В основном авт. св. ЛЬ 1524-1 1 онисано устpoiicTBO для начек бумагн на конвейере акклиматизаннН rs иолнграсЬпческом производстве, которое еодержнт платформу д.ля укладывания стоны бумагн, механизм отделения п.;1чки бу.магп от стопы, механггзм завеса пачки в зажимы KoiiBeiiepa и систему конечных выключателей. Платформа выпо.тпена вертикально перемещаемой от гидроцилипдра. vVle.ханнзм отделе11ия пачки бумагн от стоны выполнен в виде клипа, горизонтально перемещаемого посредст1юм гидропривода.
Механизм завеса начки в зажимы конвейера выполнен в виде 150звратно-ноетупательпо переме1Г,аемон в вертикальной нлоскоетн поередС1ВОМ гидроиривода Л1ехапнческой руки, епабжеппой захватом цапгогюго тина.
Система конечных вык.лючателей определяет положения платформы, клипа п мехапичеекой рукп п управляет работой цилиндров гидропрнгюдов.
Предлагаемое лт.тройство отличается от изьестиых тем, что механнчеекая рука выполнена качательпо перелкчнаемой, а ее зажимы пр1 1юдятся в денствне гпдронриводом.
Кроме Toio, привод перемещения платфорMiii выполнен комбипиро1 а11пым: электричеeKiiM п гндра1 ли еским. Это отличие споеобетiiyeT предотврглнещгю В1з1падаиия 1Г1ачки бумаrii 113 зажимов на стои.
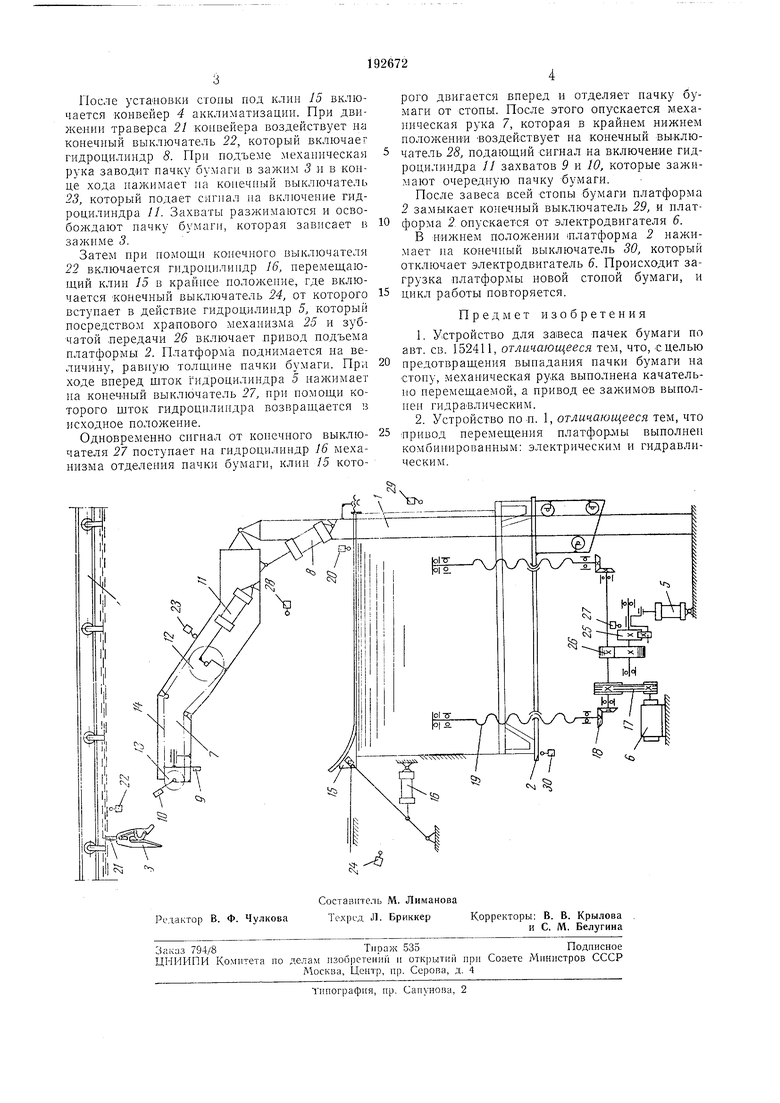
Ма чертеже изображена кинематическая схема устройства.
Па раме 1 устройства cMOHTnpouaiia платформа 2 для укладываппя стопы бумаги п механизм завеса пачкп в зажимы 3 конвейера-. Платформа 2 перемещается в вертикальной плоскости посредствол комби1И1роваппого привода от гндроцилиндра 5 и от электродвигателя 6. .1ехапизм завеса пачки в зажимы 3
выполпен в виде мехаппчеекой руки 7, качательио перемещаемой иосредством гидроцилнндра 8 гидропривода и сиабжеюгой захватами 9 п 10. Захваты 9 и 10 выполнены также подвижными от гидроцилипдра // иосредством звездочек 12, 13 и ценной передачи 14.
Механизм отделения пачки бумаги от стопы выполнеп В виде клина /5, перемещаемого в горизонтальной плоекости посредством гидроцилнпдра 16.
Работает устройетво еледующим образом.
Стона бумаги укладывается па платформу 2,
паходящуюея при этом в нижнем положепни.
Пр1 включении электродвигателя 6 через
клпно-ремеппую передачу 17 н конические шестерпи 18 сообщается движе1Н1е виптам 19, которые поднимают платформу 2 со CTonoii до мехаппзма отделения цачкн бумаги от стопы, где платформа останавлпваетея нрн воздейетвни верхнего края стопы на конечный выклю
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для завески и съема пачек бумаги, например, на конвейере акклиматизации в полиграфическом производстве | 1962 |
|
SU152411A1 |
| Устройство для упаковки в бумагу цилиндрических рулончиков медицинской ваты | 1955 |
|
SU103537A1 |
| Конвейер для акклиматизации бумаги | 1960 |
|
SU140731A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ИЗ ПАЧЕК ЛИСТОВЫХ | 1966 |
|
SU178829A1 |
| Машина для получения бахромы, например, на платках | 1957 |
|
SU110797A1 |
| Автоматический питатель листовых заготовок | 1972 |
|
SU537915A1 |
| УСТАНОВКА ДЛЯ УПАКОВКИ ЛИСТОВОГО СТЕКЛА | 1968 |
|
SU217265A1 |
| Механический раскладчик листов из пакета | 1960 |
|
SU133034A1 |
| УКЛАДЫВАЮЩЕЕ СТОПОЙ И ОБЕРТЫВАЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2526748C1 |
