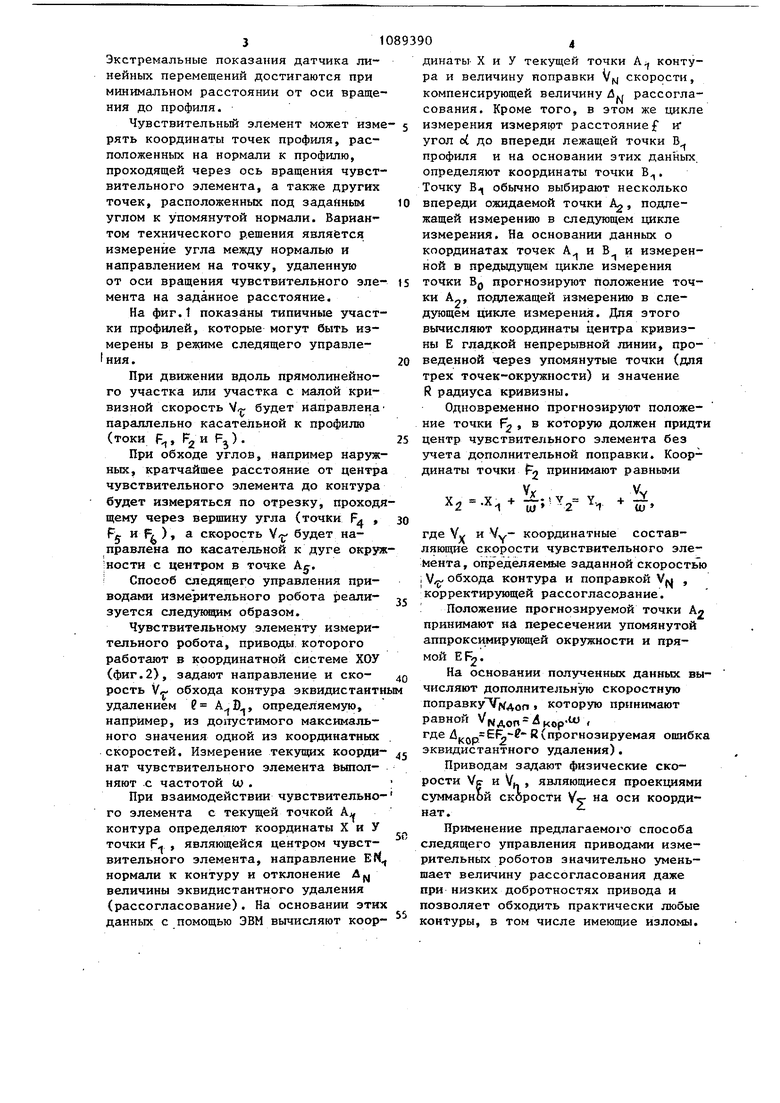
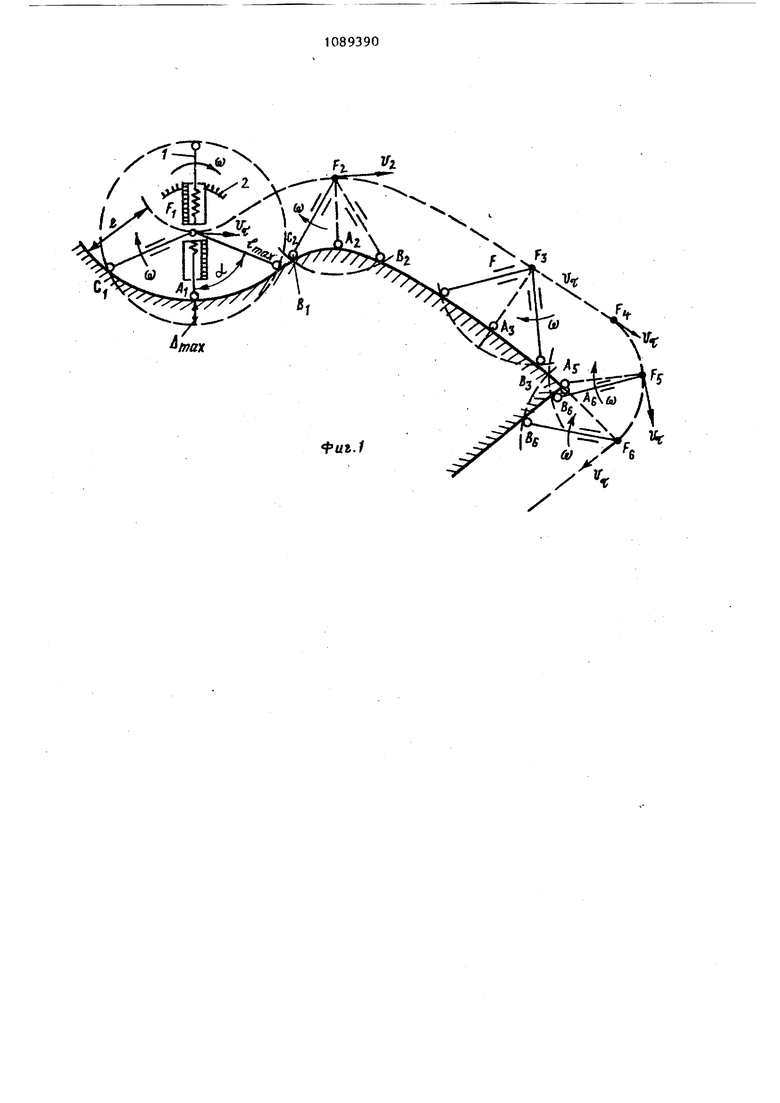
Изобретение относится к измерительной технике, а именно к способам управления приводами измерительных роботов, работающих в режиме следящего управления. Известны способы следящего управления приводами измерительных роботов, заключающиеся в том, что чувств тельному элементу задают направление и скорость перемещения по одной из координат (ведущей), измеряют коорди наты чувствительного элемента и вели чину отклонения (рассогласования) по второй (ведомой) координате, и задаю приводу ведомой координаты скорость, пропорциональную величине рассогласования С Способ прост в реализации, но использование приводов с низкой добротностью приводит к значительным ошибкам вследствие большой величины рассогласования и неустойчивости движения при изломах контролируемого контура. Обход замкнутого контура в декартовых координатах или контура с поднутрением в полярных координата без дополнительной информации невозможен . Наиболее близким к предлагаемому по технической сущности следящего управления приводами измерительных роботов, заключающийся в том, что чувствительному элементу задают направление и скорость обхода контура (по касательной к контуру) при задан ном эквидистантном удалении, периоди чески с заданной частотой измеряют в текущей точке координаты чувствительного элемента, направление норма ли к контуру и отклонение эквидистан кого удаления, определяют значение Vjvj составляющей скорости, направленной по нормали к контуру и корректирующей величину эквидистантного удаления, после чего изменяют значения скоростей в соответствии с найденной поправкой, которую принимают пропорциональной отклонению эквидистантного удаления С2 . Однако способ характеризуется недостаточной точностью, являющейся следствием низкой добротности привода, и неустойчивостью движения при изломах контролируемого контура. Цель изобретения - повышение точности обхода контура. Поставленная цель достигается согласно способу следящего управления приводами измерительных роботов. 902 заключающемуся в том, что чувствительному элементу задают направление и скорость обхода контура (по касательной к контуру) при заданном эквидистантном удалении, периодически с заданной частотой измеряют в текущей точке координаты чувствительного элемента, направление нормали к контуру и отклонение эквидистантного удаления (рассогласование) , определяют значение Vjvj составляющей скорости, направленной по нормали к контуру и корректирующей величину эквидистантного удаления, после чего изменяют величину координатных скоростей в соответствии с найденной поправкой, дополнительно измеряют в каждом цикле измерения координаты хотя бы одной впереди лежащей точки контура и на основании данных о координатах точек, измеренных в текущем и предьщущем циклах измерения, определяют дополнительную корректирующую скорость по нормали мд 5пкак расстояние по нормали точкой с координатами ; Y-bVy/io и эквидистантной к гладкой непрерывной линии, проведенной через п точек контура, полученных в текущем и предьщущем циклах измерения} V,,Vvзначения координатных скоростей без корректирующей поправки Ш частота циклов измерения; X ( V текущие координаты чувствительного элемента. На фигft представлена схема чувствительного элемента, реализзтощего способ; на фиг.2 - схема, поясняющая способ. Чувствительный элемент может быть выполнен в виде датчика 1 линейных перемещений контактного или бесконтактного типа, непрерьшно вращающегося (или качающегося) s плоскости измерения вокруг оси F с частотой W. Угловое положение вращающегося датчика измеряется с помощью Датчика 2 угловых перемещений. Во время взаимодействия чувствительного элемента с объектом измерения происходит измерение угла и модуля вектора текущего расстояния от оси вращения F до профиля объекта измерения. 31 Экстремальные показания датчика линейных перемещений достигаются при минимальном расстоянии от оси вращения до профиля. Чувствительный элемент может изме рять координаты точек профиля, расположенных на нормали к профилю, проходящей через ось вращения чувствительного элемента, а также других точек, расположенных под заданным углом к упомянутой нормали. Вариантом технического решения является измерение угла между нормалью и направлением на точку, удаленную от оси вращения чувствительного элемента на заданное расстояние. На фиг.1 показаны типичные участки профилей, которые могут быть измерены в режиме следящего управлеI ния. При движении вдоль прямолинейного участка или участка с малой кривизной скорость V будет нйправлена параллельно касательной к профилю (токи Я,, Fg и F). При обходе углов, например наружных, кратчайшее расстояние от центра чувствительного элемента до контура будет измеряться по отрезку, проходя щему через вершину угла (точки F , Ft Ир/), а скорость V-j- будет направлена по касательной к дуге окруж ;ности с центром в точке Aj. Способ следящего управления приводами измерительного робота реализуется следующим образом. Чувствительному элементу измерительного робота, приводы которого работают в координатной системе ХОУ (фиг.2), задают направление и скорость V обхода контура эквидистантн удалением Р А,D, определяемую, например, из допустимого максимального значения одной из координатных скоростей. Измерение текущих координат чувствительного элемента выполняют с частотой W. При взаимодействии чувствительного элемента с текущей точкой Aj контура определяют координаты X и У точки F- , являющейся центром чувствительного элемента, направление EN нормали к контуру и отклонение Ajg величины эквидистантного удаления (рассогласование). На основании этих данных с помощью ЭВМ вычисляют коор04динаты X и У текущей точки А;, контура и величину поправки скорости, компенсирующей величину й. рассогласования. Кроме того, в этом же цикле измерения измеряют расстояние f и угол oi до впереди лежащей точки В профиля и на основании этих данных, определяют координаты точки В, Точку В обьмно выбирают несколько впереди ожидаемой точки Ag, подлежащей измерению в следующем цикле измерения. На основании данных о координатах точек А и В и измеренной в предыдущем цикле измерения точки В прогнозируют положение точки А,,, подлежащей измерению в следующем цикле измерения. Для этого вычисляют координаты центра кривизны Е гладкой непрерывной линии, проведенной череэ упомянутые точки (для трех точек-окружиости) и значение R радиуса кривизны. Одновременно прогнозируют положение точки р2 которую должен придти центр чувствр5тельного элемента без учета дополнительной поправки. Координаты точки 2 принимают равными VxVy Y -. у + V Y + -.А + , -2 Il + ц, , где V,/ и VY координатные составляющие скорости чувствительного элемента, определяемые заданной скоростью ; V обхода контзфа и поправкой Vja , корректирующей рассогласозание. Положение прогнозируемой точки Ау принимают ни пересечении упомянутой аппроксимирующей окружности и прямой EF2. На основании полученных данных вычисляют дополнительную скоростную nonpaBKy Vf Aof,, которую принимают равной VNAon Kop- где R (прогнозируемая ошибка эквидистантного удаления), Приводам задают физические скорости Vg- и Vh , являющиеся проекциями суммарной скорости Vy на оси коордиПрименение предлагаемого способа следящего управления приводами измерительных роботов значительно уменьшает величину рассогласования даже при низких добротностях привода и позволяет обходить практически любые контуры, в том числе имеющие изломы. ft Ii .1 -- X,
СПОСОБ СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРИВОДАМИ ИЗМЕРИТЕЛЬНЫХ РОБОТОВ, заключающийся в том,, что чувствительно му элементу задают направление и скорость обхода контура (по касатель ной к контуру) при заданном эквидистантном удалении, периодически с заданной частотой измеряют в текущей точке координаты чувствительного элемента, направление нормали к кон туру и отклонение эквидистантного удаления (рассогласование), определяют значение Vj составляющей скорости, направленной по нормали к кон туру и корректирующей величину эквиТЕНИЯ дистантного удаления, после чего изменяют величину координатных скороетей в соответствии с найденной поправкой, отличающийся тем, что, с целью повышения точности обхода контура, дополнительно измеряют в каждом цикле измерения координаты хотя бы одной впереди лежащей точки,, контура и на основании данных о координатах точек, измеренных в текущем и предыдущем циклах измерения, определяет дополнительную корректирующую скорость по нормали как VNAOH- KOP где Лцор - расстояние по нормали между точкой с координатами X + Vjj/(JO,Y+VY/W и эквидистантной к гладкий непрерывной линии, проведенной через п точек контура, полученных в текущем и предыдущем циклах измерения; Vy ,VY - значения координатных скоростей без учета корректирующей поправки У(доп W - частота циклов измерения; Xi|Y- текущие координаты чувствительного элемента.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТОМАТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЙ | 0 |
|
SU328330A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРУБ С ВНУТРЕННИМ ВИНТООБРАЗНЫМ ОРЕБРЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2582842C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
