Предлагаемое изобретение относится к области создания абсолютной невесомости во время полета самолета-лаборатории но траектории невесомости.
В настоящее время известны системы обеснечеиия невесомости, близкой к абсолютной, нредставляюище собой промышлеиную телевизиоиную систему замкнутого контура. Такая система слежения позволяет визуалыГо регистрировать отклонения испытуемого объекта от нейтрального ноложения {характеризуемого состоянием абсолютной невесомости на объекте), но не дает возможности регистрировать отклонения иснытуемого объекта от нейтрального положения количественно и тем самым корректировать траекторию невесомости при помощи автонилота.
Кроме того, при ирименении телевизиоииой системы слежения испытуемый объект ие закрепляется и ие исключены случаи его ударов о пол и стеиы кабины самолета.
Таким образом, целью настоящего изобретения является обеспечение невесомости, близкой к абсолютной, путем корректирования траектории невесомости летчиком или автопилотом, а также увеличение периода пребывания объектов в состоянии певесомости вплоть до всего времени полета самолета по траекторип невесомости.
Сущность изобретения заключается в разработке системы, позволяющей корректировать траекторию невесомости таким образом, что испытуемый объект поддерживается в состоянии невееомости, близкой к абсолютной, путем прикреиления его к конструкции самолета гибкими демпфироваииыми связями, в которые вмонтированы потенциометрические датчики, выдающие сигнал на приборы-указатели величины линейного смещения объекта от нейтрального положения.
Для освобождения объекта от жестких связей с конструкцией самолета вне отсека, в котором свободно плавает объект, установлен
механизм освобождеиия. Последний выполнен в виде гидравлического силового цилиндра с блоками роликов, между которыми проходит лента, одним коицом прикренлениая к иепытуемому объекту, а другим - к механизму
освобождения.
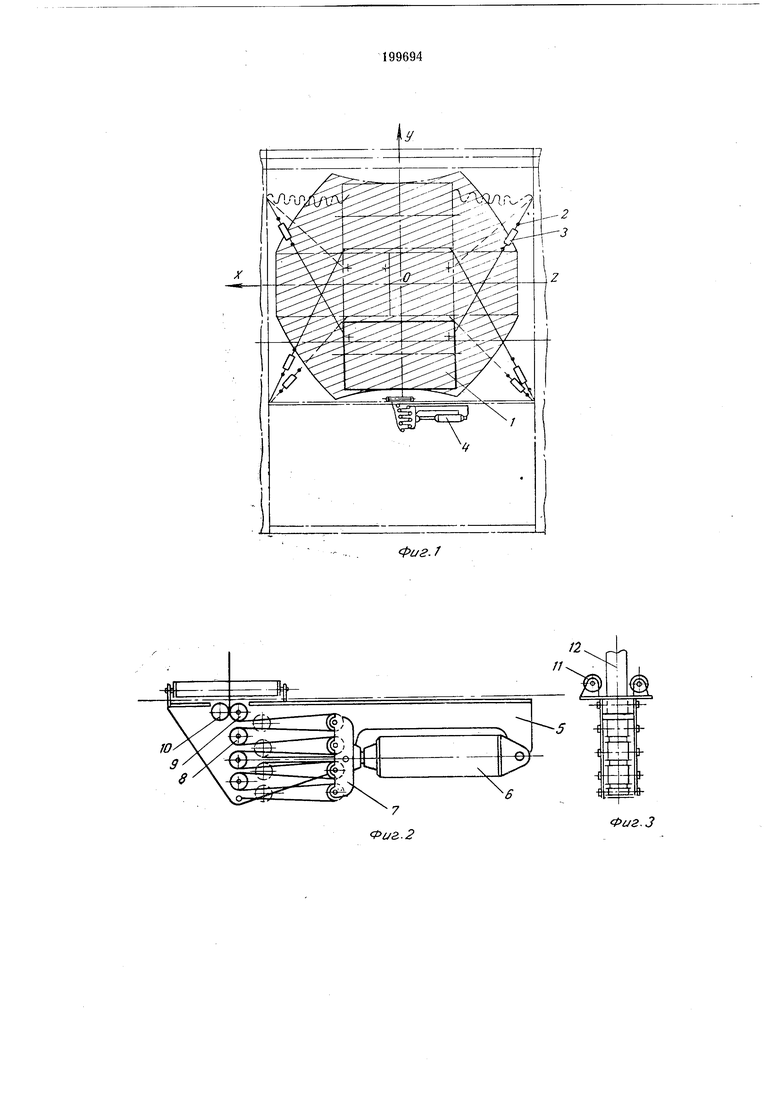
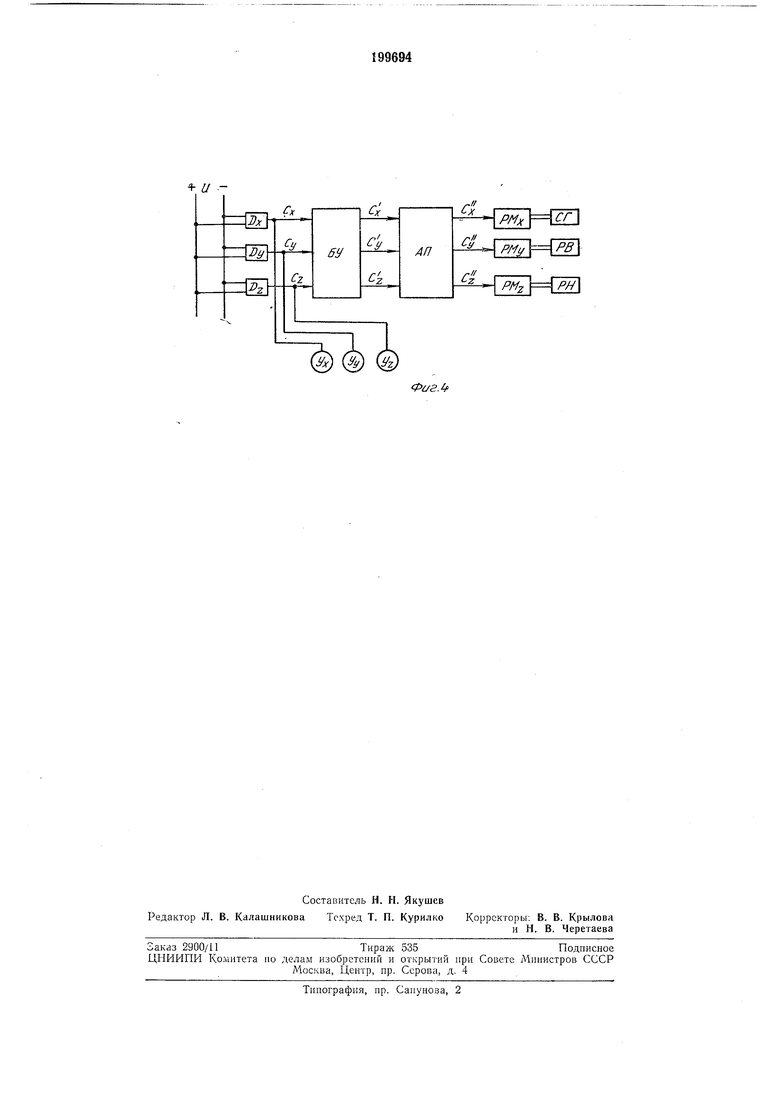
На фиг. 1 схематически изображена установка испытуемого объекта, общий вид; на фиг. 2 - механизм освобождения объекта; на фиг. 3 - лента с направляющими роликами мехаиизма освобождения; иа фиг. 4 - блок-схема слежения за объектом при включенном автоиилоте.
чиков 3 смещения объекта от нейтрального положения представляет собой резиновые шнуровые амортизаторы в сочетании с потенциометрическими датчиками перемещения (на чертеже не показаны), питающимися от электросети самолета.
Механизм 4 освобождения испытуемого объекта включает в себя станину 5 (см. фиг. 2), на которой смонтирован гидроцилиндр 6. На щтоке гидроцилиндра установлена подвижная обойма 7 с роликами. Кроме того, на станине установлены неподвижные ролики 8, подтягивающий ролик 9, прижимной 10 и направляющие ролики //. Рабочим элементом механизма является капроновая лента 12. Лента постоянно натянута на системе роликов благодаря подтягивающему ролику 9, приводимому от специального малоинерционного двигателя (на чертеже не показан).
Верхним концом лента крепится к испытуемому объекту /, проходит через систему подвижных и неподвижных роликов и другим концом крепится к станине.
Работает система обеспечения невесомости следующим образом.
При выходе самолета-лаборатории на траекторию невесомости в гидроцилиндр 6 подается под давлением рабочая жидкость, в результате чего испытуемый объект освобождается от жестких связей с конструкцией самолета и приходит в нейтральное положение. При отклонении объекта от нейтрального положения система потенциометрических датчиков 3 выдает электрический сигнал (величина которого однозначно связана с величиной линейного смещения объекта по соответствующей оси X, У или Z) на приборы - указатели смещения. Пилот вручную или через
автопилот воздействует на соответствующие рули или сектор газа самолета и приводит испытуемый объект в нейтральное положение.
В случае управления самолетом с помощью автопилота первичные электрические сигналы Сл:, у, г, из нотенциометрических датчиков Ох,у,г поступают в блок усилителя БУ, затем в автопилот АП через исполнительные
механизмы PM.,y,z сектора газа СГ, руля высоты РВ и руля направления РН.
Предмет изобретения
1.Система обеспечения невесомости, близкой к абсолютной, на самолете-лаборатории, состоящая из гибких демпфированных связей, которыми испытуемый объект прикреплен к
конструкции самолета, отличающаяся тем, что, с целью регистрации отклонений испытуемого объекта от нейтрального положения, характеризуемого абсолютной невесомостью на объекте во время полета по траектории невесомости, в каждую из связей вмонтирован потенциометрнческий датчик, выдающий сигнал о величине линейного смещения объекта на приборы-указатели или в автопилот.
2.Система по п. 1, отличающаяся тем, что, с целью освобождения объекта от жестких
связей с конструкцией самолета, вне отсека, в котором свободно плавает объект, установлен механизм освобождения, выполненный в виде гидравлического силового цилиндра с блоками роликов, между которыми проходит лента, прикрепленная одним концом к испытуемому объекту, а другим - к механизму освобождения.
Фиг.7
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУЛЬТ, СИСТЕМА И СПОСОБ РУЧНОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) "АРЖЕСАН" | 1996 |
|
RU2128600C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| ШТУРВАЛЬНАЯ КОЛОНКА САМОЛЕТА | 2007 |
|
RU2356793C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СОВЕРШЕНСТРУЮЩИЙ СОСТОЯНИЕ ИСКУССТВЕННОЙ НЕВЕСОМОСТИ И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 1995 |
|
RU2099256C1 |
| СПОСОБ И УСТРОЙСТВО ОГРАНИЧЕНИЯ УГЛА АТАКИ И ПЕРЕГРУЗКИ САМОЛЕТА | 2002 |
|
RU2248304C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЁТОМ ДЛЯ РЕАЛИЗАЦИИ АВТОМАТИЧЕСКОГО ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ТЯЖЁЛЫХ ГРУЗОВ | 2021 |
|
RU2775957C1 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
Ю
t
7
Фаг.З Фиг. 2
