Известны сиособы прослеживания контуров с уиравлением движением луча путем измерения удаления центра луча от контура и скорости изменения этого удаления.
Однако в известных сиособах прослеживания контура луч, совершая пробные движения, двигается с большей скоростью, чем получаемая в результате скорость прослеживания. Кроме того, пробные движения «размазывают луч но области, иревышаюн ей его размеры. Это снижает разрешающую способность прослеживаюших систем.
Предлагаемый способ отличается тем, что сигнал рассогласования и его производную формируют пропорциональными отклонению затенения луча от среднего и скорости изменения этого отклонения по времени. Это иозволяет исключить пробные движения луча.
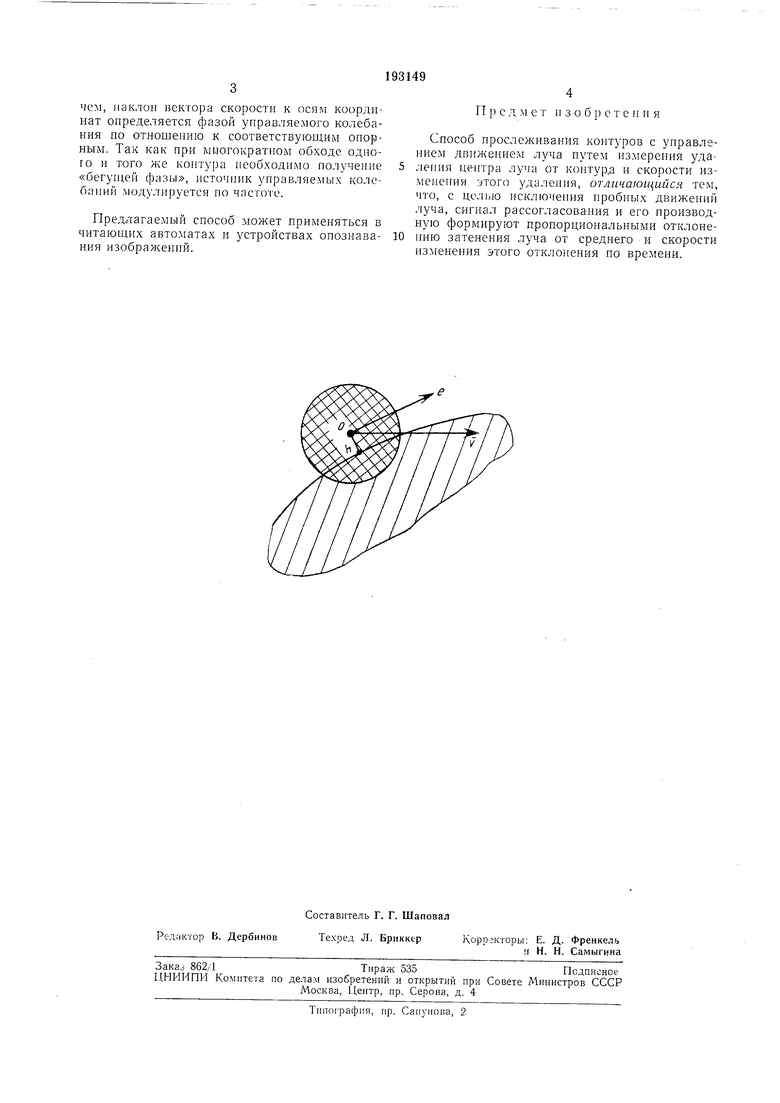
Информацию для обеспечения устойчивого перемещения луча вдоль контура в некоторый момент времени получают измерением скорости изменения удаления по времени и самого удаления h центра луча О.
Луч движется в произвольном нанравлении
с известной скоростью V. По отношению к направлению движения луча можно определить наполнение ближайшего к его центру элемента контура е и воздействовать на направление луча (эти воздействия пропорциональны кривизне), чтобы он устойчиво перемещался вдоль контура (см. чертеж).
Информация об удалении центра луча от контура и скорости изменения удаления могут быть получены путем оценки затенения изображением луча (всегда имеющего конечные размеры) и скорости изменения затенения по времени. При любом законе изменения иптенсивности от центра луча (если распределение интенсивности обладает центральиой симметрией) затенение луча изображением с прямолинейным (или с малой кривизной) контуром является строго монотонной функцией удале1ШЯ центра от контура, причем при малых по сравнению с радиусом луча удалениях эта функция с высокой точиостью лииейная.
Получение в реальных устройствах движения луча с постоянной скоростью в ноле зрения в произвольных направлепиях, не зависящих от координат, возможно, нанример, с помощью блок-схемы, которая осуществляет интегрирование проекцией требуемого по направлению вектора скорости на оси координат. Проекции вектора скорости нолучают перемнол ением двух опорных ортогональных синусоидальных напряжений п синусоидального напряжения той же частоты, но с управлячем, наклон вектора скорости к осям координат определяется фазой управляемого колебапия по отношепию к соответствующим опорным. Так как при миогократном обходе одного и того же контура необходимо получение «бегущей фазы, источник управляемых колебаний моду.тируется по частоте.
Предлагаемый способ может применяться в читающих автоматах и устройствах опознавания изображений.
ГТ |) с д м е т и 3 о б р е т е н и я
Способ прослеживания контуров с уиравлением движением луча путем измерения удалег1ия центра луча от контур.а и скорости изменения этого удаления, отличающийся тем, что, с ц. исключе1Н1я нробных движений луча, сигнал рассогласования и его нроизводную формируют пропорциональными отклонению затенения луча от среднего и скорости изменения этого отклонения по времени.