Изобретение относится к области авиации и может быть использовано в работе пилотажно-навигационного оборудования летательных аппаратов.
Десантирование тяжелых грузов (весом более 10000 кг) в настоящее время выполняется только в режиме ручного управления, при котором пилот должен строго следовать указаниям по технике пилотирования, приведенным в руководстве по летной эксплуатации (РЛЭ). Как правило, десантирование тяжелых грузов выполняется различными способами: одиночно, серией и цугом. Контроль процесса выполнения режима десантирования выполняет техник по авиационному десантированию (АДО) и командир экипажа. Для выполнения десантирования тяжелых грузов в штурвальном режиме управления требуется специальная подготовка экипажей при этом весьма высоко влияние человеческого фактора.
Известно авторское свидетельство СССР №1840016 от 02.01.1986 г., в котором описан способ пилотирования самолета при десантировании моногруза большой массы, сравнимой с массой самолета. Способ включает полет на установившемся режиме, выполнение противоперегрузочного маневра и последующий перевод самолета в установившийся режим полета. При этом противоперегрузочный маневр выполняют непосредственно перед началом страгивания груза, переводя самолет в пикирование с перегрузкой 0<n<1, где n значение перегрузки.
Недостатком известного решения является то, что управление самолетом при проведении способа осуществляется в ручном управлении, что ведет за собой повышение нагрузки на экипаж, повышает риск неудачного десантирования за счет «человеческого фактора» при проведении противоперегрузочного маневра.
Известен патент на изобретение РФ №2204106 от 19.04.2001 г., в котором описан способ прицеливания при бомбометании с летательного аппарата по наземным целям и при десантировании объектов. Способ обеспечивает возможность прицеливания в любое время суток и в любых метеоусловиях. Это достигается тем, что предварительно на наземном пункте определяют географические координаты его местоположения, в вычислитель наземного пункта вводят цифровую карту местности с высотой ее рельефа, угол магнитного склонения. В вычислитель летательного аппарата предварительно вводят баллистическую информацию, угол магнитного склонения. В ходе прицеливания на наземном пункте измеряют координаты наземной цели относительно наземного пункта, вычисляют географические координаты наземной цели и передают их на летательный аппарат по радиоканалу. На летательном аппарате принимают географические координаты наземной цели и радиоизлучение от искусственных спутников Земли системы спутниковой навигации, определяют географические координаты местоположения летательного аппарата и путевую скорость W, измеряют текущие значения высоты Н и скорости V полета, магнитного азимута и угла тангажа продольной оси летательного аппарата, углов атаки и скольжения летательного аппарата. По этой информации на летательного аппарата вычисляют текущие значения скорости цели, скорости ветра, требуемые значения дальности Fтр между летательным аппаратом и наземной целью в момент сброса десантируемого объекта и бортового угла Fтр наземной цели, текущие значения дальности между летательного аппарата и наземной цели и бортового угла F наземной цели, текущие значения разностей dД между Дтр и Д и dF между Ftp и F, изменяют направление полета летательного аппарата до получения нулевого значения величиной dF и сбрасывают десантируемый объект при достижении нулевого значения величиной dД.
Недостатком известного решения является то, что управление самолетом при проведении способа осуществляется с участием стороннего оборудования, расположенного на наземном пункте и в системе спутниковой навигации, а так же то, что наличие помех в радиосвязи с этим оборудованием может сделать осуществление способа невозможным. Так же к недостаткам известного способа относится то, что в документы не прописаны алгоритмы работы вычислителей при совершении противоперегрузочных маневров при сбросе груза большой массы.
Задачей на решение которой направлен заявляемый способ управления самолетом является повышение эффективности, качества и безопасности десантирования тяжелых грузов.
Заявляемый способ управления основан на реализации возможности изменения эффективности управляющего сигнала системы автоматического управления (САУ) в зависимости от массы и расстояния, проходимого грузами по грузовому отсеку, а также в зависимости от величины рассогласования между текущей и заданной высотой полета.
Поставленная задача решается путем использования способа управления самолетом для реализации автоматического парашютного десантирования тяжелых грузов включающий полет на установившемся режиме, нахождение цели десантирования, выполнении противоперегрузочного маневра, страгирование груза и последующий за страгированием груза перевод самолета в установившийся режим полета. При этом управление осуществляется в автоматическом режиме путем управляющего сигнала бортового вычислителя автопилота на рулевую машину автопилота для отклонения руля высоты и стабилизаторов в режиме стабилизации заданной высоты десантирования. Для формирования управляющего сигнала на руль высоты в вычислителе используются данные о рассогласовании между заданными и текущими параметрами полета с датчиков барометрической высоты, угла наклона траектории, вертикальной скорости и угловой скорости, а так же данные об изменении массы и балансировки самолета после страгивания груза.
Применение вышеуказанного способа, за счет автоматизации процесса, позволяет облегчить работу экипажа при десантировании, повышает точность и безопасность десантирования тяжелых грузов за счет исключения «человеческого фактора» при совершении противоперегрузочных маневров, а также за счет учета фактора изменения массы и центровки самолета в процессе движения грузов по грузовой кабине и их отделения от самолета.
Реализация способа поясняется на следующих примерах и рисунках.
На Фиг. 1 показана схема информационного взаимодействия между бортовым вычислителем 1, датчиками страгивания грузов 2 (гнездо 11), 3 (гнездо 6), механизмом перемещения стабилизатора 4 и рулевой машиной автопилота, формирующей управляющий сигнал на руль высоты 5, руль высоты 6, стабилизатор 7, датчик барометрической высоты 8, датчик угла наклона траектории 9, датчик вертикальной скорости 11, датчик угловой скорости тангажа 12.
Бортовой вычислитель 1 формирует управляющие сигналы автопилота на рулевую машину автопилота 5 для отклонения руля высоты 6 в режиме стабилизации заданной высоты десантирования. Для формирования управляющего сигнала на руль высоты в вычислителе используются сигналы с датчиков: 8 - барометрической высоты, 9 - угла наклона траектории, 10 - вертикальной скорости, 11 - угловой скорости тангажа.
При страгивании груза с 6-ого гнезда формируется команда датчика 3, по которой в вычислителе 1 формируется и передается на механизм перестановки стабилизатора 4 закон перестановки стабилизатора в зависимости от текущего значения приборной скорости и признака номера гнезда.
По признаку страгивания груза с 11-ого гнезда сигнал страгивания груза с 6-ого гнезда блокируется.
При страгивании груза с 11-ого гнезда формируется команда датчика 2, по которой в вычислителе 1 формируется и передается на механизм перестановки стабилизатора 4 закон перестановки стабилизатора в зависимости от текущего значения приборной скорости и признака страгивания груза с 11-ого гнезда.
Основная задача управления сводится к стабилизации заданной высоты десантирования (Нзад) в процессе движения и схода грузов путем совершения противоперегрузочного маневра. На Фиг. 2 поясняется алгоритм работы способа. Способ управления сводится к выполнению бортовым вычислителем 1 летательного аппарата следующих действий:
1) Определение рассогласования между текущей (Н) и заданной (Нзад) барометрической высотой  ;
;
2) Определение расстояния (Lц) между вектором траекторной скорости самолета и направлением на воображаемую точку, находящуюся на заданной высоте полета:

где: Lцmax - максимальное значение параметра Lц, определяющее заданное качество стабилизации высоты десантирования при ΔH = 0 (нет ошибки стабилизации),
LЦmin - минимальное значение параметра Lц, определяющее максимальное повышение строгости стабилизации заданной высоты десантирования при ΔН = ΔНmax (ΔНmax - максимально допустимая ошибка стабилизации высоты).
3) Определение скорости изменения угла наклона траектории ( ) и угловой скорости тангажа (
) и угловой скорости тангажа ( )
)
4) Определение угла (и скорости его изменения) между вектором траекторной скорости самолета и направлением на воображаемую точку, которая движется на заданной высоте и заданном удалении от центра масс самолета

где: Θ - угол наклона траектории,
 - скорость изменения угла наклона траектории,
- скорость изменения угла наклона траектории,
Vy - вертикальная скорость.
5) Определение позиционной составляющей управляющего сигнала САУ на руль высоты

где:  - коэффициенты усиления.
- коэффициенты усиления.
6) Определение интегральной составляющей управляющего сигнала САУ на руль высоты

где:  - управляющий сигнал на текущем (i-том) шаге управляющих воздействий,
- управляющий сигнал на текущем (i-том) шаге управляющих воздействий,
 - управляющий сигнал на предыдущем (i-1) шаге управляющих воздействий,
- управляющий сигнал на предыдущем (i-1) шаге управляющих воздействий,
 - коэффициенты усиления.
- коэффициенты усиления.
7) Определение суммарного управляющего сигнала САУ на руль высоты:
где: Kσ - коэффициент коррекции суммарного управляющего сигнала в зависимости от величины приборной скорости полета,
 - коэффициент усиления интегральной части управляющего сигнала. При этом суммарный управляющий сигнал САУ на руль высоты ограничивается величиной
- коэффициент усиления интегральной части управляющего сигнала. При этом суммарный управляющий сигнал САУ на руль высоты ограничивается величиной 
8) Для предотвращения выхода управляющего сигнала за заданное ограничение  , по признаку страгивания груза (признак формируется по сигналу с датчика страгивания груза), формируется упреждающий сигнал на стабилизатор ΔϕСТ (ХГР, VПР), зависящий от места страгивания груза (Хгр) и приборной скорости (Vпр)
, по признаку страгивания груза (признак формируется по сигналу с датчика страгивания груза), формируется упреждающий сигнал на стабилизатор ΔϕСТ (ХГР, VПР), зависящий от места страгивания груза (Хгр) и приборной скорости (Vпр)

где: ϕСТ0 - начальное положение стабилизатора к моменту времени страгивания груза.
Чем дальше груз от точки схода (увеличивается дистанция перемещения груза по грузовой кабине) и чем меньше приборная скорость, тем больше величина упреждающего сигнала на стабилизатор.
9) Если в процессе движения груза по грузовой кабине суммарный управляющий сигнал САУ на руль высоты достигает заданного ограничения на пикирование  , где:
, где: , то упреждающий сигнал на стабилизатор ΔϕСТ (XГР, VПР) увеличивается на специальный добавок
, то упреждающий сигнал на стабилизатор ΔϕСТ (XГР, VПР) увеличивается на специальный добавок 

10) Движение стабилизатора прекращается по условию отработки заданной порции перемещения Δϕст + Δϕст спец. и условию изменения знака управляющего сигнала на руль высоты на отрицательный (кабрирование):

В местах размещения грузов (в гнездах) устанавливаются датчики страгивания груза. Датчики страгивания формируют три вида сигналов, а именно 1 (груз установлен, контакты датчика замкнуты) и 0 (груза нет, контакты датчика разомкнуты). Таким образом, смена сигнала 1-0 является признаком страгивания груза.
При наличии грузов в 6-ом и 11-ом гнездах до страгивания грузов состояние сигналов с датчиков:

При страгивании груза с 6-ого гнезда состояние сигналов с датчиков меняется на:

По сигналу с датчика страгивания груза с 6-ого гнезда (1-0) формируется сигнал на отключение режима автобалансировки, списывания балансировочного сигнала и формируется упреждающий сигнал на стабилизатор по признаку страгивания груза с 6-ого гнезда

При страгивании груза с 11 -ого гнезда состояние сигналов с датчиков меняется на

По сигналу с датчика страгивания груза с 11-ого гнезда (1-0) формируется сигнал на отключение режима автобалансировки, списывания балансировочного сигнала и формируется упреждающий сигнал на стабилизатор по признаку страгивания груза с 11-ого гнезда


По признаку страгивания груза с 11-ого гнезда сигнал с 6-ого гнезда блокируется.
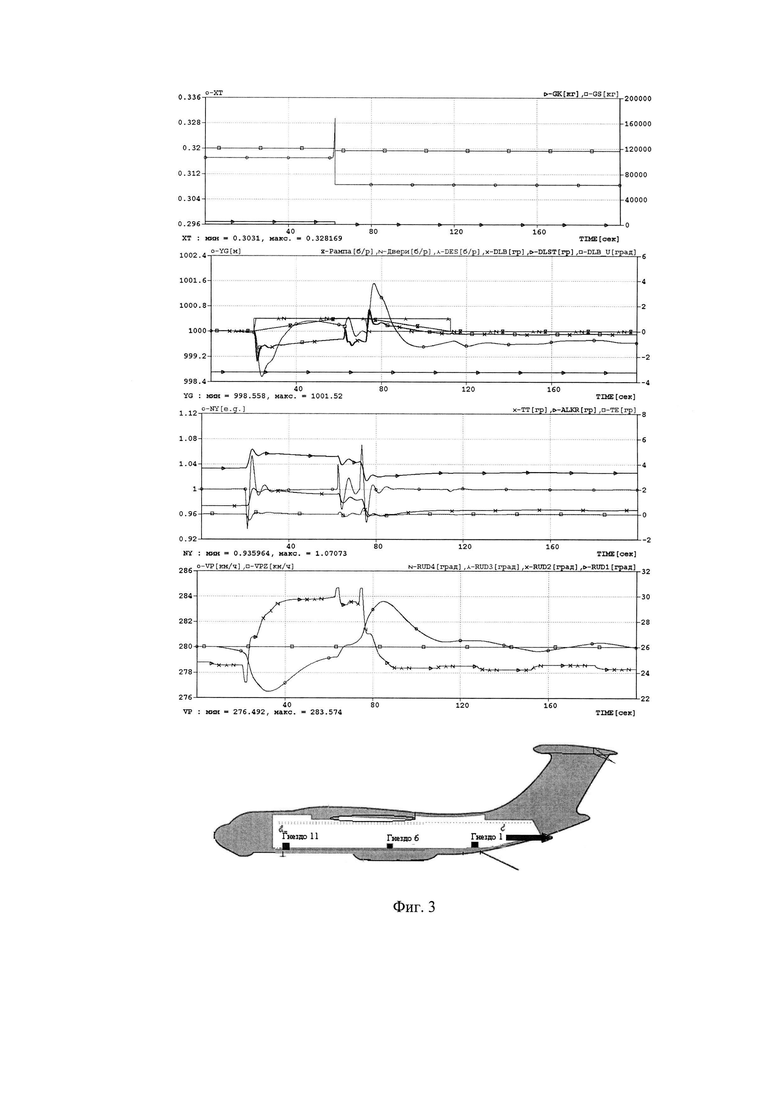
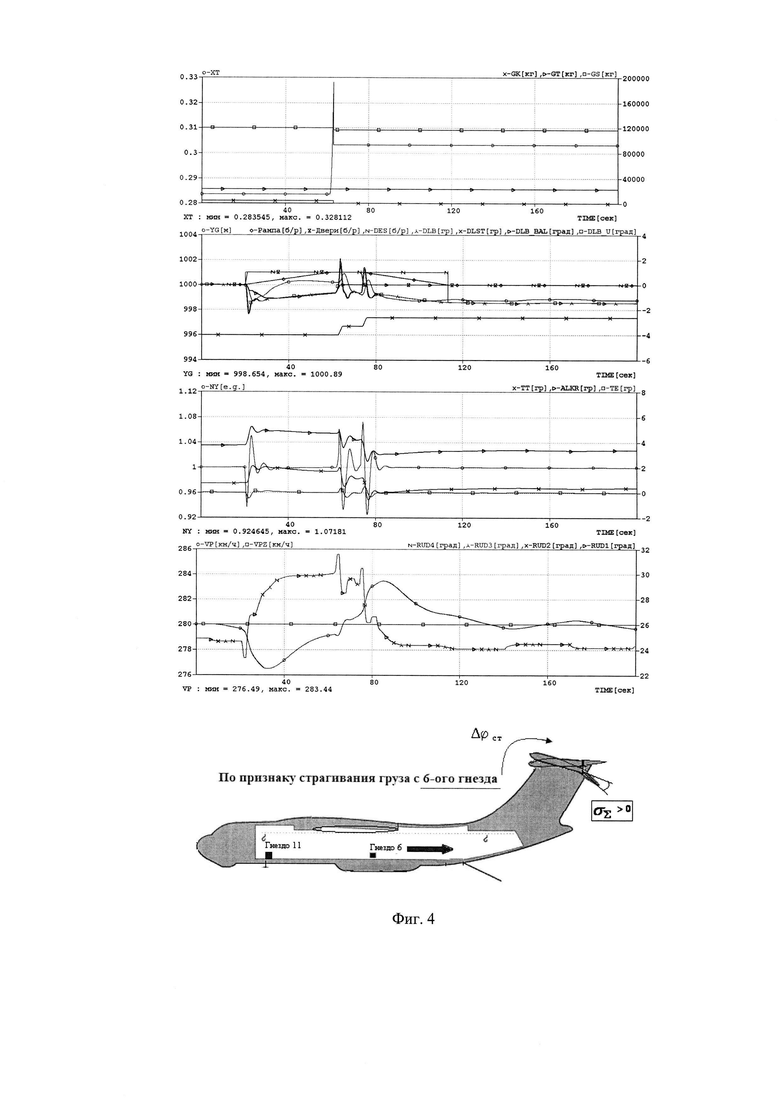
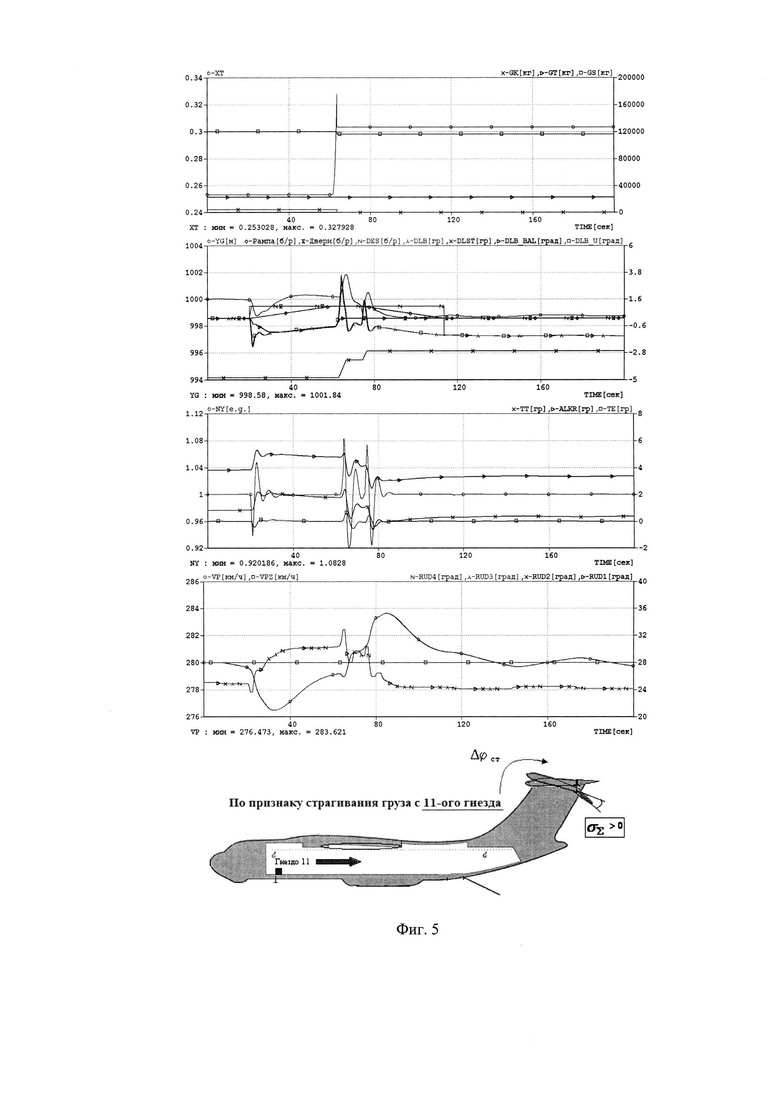
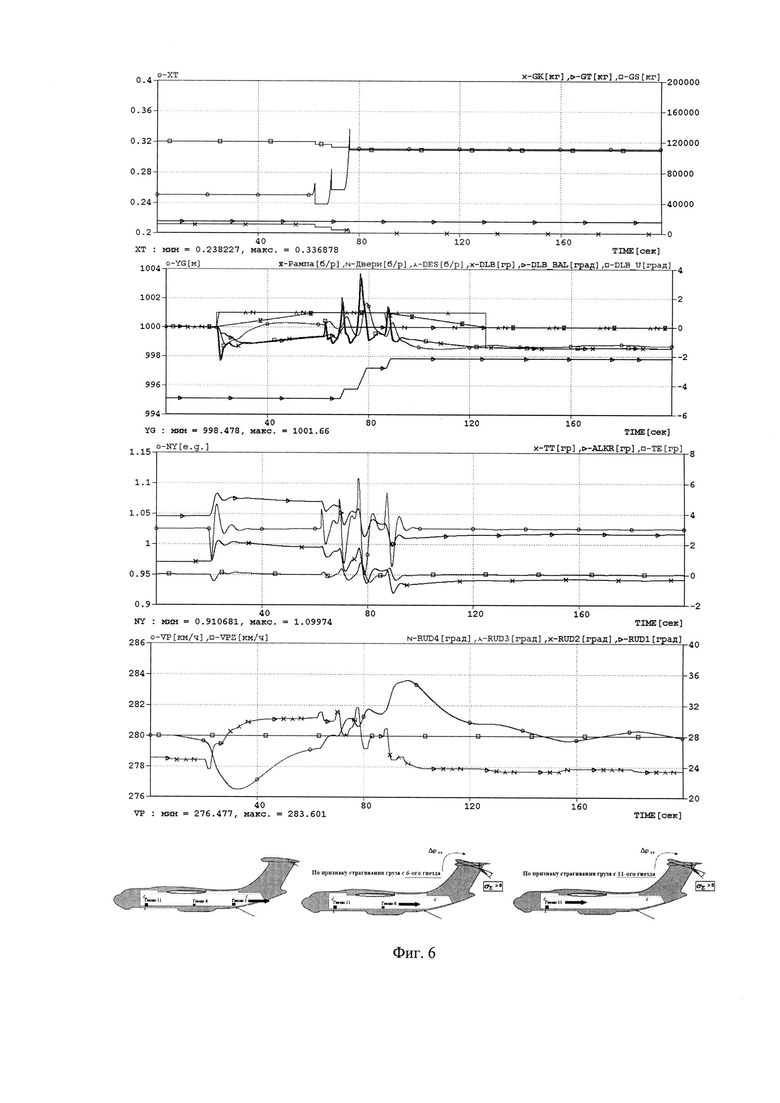
Результаты математического моделирования, применительно к самолету Ил-76-МД-90А приведены на Фиг. 3-10. Результаты получены при условии автоматического управления тягой двигателей.
На Фиг. 3 представлены результаты математического моделирования сброса груза весом 3700 кг с 1-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч. На стабилизатор формируется штатный сигнал автобалансировки, упреждающий сигнал по признаку страгивания груза с 1 - ого гнезда на стабилизатор не формируется.
На Фиг. 4 представлены результаты математического моделирования сброса груза весом 3700 кг с 6-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч. На стабилизатор формируется сигнал по признаку страгивания груза с 6-ого гнезда.
На Фиг. 5 представлены результаты математического моделирования сброса груза весом 3700 кг с 11-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч. На стабилизатор формируется сигнал по признаку страгивания груза с 11-ого гнезда.
На Фиг. 6 представлены результаты математического моделирования сброса серии грузов весом 3700 кг каждый с с 1-ого - 6-ого - 11-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч.
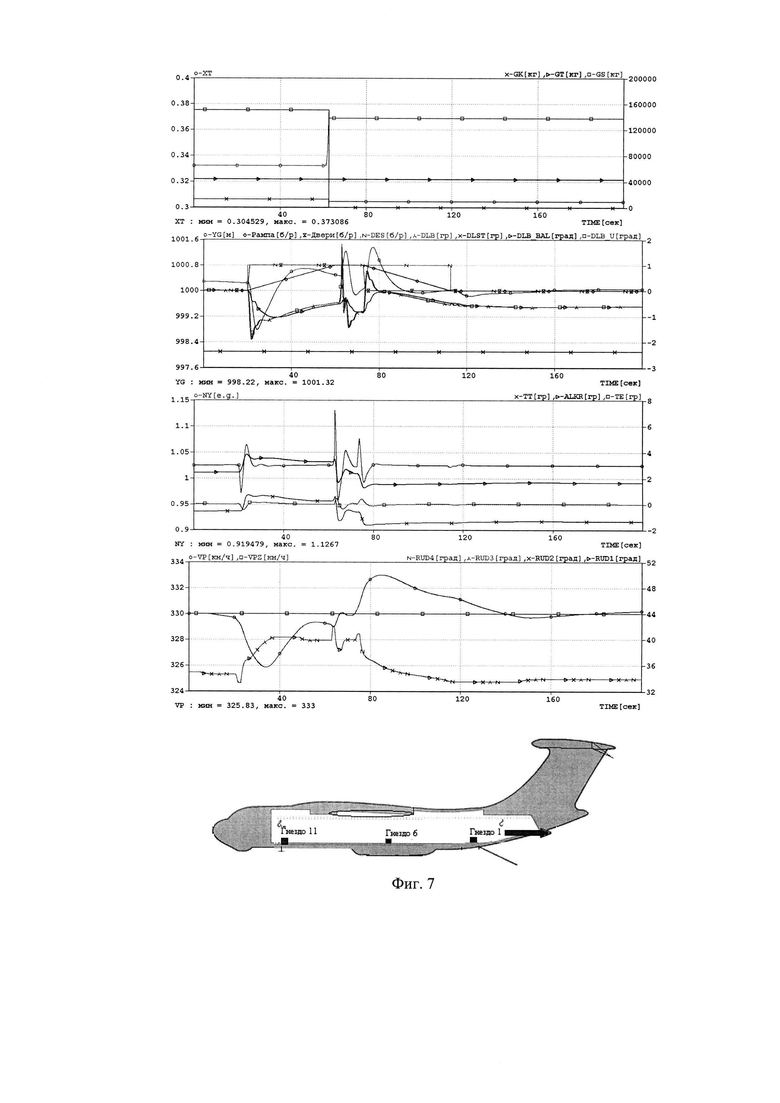
На Фиг. 7 представлены результаты математического моделирования сброса груза весом 12700 кг с 1-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч. На стабилизатор формируется штатный сигнал автобалансировки, упреждающий сигнал по признаку страгивания груза с 1 - ого гнезда на стабилизатор не формируется.
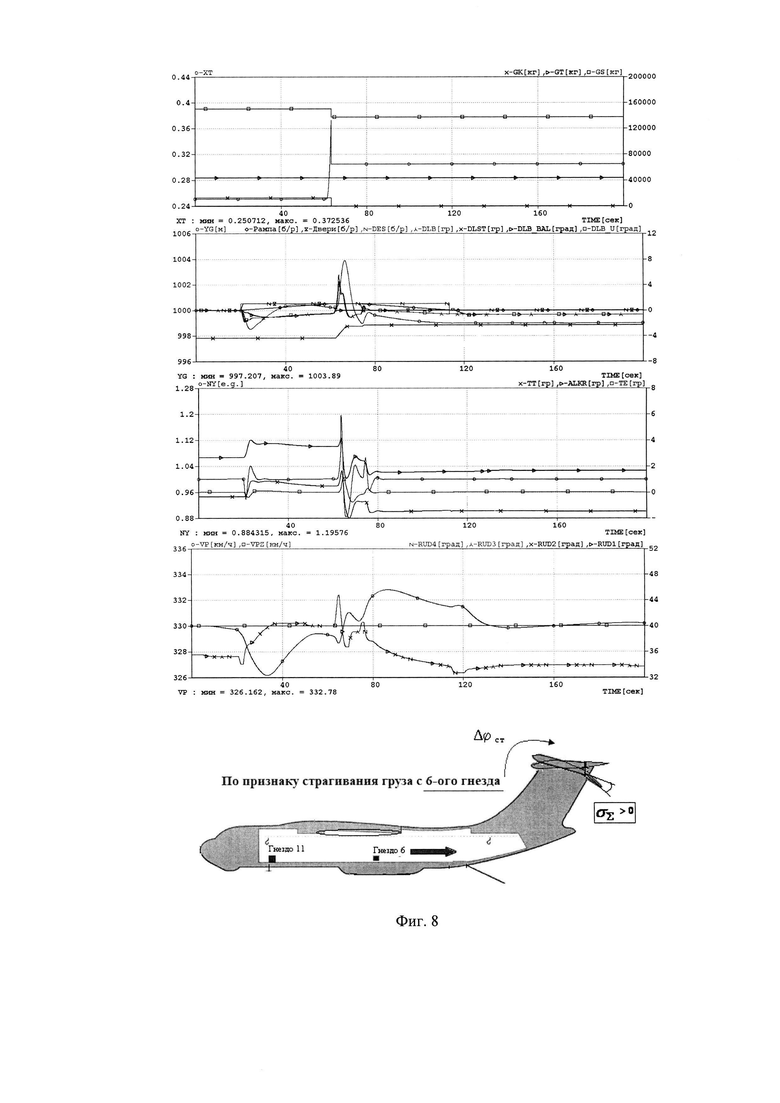
На Фиг. 8 представлены результаты математического моделирования сброса груза весом 12700 кг с 6-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч. На стабилизатор формируется сигнал по признаку страгивания груза с 6-ого гнезда.
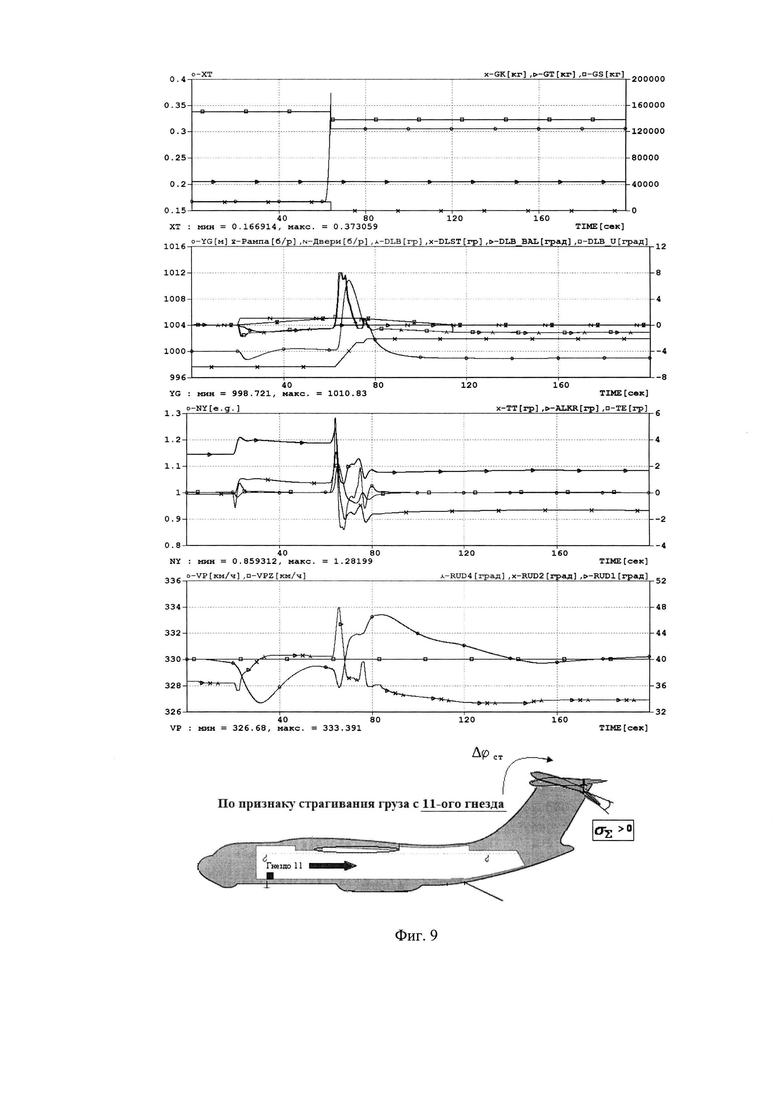
На Фиг. 9 представлены результаты математического моделирования сброса груза весом 12700 кг с 11-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч. На стабилизатор формируется сигнал по признаку страгивания груза с 11-ого гнезда.
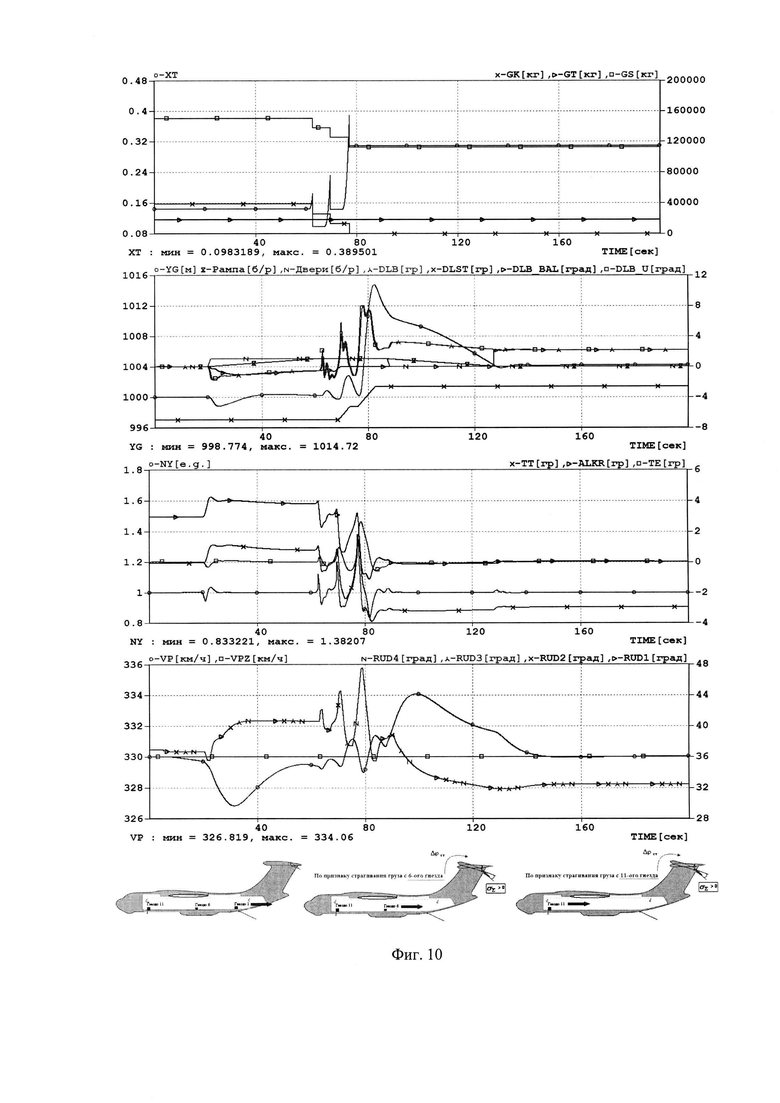
На Фиг. 10 представлены результаты математического моделирования сброса серии грузов весом 12700 кг каждый с 1-ого - 6-ого - 11-ого гнезда в штилевых условиях. δ3/ПР=30°/25°, G с-та=120 т, Vпр=280 км/ч.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПИЛОТИРОВАНИЯ САМОЛЕТА ПРИ ВОЗДУШНОМ ДЕСАНТИРОВАНИИ ГРУЗА | 1986 |
|
SU1840016A1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СПОСОБ И УСТРОЙСТВО ОГРАНИЧЕНИЯ УГЛА АТАКИ И ПЕРЕГРУЗКИ САМОЛЕТА | 2002 |
|
RU2248304C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2644842C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА И ОГРАНИЧЕНИЯ ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2560958C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА И ОГРАНИЧЕНИЯ УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434785C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА И ОГРАНИЧЕНИЯ УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2686378C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
Изобретение относится к способу управления самолетом для реализации автоматического парашютного десантирования тяжелых грузов. Для реализации способа в полете на установившемся режиме находят цель десантирования, выполняют противоперегрузочный маневр, выполняют страгивание груза и переводят вслед за этим самолет в установившийся режим полета, при этом управление осуществляют в автоматическом режиме определенным образом, используя данные о рассогласовании между заданными и текущими параметрами полета с датчиков барометрической высоты, угла наклона траектории, вертикальной скорости и угловой скорости, а также данные об изменении массы и балансировки самолета после страгивания груза. Обеспечивается повышение эффективности, качества и безопасности десантирования тяжелых грузов. 10 ил.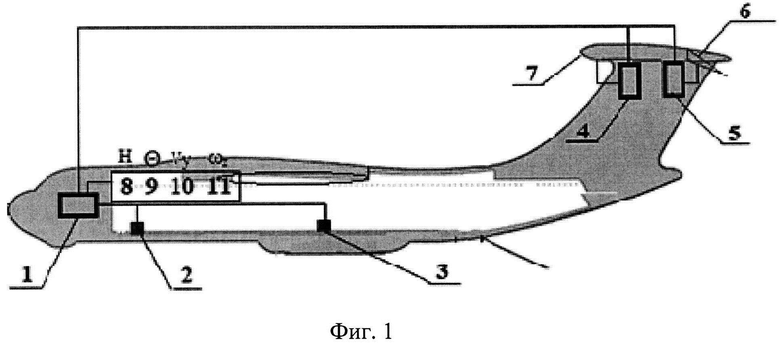
Способ управления самолетом для реализации автоматического парашютного десантирования тяжелых грузов, включающий полет на установившемся режиме, нахождение цели десантирования, выполнение противоперегрузочного маневра, страгивание груза и последующий за страгиванием груза перевод самолета в установившийся режим полета, при этом управление осуществляется в автоматическом режиме путем управляющего сигнала бортового вычислителя автопилота на рулевую машину автопилота для отклонения руля высоты и стабилизаторов в режиме стабилизации заданной высоты десантирования, отличающийся тем, что для формирования управляющего сигнала на руль высоты в вычислителе используются данные о рассогласовании между заданными и текущими параметрами полета с датчиков барометрической высоты, угла наклона траектории, вертикальной скорости и угловой скорости, а также данные об изменении массы и балансировки самолета после страгивания груза.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СИСТЕМА УПРАВЛЕНИЯ СБРОСОМ ГРУЗА ИЗ ГРУЗООТСЕКА САМОЛЕТА | 1990 |
|
RU1795626C |
| US 9014967 B2 (THE BOEING COMPANY), 21.04.2015 | |||
| РЕЗЕРВУАР ДЛЯ ЖИДКОСТИ, ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ УДАЛЕНИЯ ВОЗДУХА, ВОВЛЕЧЕННОГО В ЖИДКОСТЬ | 2011 |
|
RU2565120C2 |

