Известные радиотехнические устройства измерения дальности объектов при псевдошумовой модуляции сигнала, основанные на применении метода задержанной синхронизации с использованием цифровых дискриминаторов, выдают результат измерений в виде временного интервала. Это требует ари применении ЭЦВМ использования преобразователей типа «временной интервал-число, понижающих точность устройства. При большом удалении время поиска объекта доходит до минут и часов. Использование ЭЦВМ, для ввода целеуказаний и программных значений дальности объекта в измеритель требует применения преобразователей типа «число - аналог, что также не дает возможности повысить точ-ность измерений.
Предлагаемый способ отличается тем, что сигнал рассогласования между приходящей и местной Последовательностями, выделенный цифровым дискриминатором, преобразуется в пропорциональную частоту следования импульсов. Импульсы интегрируются реверсивным счетчиком преобразователя типа «числофаза, выходное напряжение которого используется для синхронизации местной последовательности. В этом случае результат измерений получается в виде -кода числа, записанного в реверсиВНом счетчике, и может быть выдан в ЭЦВМ без промежуточных преобразований. Установка априорных и программных значений измеряемой дальности объекта также осуществляется от ЭЦВМ без промел уточных преобразований, записью соответствующих кодовых значений в реверсивном счетчике этого преобразователя.
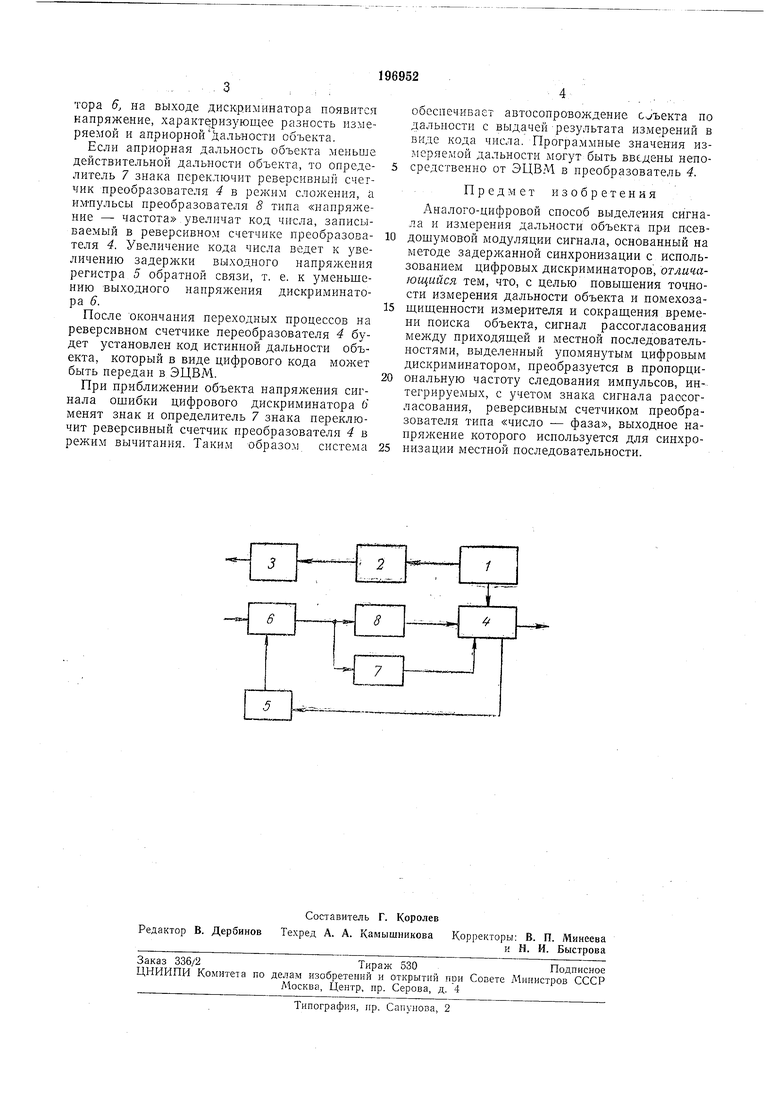
На чертеже приведена блок-схема устройства, реализующего предлагаемый способ.Синхронизатор 1 обеспечивает синхронизацию генератора 2 бинарной последовательности, вырабатывающего напрял сение, подаваемое на модулятор 3 передатчика и преобразователя 4 типа «число - фаза. Выходное напряжение преобразователя 4 синхронизирует
регистр 5 сдвига обратной связи. Код числа, установленный в реверсивном счетчике преобразователя 4, определяет временную задержку выходного напряжения регистра 5 обратной связи по отношению к выходному напряжению генератора 2 бинарной последовательности.
Если от ЭЦВМ априорное значение дальности объекта, выданное в виде «кода числа, установлено в преобразователе 4, то временная задержка выходного напряжения регистра 5 обратной связи будет соответствовать этой дальности. При временном расхождении напряжения регистра 5 обратной связи и входной последовательности, не превышающей
тора 6, на выходе дискриминатора появится напряжение, характеризующее разность измеряемой и априорнойДальности объекта.
Если априорная дальность объекта меньше действительной дальности объекта, то определитель 7 знака переключит реверсивный счетчик преобразователя 4 в режим сложения, а импульсы преобразователя 8 типа «напряжение - частота увеличат код числа, записываемый в реверсивно м счетчике преобразователя 4. Увеличение кода числа ведет к увеличению задержки выходного напряжения регистра 5 обратной связи, т. е. к уменьшению выходного напряжения дискриминатора 6.
После окончания переходных процессов на реверсивном счетчике переобразователя 4 будет установлен код истинной дальности объекта, который в виде цифрового кода может быть передан в ЭЦВМ.
При приближении объекта напряжения сигнала ошибки цифрового дискриминатора 6 менят знак и определитель 7 знака переключит реверсивный счетчик преобразователя 4 в режим вычитания. Таким образол система
ооеспечивает автосопровождение Сч.;ъекта по дальности с выдачей результата измерений в виде кода числа. Программные значения из.меряемой дальности могут быть введены непосредственно от ЭЦВМ в преобразователь 4.
Предмет изобретения
Аналого-цифровой способ выделения сигнала и измерения дальности объекта при псевдошумовой модуляции сигнала, основанный на методе задержанной синхронизации с использованием цифровых дискриминаторов, отличающийся тем, что, с целью повышения точности измерения дальности объекта и помехозаш;ищенности измерителя и сокращения времени поиска объекта, сигнал рассогласования между приходящей и местной последовательностями, выделенный упомянутым цифровым дискриминатором, преобразуется в пронорциональнзю частоту следования импульсов, интегрируемых, с учетом знака сигнала рассогласования, реверсивным счетчиком преобразователя типа «число - фаза, выходное напряжение которого используется для синхронизации местной последовательности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ | 1967 |
|
SU196119A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛНОЙ РАЗНОСТИ ФАЗ ПО «НЕСУЩЕЙ» ЧАСТОТЕ ПСЕВДОП1УМОВЫХ СИГНАЛОВ | 1972 |
|
SU331335A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Устройство для стабилизации средней частоты шумовых выбросов над пороговым уровнем | 1980 |
|
SU902269A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| Цифровое устройство фазовой синхронизации | 1985 |
|
SU1246395A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АППАРАТНОЙ ЗАДЕРЖКИ ВЫХОДНОГО СИГНАЛА ПЕРЕДАТЧИКА | 2015 |
|
RU2581767C1 |
