Паровоздушный молот, включающий станину с бабой, распределительный золотник, рабочий и управляющий цилиндры, соединенные с распределительным золотником, известен.Предложенный молот отличается от известного тем, что он снабжен набором параллельно соединенных между собой и настроенных на различное давление редукторов-задатчиКОВ, связанных с воздухораспределителями, соединенными с клапанами, которые кинематически связаны с кулачковым командоаппаратом, снабженным храповым механизмом, приводимым в действие силовым цилиндром. Полости последнего соединены с соответствующими полостями крана управления, установленного на станине и соединенного с управляющим цилиндром и с воздухораспределителями и кинематически связаииого с бабой.
Такое выполнение молота позволяет программировать его работу по чередующимся ударам различной энергии в зависимости от требуемой технологии.
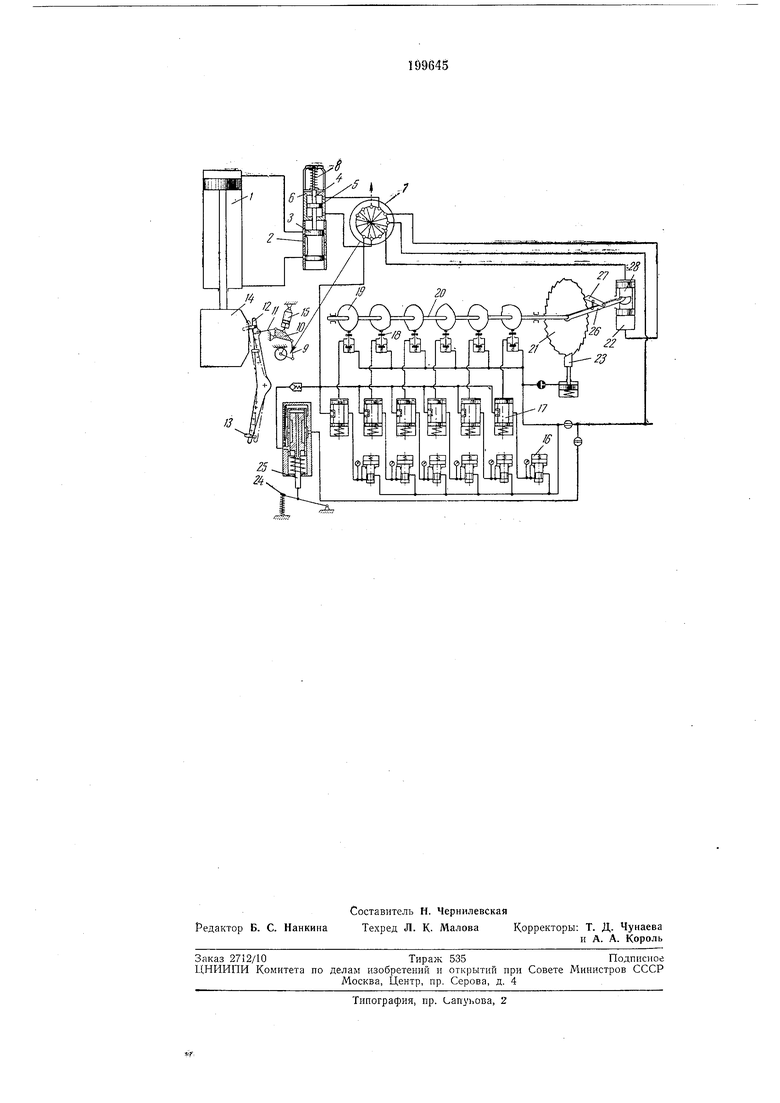
Па чертеже изображена принципиальная схема предложенного наровоздушиого молота.
связан со скалкой 4 и поршнем 5 управляющего цилиндра 6. Полости последнего сообщаются с соответствующими полостями крана 7.унравления. Па верхнем конце скалки расположена;:пружина 8, которая устанавливает золотнш : 5 в несходное положение.
Крап 7 системой тяг и рычагов 9, // и И связан -с коромыслом 12, на котором имеются переставные сухари 13, скользящие по соответствующим скосам на бабе 14. Фиксация отдельных ноложений крана 7 управления достигается амортизатором 15.
Для перемещения золотника 3, потребного для получения необходимой энергии удара, в нижнюю полость управляющего цилиндра б подается регулируемое давление от сервопривода или программного устройства через кран 7.
Программное устройство состоит из редукторов-задатчиков давления 16, воздухораспределителей П, усиливающих пневматический сигнал, поступающий от трехходовых клапанов 18, связанных с кулачками 19, которые устанавливаются на вал 20 со сдвигом один относительно другого на угол, равный одному делению храпового диска 21. Количество редукторов-задатчиков, воздухораспределителей, трехходовых клапанов, кулачков и зубьев храиового диска соответствует количеству ирограммируемых ударов. Поворот вала 20 с кулачками 19 производится пневматическим цилиндром 22, полости которого соединяются с полостями крана 7 управления. Тормоз 23 удерживает храповой диск 21 от поворота при возврате собачки. 5 Молот работает следующим образом. Перед нанесением удара баба 14 находится в верхнем положении. Для нанесения удара необходимо нажать на педаль 24 сервопривода, при этом золот- 10 ник 25 сервопривода перемещается вниз и посылает сигнал в виде определенного давлеПИЯ в полость регулируемого давления крана управлеиия 7. При этом поршень 5 управляющего цилиндра 6 перемещается вверх, ежи- 15 мая пружииу 8. Золотник 3 неремещается вверх и сообщает нижнюю полость рабочего цилиндра / с атмосферой. Баба 14 падает вниз. В крайнем нижнем положении баба своим нижним скосом воздействует через 20 нижний сухарь 13 па коромысло 12. Кран управления цри этим сообщает верхнюю полость управляющего цилипдра 6 с магистралью, а иижиюю - с атмосферой. Поршень 5 управляющего цилиндра перемещает скал- 25 ку 4 и золотник 3 вниз. Последний открывает доступ энергоносителю в нижнюю полость рабочего цилиндра /. Производится подъем бабы 14. В верхнем положении бабы нижняя по- 30 лость управляющего цилиндра 6 сообщена с полостью регулируемого давления краиа 7. Если педаль 24 сервопривода нажата, то происходит повторный удар. Если же недаль отпущена, то баба 14 остается в верхнем по- 35 ложении. Энергия удара определяется разностью между энергией свободного падения бабы 14 и работой выпуска энергоносителя из нижней полости рабочего цилиндра / через щель в золотниковой коробке 2 переменной 40 площади. Для нанесения серии запрограммированных (по величине энергии удара в определенной последовательности) ударов к полости регулируемого давления крана управления 45 параллельно с сервоприводом и между собой подсоединены через воздухораспределители 17 редукторы-задатчики 16, настраиваемые на определенное давление, соответствующее необходимому перемещению золотника 3. Команда на включение воздухораспределителей 17 и редукторов-задатчиков 16 подается через трехходовые клапаны 18 от кулачков 19, расположенных на валу 20, поворот кото50рого осуществляется пневматическим цилиндром 22 черйо рычаг 26, собачку 27 и храновой диск 21. Первый удар из серии запрограммированных ударов наносится нажатием педали 24 сервопривода. При этом баба 14 падает вниз. При нижнем положении бабы и соответствующем положении краиа управления иижняя полость пиевмоцилиндра 22 сообщается с магистралью, а верхняя - с атмосферой, При этом золотник 28 перемещается вверх и поворачивает храповое колесо (диск) 21 на одно деление. Один из кулачков 19 иабегает своим профилем на кнопку клапана 18 и переключает его, сообщая редуктор-задатчик 16 с иолостью регулируемого давления крана управления. При движении бабы вверх коромысло 12 и кран 7 управления занимают положение, при котором нижняя полость пневмоцнлиндра 22 сообщается с атмосферой, а золотиик 28, перемещаясь вниз, возвращает собачку 27 хранового диска 21 назад. Нижняя полость управляющего цилиндра 6 сообщается с полостью регулируемого давления крана управления, а верхняя - с атмосферой. Золотник 3 перемещается вверх, и баба 14 падает. Далее цикл повторяется в последовательности, определяемой расстановкой кулачков на валу. Предмет изобретения Паровоздушный молот, включающий станипу с бабой, распределительный золотник, рабочий и управляющий цилиндры, соединенные с распределительным золотником, отличающийся тем, что, с целью программирования работы молота по чередующимся ударам различной энергии в зависимости от требуемой технологии, он снабжен набором параллельио соединенных между собой и настроенных на различное давление редукторов-задатчиков, связанных с воздухораспределителями, соединенными с клапанами, которые кинематически связаны с кулачковым командоаппаратом, снабженным храповым механизмом, приводимым в действие силовым цилиндром, полости которого соединены с соответствующими полостями крана управления, установлеииого на станине и соединенного с управляющим цилиндром и с воздухораспределителями и кинематически связанного с бабой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОЭЛЕКТРИЧЕСКОЬ УСТРОЙСТВО УПРАВЛЕНИЯ КОВОЧНЫМ МОЛОТОМ | 1968 |
|
SU208422A1 |
| ВЫГРУЖАЮЩЕЕ УСТРОЙСТВО МЕХАНИЧЕСКОЙ РУКИ К ВЫСОКОСКОРОСТНОМУ МОЛОТУ | 1971 |
|
SU294663A1 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ | 1972 |
|
SU348268A1 |
| ПАРОВОЗДУШНЫЙ ШТАМПОВОЧНЫЙ МОЛОТ | 1967 |
|
SU204868A1 |
| Устройство программного управления паровоздушными молотами | 1960 |
|
SU133737A1 |
| ПАРОВОЗДУШНЫЙ КОВОЧНЫЙ молот | 1968 |
|
SU206981A1 |
| ВЫСОКОСКОРОСТНОЙ МОЛОТ | 1973 |
|
SU368921A1 |
| Система управления паровоздушным молотом | 1974 |
|
SU512846A1 |
| Устройство управления | 1974 |
|
SU735830A1 |
| Пневмогидравлический молот | 1971 |
|
SU424648A1 |