Известны устройства для удержания в горизонтальном положении платформы крана, содержащие датчик угла наклона, связанный с электромагнитами управления дроссельных следящих золотников выносных опор.
Особенностью предлагаемого устройства является то, что датчик вынолнен в виде отвеса, который закреплен на кольце. Кольцо опирается на иглу, установленную на опорной площадке платформы. В верхней части кольца закреплен сердечник, расположенный между катушками, которые образуют дифференциальные магнитные системы, подающие при изменении зазора между сердечником и катушками в результате наклона илатформ;л сигнал рассогласования на соответствующие выносные опоры.
При таком выполнении устройства иовышается надежность его работы.
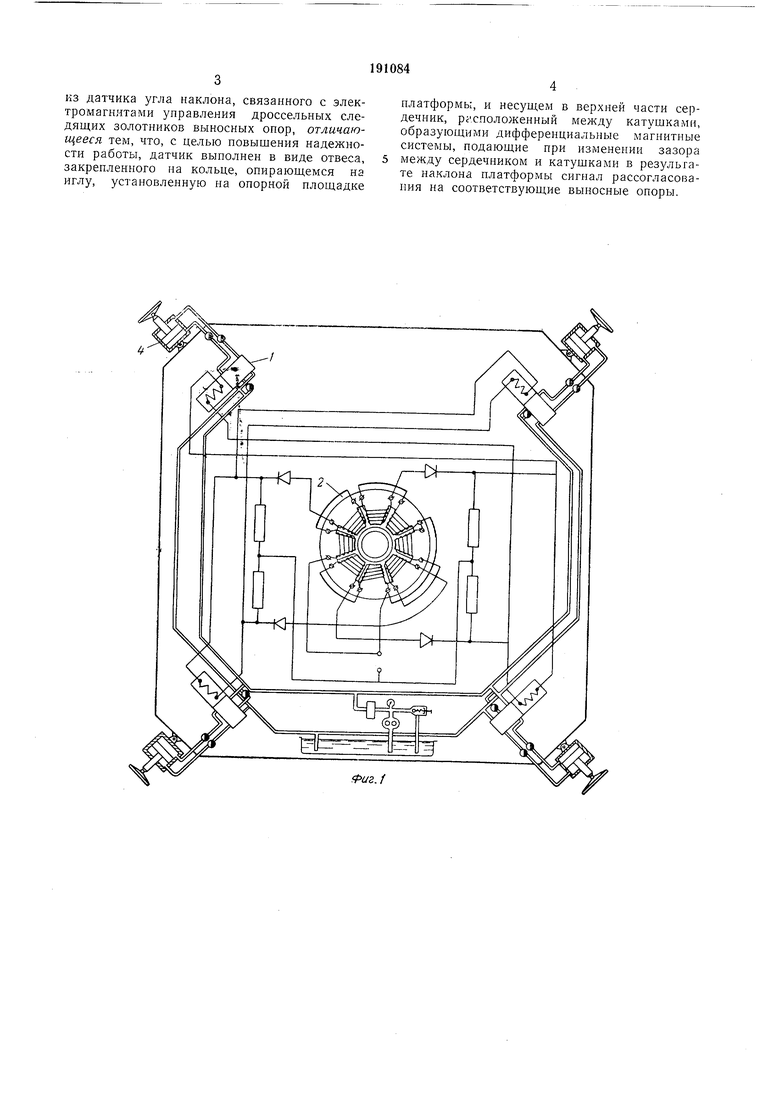
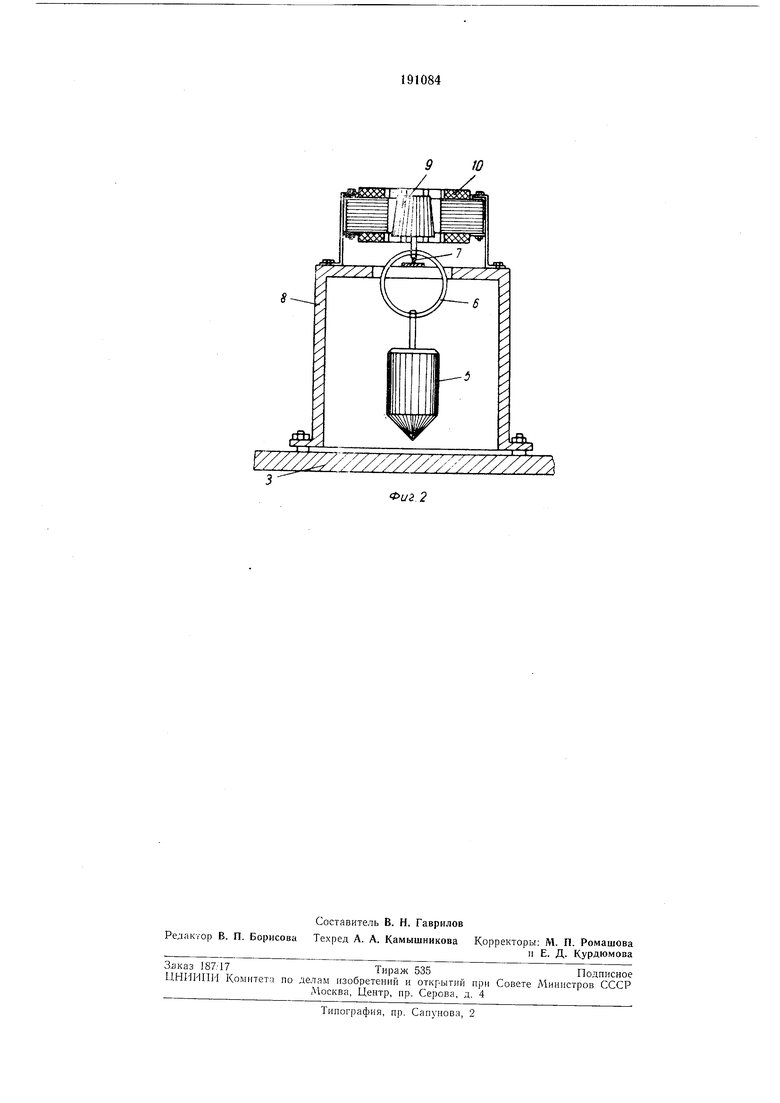
На фиг. 1 изображено описываемое устройство, общий вид; на фиг. 2 - датчик угла наклона платформы.
Устройство содержит четыре дроссельных следящих гидравлических золотника / с электромагнитным унравлением. Катушки электроамагнитов золотников связаны с датчиком 2 угла наклона платформы 3. Золотники соединены с выносными гидравлически.ми опорами 4 платформы.
Датчик угла наклона представляет собой отвес 5, который с помощью кольца 6 и иглы 7 подвешен к опорной площадке 8, жестко связанной с платформой 3.
На верхней части кольца закреплен сердечник 9, выполненный в виде усеченного конуса из трансформаторного железа. Вокруг сердечника расположены восемь катушек 10, представляющие собой две взаимно перпендикулярные дифференциальные магнитные системы. Каждая из этих систем выдает сигнал рассогласования на два следящих золотника, концы катушек которых нодсоединены таким образом, что действие сигнала на каждый из
золотников противоположно.
При изменении угла наклона платформы отвес датчика, сохраняя вертикальное положение, приближает сердечник к какой-либо паре катушек, изменяя зазор между ними. При
этом на выходе датчика появляется напряжение рассогласования, воздействующее на электромагниты золотников, которые включают в работу соответствующие откидные опоры, обеспечивающие выравнивание платформы.
КЗ датчика угла наклона, связанного с электромагнитами управления дроссельных следящих золотников выносных опор, отличающееся тем, что, с целью повышения надежности работы, датчик выполнен в виде отвеса, закрепленного па кольце, опирающемся на иглу, устаповленную па опорной площадке
платформы, и несущем в верхней части сердечник, расположенный между катушками, образующими дифференциальные магнитные системы, подающие при изменении зазора между сердечником и катушками в резульгате наклона платформы сигнал рассогласования на соответствующие выносные опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМИ ОПОРАМИФу^'.Д 'i.-i.''--'—-• | 1971 |
|
SU422681A1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| Устройство для определения угла наклона объекта | 1982 |
|
SU1122888A1 |
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| Система управления выносными опорами платформы | 1982 |
|
SU1039863A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1977 |
|
SU1840394A1 |
| Устройство для управления выносными опорами грузовой платформы | 1986 |
|
SU1423493A1 |
| Устройство для определения угла наклона объекта | 1980 |
|
SU896414A1 |
| Устройство для определения углаНАКлОНА Об'ЕКТА | 1979 |
|
SU853390A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |