств.
Устройство выполняется на типовых полупроводниковых модулях (эле: 1ентах).
П р е д т. е т изобретен и я
. Устройство для автоматического управления торможениед поезда на основе слежения за программной тормозпой кривой, содержаихее осевой датчик, напольный датчик пути, блок программы пути, блок программы торможения, регистры фактической и программной скорости, регистр рассогласования фактической и программной скорости, блоки сравнения, переключатель ннтенснвпосттт торможения, логические схемы и исполиптельпое
устройство, отли1аю цееся тем, что, с целью упроп1,егия устройства, осевой датчик соедттнен со ВХОДОЛ1 регистра пути и через логическую схему «И, управляемую калпброваиными по длительности импульсами, - со вхокоторого через блок сравнения нодключены к выходам регистра нрограммной скорости, соединенным с блоком программы торможения; установлен регистр интервалов нути снижения программной скорости торможения, подключенный через блок сравнения к блоку программы торможения и к регистру нрограммной скорости.
2. Устройство по п. 1, отличающееся тем, что установлен блок фиксации точек перелома аппроксимированной тормозной кривой,
подключенный через логические схемы «И к блоку программы торможения и переключателю интенсивности торможения.
3. Устройство по ни. 1 и 2, отличающееся
тем, что вход регистра рассогласования фактической и программной скорости подключен через логическую схему «И ко входу регистра фактической скорости и к блоку сравнения фактической и программной скорости, а
выход через логические схемы - к исполнительному устройству.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для СТУПЕНЧАТОГО РЕГУЛИРОВАНИЯ ТОРМОЖЕНИЯ ПОЕЗДА | 1968 |
|
SU219617A1 |
| Устройство для управления торможением поезда | 1988 |
|
SU1661019A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ;:ПОЕЗДОМI .(,.,U.. | 1967 |
|
SU190405A1 |
| Устройство для определения скорости поезда на участке торможения | 1989 |
|
SU1791246A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ МЕТРОПОЛИТЕНА | 1969 |
|
SU241497A1 |
| Устройство для программного управления электроприводом | 1985 |
|
SU1260919A1 |
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Устройство и способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения | 2022 |
|
RU2822934C2 |
| Устройство для программного счета витков из гибкого материала | 1985 |
|
SU1298783A1 |
| Устройство для управления движением поезда | 1980 |
|
SU882803A1 |