Изобретения относятся к приборостроению и могут использоваться при создании бескарданных гироскопов на сферической шарикоподшипниковой опоре, которые могут применяться, например, в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости.
Известен гироскоп [1], содержащий корпус, гиромотор, карданов подвес, датчики угла и датчики момента, повернутые относительно друг друга на 90° вокруг продольной оси гироскопа.
Основным недостатком данного гироскопа является наличие карданова подвеса, что обуславливает значительный дрейф гироскопа из-за необходимости применения токоподводов для подачи электропитания на обмотки гиромотора, датчиков угла и датчиков момента и шарикоподшипников - для обеспечения вращения рамок карданова подвеса. Наиболее близким по технической сущности к заявленному устройству является гироскоп [2], содержащий корпус с герметично закрывающейся крышкой, гиромотор, ротор на сферической шарикоподшипниковой опоре, датчики угла взаимоиндуктивного типа и электромагнитные датчики момента. Статор гиродвигателя состоит из двух шихтованных пакетов, разделенных между собой немагнитным элементом, и обмотки, витки которой охватывают оба пакета. Обмотка гиродвигателя кроме основной своей функции выполняет функцию первичной обмотки взаимоиндуктивного датчика угла. Вторичные обмотки датчиков угла намотаны раздельно на каждом пакете, причем каждая пара обмоток геометрически сдвинута относительно друг друга на 90 градусов, что позволяет производить измерения по двум осям. Датчики момента конструктивно выполнены аналогично с датчиками угла и геометрически сдвинуты относительно них на 180 градусов. Недостатком данного гироскопа является нелинейная (квадратичная) характеристика датчика момента, не позволяющая его применение в качестве чувствительного элемента гиростабилизатора или двухканального измерителя угловой скорости без использования дополнительных вычислительных устройств, линеаризующих статическую характеристику датчика момента.
Задачей, на решение которой направлены изобретения, является снижение аппаратных затрат при использовании предложенного гироскопа, например в качестве чувствительного элемента гиростабилизатора, за счет исключения дополнительных вычислительных устройств, необходимых для линеаризации статической характеристики датчика момента гироскопа.
Поставленная задача для первого варианта гироскопа, содержащего корпус с расположенным внутри него гиромотором, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, взаимоиндуктивные датчики угла и датчики момента, решается за счет того, что в роторе выполнена кольцевая полость, в которой расположены дугообразные катушки датчиков момента, жестко связанные с корпусом гироскопа, а на роторе расположены кольцевой магнитопровод П-образного сечения и постоянные магниты датчиков момента, расположенные напротив верхней части катушек. Второй вариант гироскопа отличается от первого тем, что на роторе расположены два кольцевых магнитопровода и два ряда постоянных магнитов датчиков момента, причем один ряд расположен напротив верхней части катушек, а другой ряд - напротив нижней части катушек, при этом линии намагниченности одного ряда направлены к центру гироскопа, а другого - в противоположную сторону.
К существенным отличиям предложенного гироскопа по сравнению с известным является особая конструкция датчика момента, которая позволяет реализовать линейную зависимость создаваемого момента от тока управления, а не квадратичную, как в устройстве-прототипе.
Изобретение поясняется чертежами.
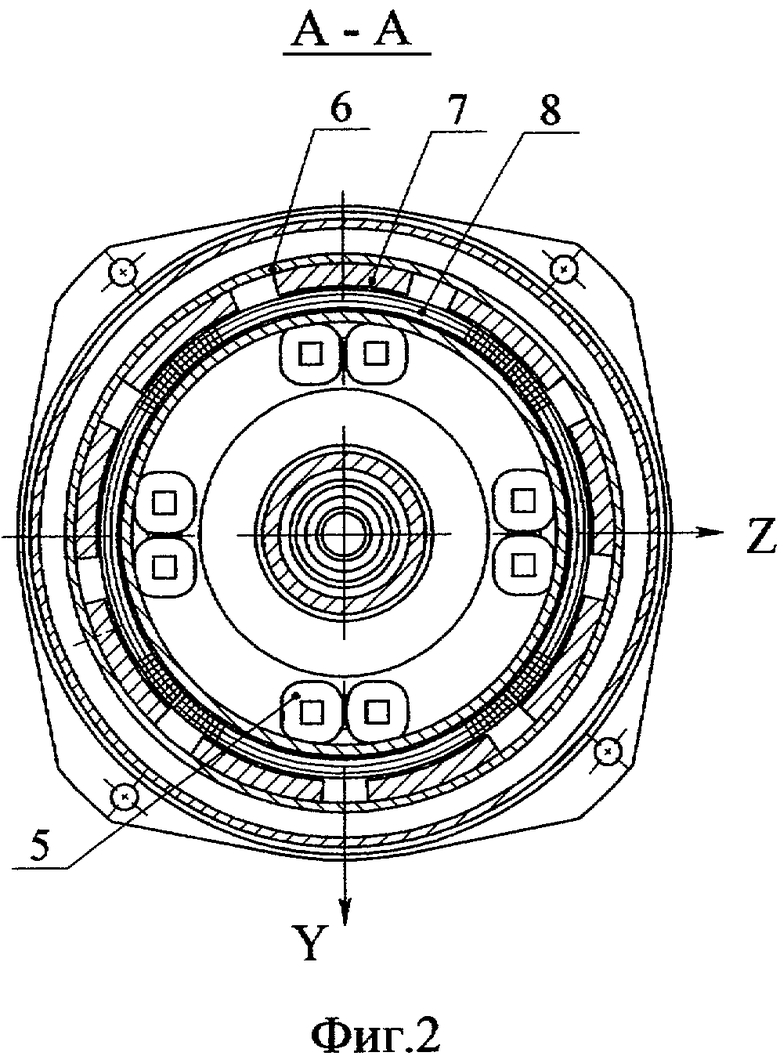
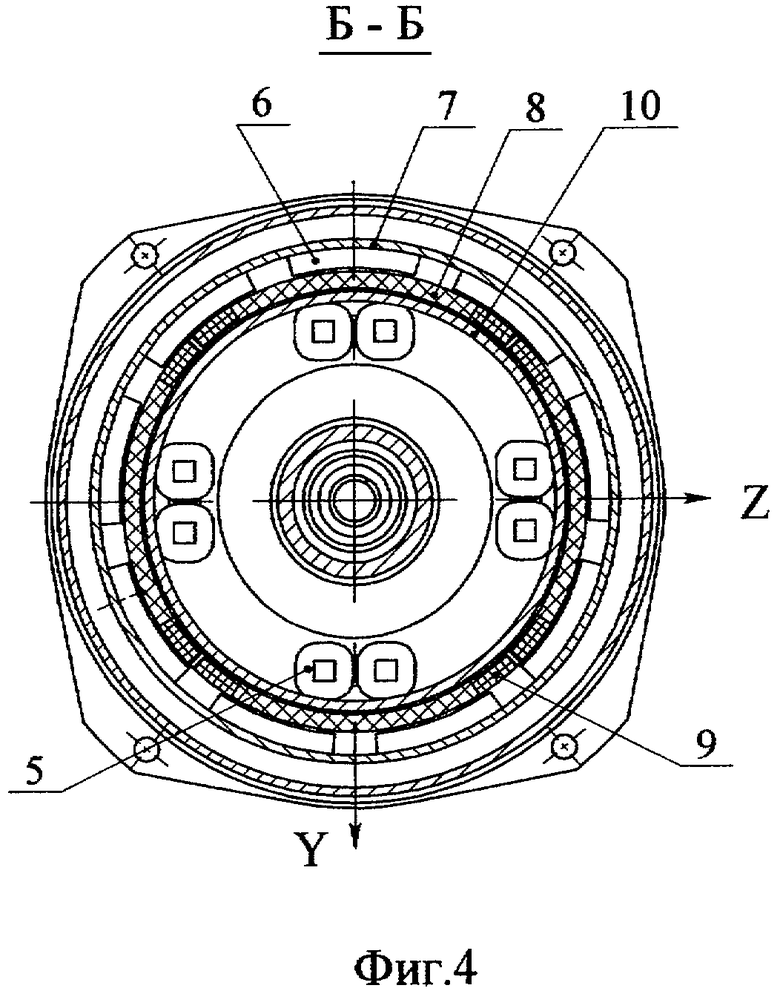
На фиг.1 представлен вид первого варианта предложенного гироскопа сбоку в разрезе; на фиг.2 - вид первого варианта в сечении по линии А-А фиг.1; на фиг.3 представлен вид второго варианта предложенного гироскопа сбоку в разрезе, а на фиг.4 - второго варианта в сечении по линии Б-Б фиг.3.
На фиг.2 и 4 статор 2, ротор 3 и сферическая опора 4 условно не показаны.
В предложенной предпочтительной реализации гироскопа по первому варианту он содержит корпус 1, гиромотор, включающий статор 2 с катушками и ротор 3 на сферической шарикоподшипниковой опоре 4, датчики 5 угла и датчики момента в виде кольцевого магнитопровода 6 П-образного сечения и подвижных постоянных магнитов 7, закрепленных на роторе 3, и четырех неподвижных дугообразных катушек 8, жестко связанных с корпусом гироскопа.
В роторе гироскопа выполнена кольцевая полость П-образного сечения, в которой закреплен магнитопровод 6. На магнитоповоде 6 расположен один ряд, например, из девяти постоянных магнитов 7, линии намагниченности которых направлены в одном направлении (к центру или от центра). Неподвижные дугообразные катушки 8 закреплены на корпусе гироскопа и расположены в П-образной полости ротора таким образом, что верхняя часть намотки катушки размещена напротив ряда постоянных магнитов 7. Датчики 5 угла выполнены, например, в виде четырех П-образных сердечников, размещенных на корпусе 1 гироскопа попарно вдоль измерительных осей гироскопа. На каждом сердечнике датчиков 5 угла расположены две катушки: возбуждения и съема сигнала. Подвижным элементом датчиков 5 угла является кольцо 9 из магнитного материала, располагаемое на роторе 3 гироскопа. Такая конструкция датчиков 5 угла позволяет производить измерения по двум осям. Сигнальные катушки датчиков 5 угла каждого из двух измерительных каналов включены последовательно встречно так, что наводимые в них ЭДС вычитаются.
Гироскоп работает следующим образом. В нулевом положении в силу симметрии выходной сигнал с датчиков 5 угла отсутствует. В режиме измерения при наличии угловой скорости, например, относительно оси Y корпус 1 гироскопа начнет разворачиваться относительно этой оси, а ротор 3 будет стремиться сохранить неизменным в инерциальном пространстве направление вектора кинетического момента. Зазоры между магнитным кольцом 9 и торцевыми поверхностями сердечников датчика 5 угла изменятся, и на выходе датчика 5 угла появится сигнал, амплитуда которого пропорциональна измеряемому углу, а фаза определяет знак углового перемещения. Данный сигнал выпрямляется и подается в катушки 8 датчика момента по оси Z. За счет эффекта силового взаимодействия тока, протекающего в катушках 8, и поля постоянных магнитов 7 создается момент, стремящийся развернуть ротор 3 относительно оси Z, при этом ротор 3 по правилу прецессии будет поворачиваться относительно оси Y, стремясь уменьшить до нуля рассогласование на датчике 5 угла. Катушки 8 датчиков момента по каждой из осей, расположенные напротив друг друга, включены таким образом, что при протекании в них тока создаваемые моменты складываются. Мерой угловой скорости является ток в катушках 8 датчика момента. При вращении ротора 3 индукция магнитного поля в воздушном зазоре остается в среднем постоянной, статическая характеристика гироскопа при этом является линейной:
где ω - измеряемая угловая скорость,
Мдм - момент, создаваемый датчиком момента,
Н - кинетический момент ротора 3 гироскопа,
Вср - среднее значение индукции магнитного поля в воздушном зазоре,
w - число витков одной катушки 8 датчика момента,
lа - длина одной активной части катушки 8,
i - ток в катушках 8 датчика момента.
При использовании гироскопа в качестве чувствительного элемента гиростабилизатора в режиме управления при необходимости разворота гироплатформы, например, относительно оси Y управляющий сигнал подается в катушки 8 датчика момента по оси Z. Создается момент, стремящийся развернуть ротор 3 относительно оси Z, при этом ротор 3 по правилу прецессии будет поворачиваться относительно оси Y. На выходе датчика 5 угла Y появится сигнал, который выпрямляется и подается, например, на двигатель разгрузки, разворачивающий платформу, таким образом, чтобы уменьшить до нуля рассогласование на датчике 5 угла. При этом обеспечивается линейность закона управления:
где ωупр - скорость управления,
iупр - управляющий сигнал (ток в катушках датчика момента).
Во втором варианте гироскопа (фиг.3, 4) на роторе 3 в полости П-образного сечения закреплены два магнитопровода 6 и 10. На магнитоповоде 6 расположены два ряда постоянных магнитов 7 датчиков момента, например, из девяти магнитов 7 каждый, при этом линии намагниченности одного ряда направлены к центру гироскопа, а другого - от центра. Четыре неподвижные дугообразные катушки 8 закреплены на корпусе 1 гироскопа и расположены в П-образной полости ротора 3 таким образом, что верхняя часть намотки катушки 8 размещена напротив одного ряда постоянных магнитов 7, а нижняя часть - напротив другого.
За счет такого расположения увеличивается рабочая длина каждой катушки 8, и, следовательно, увеличивается крутизна характеристики датчика момента. При этом зависимость скорости управления от тока в катушках 8 датчика момента остается линейной, а скорость управления по сравнению с рассмотренной выше конструкцией при прочих равных параметрах увеличивается в два раза:
Таким образом, в сравнении с прототипом использование предлагаемого устройства в качестве чувствительных элементов гиростабилизаторов обеспечивает линейный закон управления без применения дополнительных вычислительных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ГИРОСКОП | 2021 |
|
RU2771918C2 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ГИРОСКОП | 2001 |
|
RU2210733C2 |
| ГИРОСКОП | 2001 |
|
RU2197715C1 |
| ГИРОСКОП | 2001 |
|
RU2210734C2 |
| МАГНИТНАЯ СИСТЕМА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2012 |
|
RU2505784C2 |
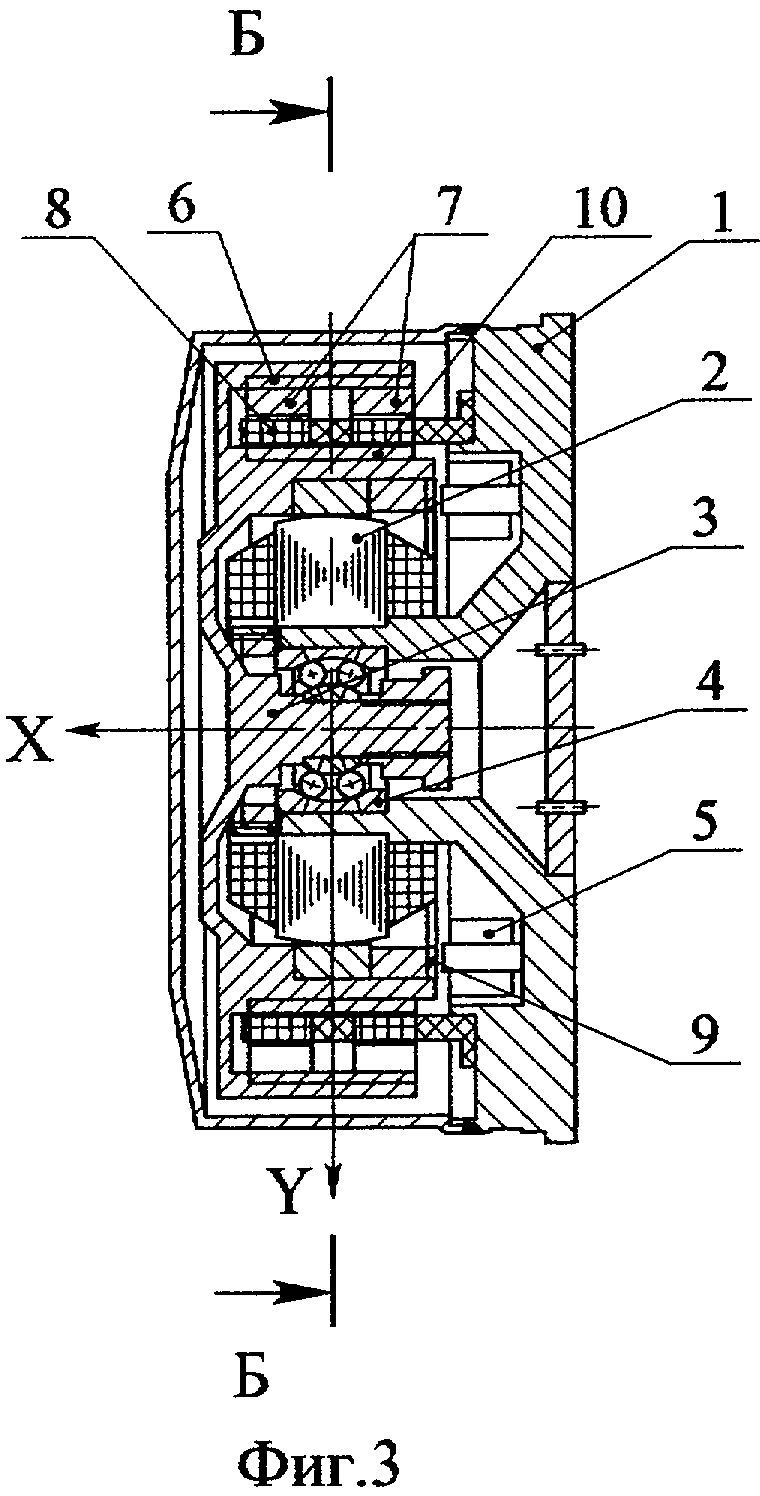
Изобретения относятся к приборостроению, в частности к бескарданным гироскопам на сферической шарикоподшипниковой опоре, которые могут использоваться, например, в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости. Гироскоп по первому варианту содержит корпус 1, внутри которого расположен гиромотор, включающий статор 2 с катушками и ротор 3 на сферической шарикоподшипниковой опоре 4, в котором выполнена кольцевая полость с дугообразными катушками 8 датчиков момента, жестко связанными с корпусом 1. На роторе 3 находятся кольцевой магнитопровод 6 П-образного сечения и постоянные магниты 7 датчиков момента, расположенные напротив верхней части катушек 8. Во втором варианте гироскопа на роторе 3 находятся два кольцевых магнитопровода и два ряда постоянных магнитов датчиков момента, причем один ряд расположен напротив верхней части катушек 8, а другой ряд - напротив нижней части катушек 8, при этом линии намагниченности одного ряда направлены к центру гироскопа, а другого - в противоположную сторону. Техническим результатом является обеспечение линейной зависимости создаваемого момента от тока управления. 2 с.п. ф-лы, 4 ил.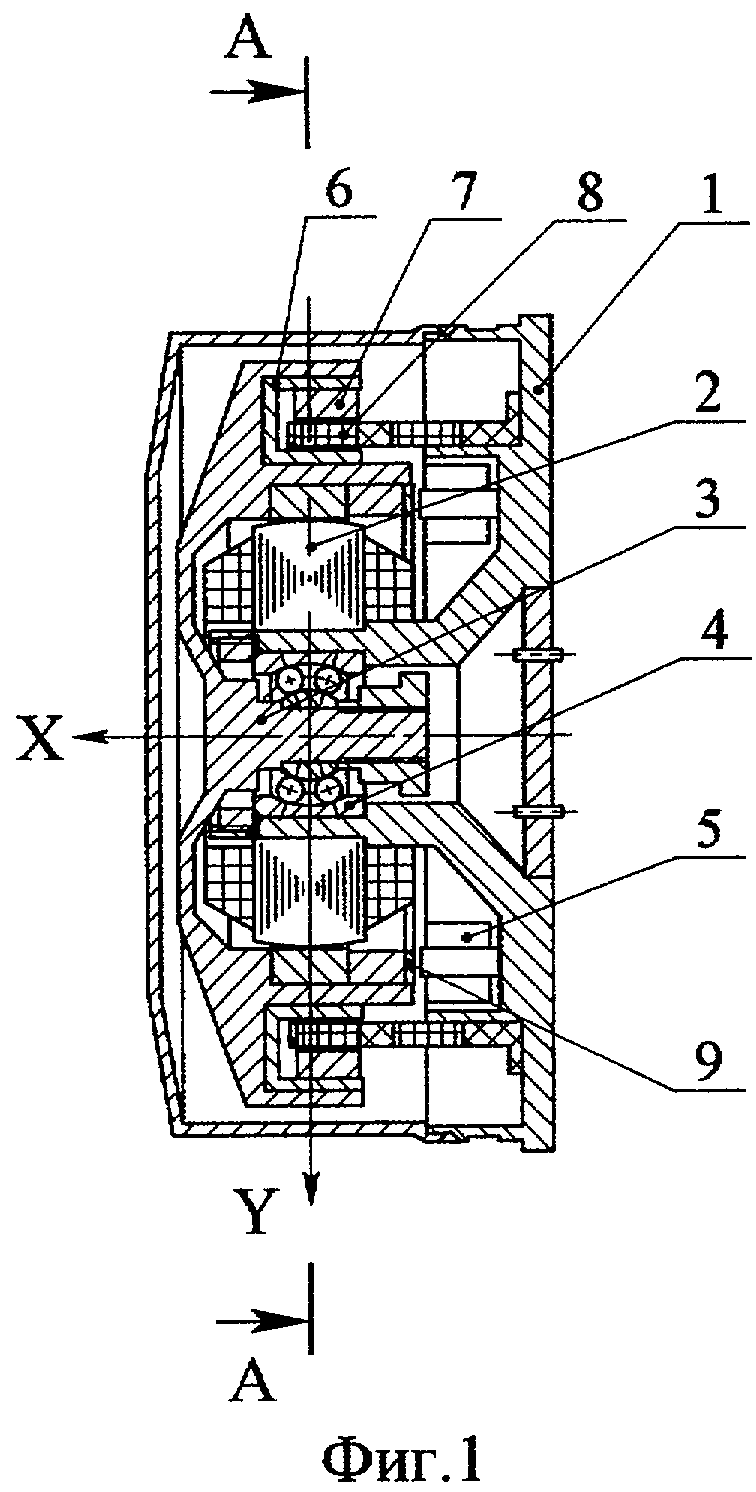
| US 3517562 А, 30.06.1970 | |||
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1971 |
|
SU431808A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| Устройство для разгрузки платформ | 1931 |
|
SU27697A1 |
| АТТРАКТАНТНЫЙ СОСТАВ ДЛЯ AGRIOTES TAURICUS HEYD (COLEOPTERA, ELATERIDAL) | 1992 |
|
RU2025066C1 |

