Известна система управления гидравлическим ковочным прессом, содержащая насос и цилиндр автоматического управления, снабженный переключающим на реверс устройством. Последнее соединено посредством кулачка с ведомым звеном дифференциального механизма.
Описываемая система отличается от известной тем, что переключающее па реверс устройство выполнено в виде трех последовательно установленных и гидравлически связанных между собой четырехходовых двухпозициопных золотниковых распределителей. Средний распределитель соединен с кулачком и служит датчиком состояния системы управления. Два других, являющихся взаимноуправляемыми, соединены один - с насосом, а другой - с цилиндром автоматического управления.
Такое выполнение системы улучщает ее эксплуатационные качества и повышает точность изготовления иоковок.
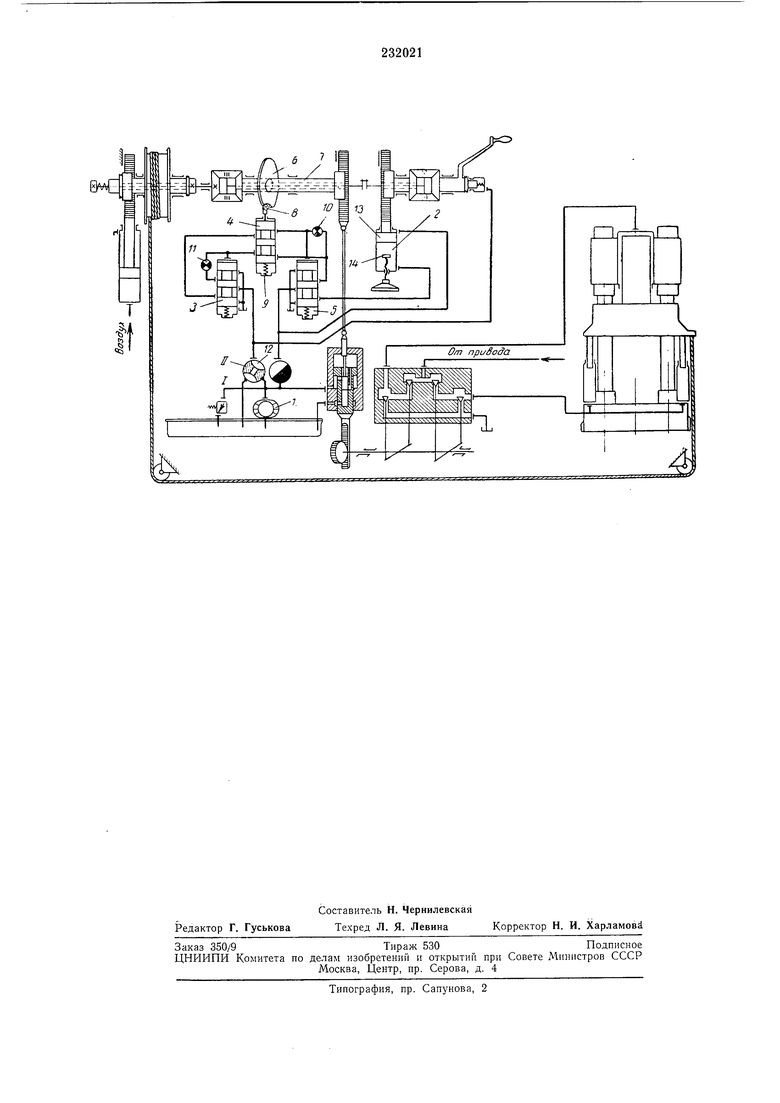
Принципиальная схема описываемой системы управления представлена на чертеже.
Система содержит насос 1, цилиндр 2 автоматического управления, снабженный переключающим на реверс устройством, выполненным в виде трех последовательно установленных и гидравлически связанных между собой четырехходовых двухпозиционных золотниковых распределителей 3, 4 и 5. Средний 4 соединен кулачком 6 с ведомым звеном 7 дифференциального механизма, служащего для суммирования команд ручного и автоматического
управления. Два других соединены один 3 с насосом, а другой 5 с цилиндром.
Кулачок 6 представляет собой диск со впадиной. Глубина впадины определяется необходимым ходом переключения четырехходового
распределителя (золотника) 4. Кулачок в исходном полол ении становится так, что ролик 8 золотника 4 попадает под действие пружины 9 этого золотника во впадину кулачка. Золотник 4 представляет собой последовательное соединение двух двухходовых золотников, один из которых нормально открытого, а другой нормально закрытого типа. В работе переключающего устройства золотник 4 является датчиком состояния системы управления и связующим звеном механической и гидравлической частями устройства. Он выполняет роль диспетчера для направления сигналов от распределителей (золотников) 3 и 5 к их управляющим торцам, а также роль
памяти состояния этих золотников в работе. Золотник 3 для уиравления золотником 5, а 3OviOTHHK 5 - для управления золотником 3 и цилиндром 2 системы. Золотники 5 и 5 - четырехходовые двухпогидравлически управляемым, а на второй воздействует пружина. Дроссели 10 и 11 осуществляют обратную связь внутри золотника при его работе. Эта связь необходима для компенсации влияния утечек на состояние золотника, когда его управляемая полость замкнута золотником 4. Работает система следующим образом. При установке ручного переключателя 12 в положение / от насоса к золотнику 3 подводится давлепие, которое через золотник 4 действует на управляющий торец золотника 5. Последний переключится и сообщит управляющую полость цилиндра 2 со сливом. Золотник 3 не изменит своего состояния, так как слив под его торцом будет поддерживаться через дроссель 11. Поршепь 13 цилиндра пойдет вниз до упора 14 и через кинематическую цепь иовернет кулачок 6, который в свою очередь переключит золотник 4 так, что перекроет питание управляющего торца золотника 5 и откроет питание к торцу золотница 3 от золотника 5. При этом золотник 5 не изменит своего состояния, так как давление под его торцом будет поддерживаться через дроссель 10, а золотник 5 изменит, так как его торец будет сообщен с напором от золотника 5. Цилиндр 2 не реверсируется. При отработке прессом заданного перемещения через обратную связь кулачок 6 поворачивается в обратную сторону, и при подходе кулачка к исходному положению ролик золотника 4 снова западает во впадину кулачка. Золотник 4 сообщит со сливом через золотник 3 управляющий торец золотника 5 и запрет управляющий торец золотпика 3. При этом золотник 3 не изменит своего состояния, так как напор под его торцом будет поддерживаться через дроссель 10, а золотник 5 изменит, так как через золотники 4 и 5 открыт доступ на слив из-под его управляющего торца. В результате этого золотник 5 сообщается с напором цилиндра 2, т. е. реверсируется по сигналу отработки прессом заданного им перемещения на ход вверх. Произведя реверс, цилиндр задаст движение на ход пресса вниз, повернет кулачок 6 из исходного положения в другую сторону. Золотник 4 опять запрет управляющий торец золотника 5 и сообщит с золотником 5 управляющий торец золотника 3. При этом золотник 5 не изменит свое состояние, так как слив под его управляющим торцом будет поддерживаться через дроссель 10, а золотник 3 изменит, и на выходе из него будет напор. Цилиндр 2 не реверсируется. Далее следует отработка прессом через обратную связь заданного перемещения на ход пресса вниз, поворот кулачка 6 в обратную сторону и установка его в исходное положение. При подходе к исходному положеПИЮ кулачок переключит золотник 4, напор от золотника 3 пройдет под управляющий торец золотника 5, а управляющий торец золотника 3 запрется. Схема получит такое состояние, которое она имела при установке ручного переключателя в положение /. Цикл переключений замкнется и начнет повторяться в описанной последовательности на четыре такта до тех пор, пока ручной переключатель не будет установлен в положение //. Предмет изобретения Система управления гидравлическим ковочным прессом, содержащая насос и цилиндр автоматического управления, снабженный переключающим на реверс устройством, соединенным посредством кулачка с ведомым звеном дифференциального механизма, отличающаяся тем, что, с целью улучшения ее эксплуатационных качеств и повыщения точности изготовления поковок, переключающее на реверс устройство выполнено в виде трех последовательно установленных и гидравлически связанных между собой четырехходовых двухпозиционных золотниковых распределителей, средний из которых соединен с кулачком и служит датчиком состояния системы управения, а два других, являющихся взаимноправляемыми, соединены один - с насосом, другой - с цилиндром автоматического управления.
ЕП х
| название | год | авторы | номер документа |
|---|---|---|---|
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| Система автоматического управления ковочным прессом | 1975 |
|
SU610678A1 |
| ПРИВОД ГИДРАВЛИЧЕСКОГО ПРЕССА | 1973 |
|
SU453327A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПРЕССОМ | 1998 |
|
RU2152309C1 |
| Станок для резки материалов | 1986 |
|
SU1425056A1 |
| Нагружающее устройство стенда для испытания передач на неустановившихся режимах работы | 1980 |
|
SU964520A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМПРЕССОМ | 1971 |
|
SU418351A1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1969 |
|
SU251366A1 |
| Система управления гидравлическимпРЕССОМ | 1977 |
|
SU812602A2 |