Изобретение относится к обработке металлов давлением и может быть использовано для автоматического управления ходами ползуна ковочного пресса с приводом от насосно-аккумуляторной станции.
Известна система гштоматического управления ковочным прессом, содержащая насос и цилиндр автоматического управления с переключающим на реверс устройством связанным посредством кулачка с ведомым звеном дифференциального механизма и выпол евным в виде трех последовательно установленных и гидравлически соединенных между собой четырехходовых двухпозадионных золотниковых распределителей, средний из которых соединен с кулачком, а два других соединены один с насосом, а другой с цилиндром автоматического управления lj. В такой системе информация о положении ползуна подается на переключающее устройство, а с переключающего устройства на золотник сервомотора выдаются соответст вутощие команды в виде перемещения тяг, связанных с золотником. Однако указанная система не обеспечивает оптимальных параметров перемещения золотника сервомотора, т.е. раздельной регулировки величины и скоростей открытия и закрытия напорных и сливных клапанов распределителя, что сннжает производительность н точность работы пресса и приводит к гиароударам в системе.
Известна такжесистема автоматического управления ковочным прессом, соцержашая клапанный распределитель, соединенный через сервомотор с рукояткой ручного ут1равления и рабочим цилиндром пресса, ова гидроусилителя, выполненных в виде цилиндров с приводными органами, контактирующими с рукояткой ручного управления, причем цилиндр одного гидроусилителя соединен с золотником каналами и рычагом обратной связи, взаимодействующим через рычанмую систему с кулачковым механизмом, связанным с ползуном пресса, и золотниковые распределители, соединенные с этим гидроусилителем; цилиндр другого гидроусилителя связан с аналогичными элементами . Эта система построена так, что один из гидро. усилителей производит только аакрытне на- порных клапанов,. перемещая золотник мотора из крайнего положения в положение Стоп, а другой - спчвнык. Недостаток си стемы заключается в ее сложности, а нали чие большого числа элементов, входящих в переключающее устройство, увеличивает су марное время их срабатывания за один цикл, что снижает быстродействие системы и число ходов пресса, Лля повышения быстродействия в при- BOQHOM органе и корпусе цилиндра другого гифоусилителя предлагаемой системы выполнены соответственно кольцевая проточка и осевое отверстие, соединенное с золотниковыми распределителями, а также сквозное радиальное отверстие, сообщающееся с одной стороны со сливом, а с дру гой стороны с золотником первого гидроусилителя, в штоковой полости которого выполнен дополнительный канал, связанный с напорной магистралью. На фиг. 1 схематично изображена описываемая система автоматического управления; на фиг. 2 и 3 - графики перемещения золотника сервомотора главного распределителя системы. Пресс 1 управляется от клапанного рас пределителя 2, коромысловый вал которого приводится в движение гидравлическим сервомотором 3. Золотник сервомотора свя зан с рукояткой 4 ручного управления тяга ми и перемешается синхронно с ними, т.е. золотник сервомотора и рукоятка ручного управления представляют собой одно целое и являются входным звеном сервомотора. Ползун, пресса кинематически (посредством цепи, натягиваемой грузом) связан с кулачковым механизмом 5 задачи размеров. Кулачок 6 в механизме 5 вращается синхронно с ползуном пресса и может быть повернут в требуемое положение, которое и определяет координату нижней точки реверса ползуна (или размер поковки). В ка- чеоггве такого механизма может быть использована, например, автоматическая система регулирования величины хода ползуна. С кулачком 6 контактирует толкатель 7, передающий движение от кулачка .рычагам 8 и 9 рычазсной системы. Ось рычага 8 может перемещаться в вертикальном направлении винтом 10. Переключающее устройство системы состоит из двух гидроусилителей 11 и 12, воадействуюи нх на рукоятку 4, золотниковых распределителей 13 и 14, обратных клапанов 15 и 16, регулируемых 17 и 18 и нерегулируемых 19 и 20 дросселей. Гидроусилитель 11 предназначен для приведения рукоятки 4 в положение Вниз при работе s автоматическом режиме. Он СОСТОИТ из корпуса и приводного органа 21 в виде плунжера. В корпусе выполнены сквозное радиальное отверстие Q, , сообщающееся с одной стороны со С5ливом, а с другой стороны с золотником 22 гидроусилителя 12, и осевое отверстие S , соединенное с ЗОЛОТНИКОВ1ГМИ распределителями 13 и 14. В плунжере 21 выполнена кольцевая проточка 6 . Взаимное расположение отверстия а и проточки Ь таково, что отверстие а сообщается со сливом в определенном положении плунжера 21, соответствующем положению Стоп рукоятки 4 или несколько нь доходя этого положения, что регулируется винтом 23, 1Ч1дроусилитель 12 предназначен для возвращения рукоятки 4 из положения Вниз в положение Стоп в полуавтоматическом режиме и из положения Вниз в положение Вверх в автоматическом режиме работы, Он состоит из притертого в корпусе поршня 24и золотника 22, соединенных рычагом 25обратной связи. В штоковой полости поршня 24 гидроусилителя выполнены дополнительный канал 2 , связанный с напорной , магистралью и через который постоянно подается масло, и отверстие Э , расположенное так, что поршень перекрывает его в положении,, соответствующем положению Стоп рукоятки 4, Отверстие В соединено с золотниковым распределителем 14. Золотниковый распределитель 13 предназначен для включения автоматического режима (на фиг. 1 изображено положение распределителя, соответствующее ручному режиму). Золотниковый распределитель 14 предназначен для В1слючения полуавтоматического режима, В автоматическом режиме он также должен быть включен. Обратные клапаны 15 и 16, регулируемые 17 .и 18 к нерегулируемые 19 и 20 дроссели в данной системе используются по общеизвестному назначению. Система работает след ющим образом. На фиг, 1 изображена схема работы в ручном режиме. Отверстие 8 гидроусилителя 11 через золотниковый распределитель 13 соединено со сливом, и пл нжер 21 не взаимодействует с рукояткой 4. Отверстия е и Ж гидроусилителя 12 соединены со сливом соответственно через золотниковый распределитель 14 и дроссель 17, обратный клапан 16 и золотниковый распределитель 13. Так как в штоковую полость через дополнительный канал 1 постоянно подводится под давлением масло, поршень 24 утогтен независимо от положения золотника 22, Рукоятка 4 находится в положении Ползун пресса неподвадсек.
При отклонении рукоятки 4 в положение Вниз открываются соответсггвующие клапаны распределителя 2, из возвратных цилиндров пресса I сливается, а в главный цилиндр подается жидкость. Ползун пресса перемещается вниз со скоростью, определяемой величиной открытия клапанов распределителя 2. По достижении ползуном пресса требуемой нижней точки рукоятку 4 переводят в положение Стоп. Клапаны закрываются, ползун останавливается. Далее рукоятку переводят в положение- Вверх, открываются другие клапаны и ползун перемещается вверх.
По достижении требуемого верхнего положения рукоятку ставят в положение Сто клапаны закрываются, ползун останавливается. Далее цикл повторяется,
В полуавтоматическом режиме пресс управляется рукояткой ручного управления так же, как и в ручном режиме. Для включения полуавтоматического режима необходимо переключить золотниковый распределитель 14. При этом масло подводится через дополнителшый канал L , отверстие 3 дроссель 2О и золотниковый распределител 14 к отверстию в , Кулачок 6 устанавливается в соотвеа ствующее положение, чтобы получить П50КНЫЙ размер поковки. Плунжер 21 в этом режиме остается утопленным и не взаимодействует с рукояткой 4, так как отверстие 6 соединено со сливом через золотниковый -распределитель 13, Оператор вручную отклоняет рукоятку 4 в положение Вверх, ползун пресса перемешается вверх, кулачок 6 вращается по часовой стрелке, причем его радиус не взаимодействует с толкателем 7 и не перемещает рычаги 8 и 9, Золотник 22 под действием пружины приподнят, и подпорщне вая полость гидроусилителя 12 соединена со сливом через отверстие К , дроссель 17, обратный клапан 16 и золотниковый распределитель 13, Значит во время хода вверх порщень 24 находится в нижнем положении и не взаимодействует с рукояткой 4,
Затем оператор переводит рукоятку 4 в положение Вниз, ползун пресса перемещася вниз, кулачок 6 вращается в обратную сторону.
При приближении ползуна к заданному размеру поковки кулачок 6 начинает смещать толкатель 7 вправо и поршень 24 начинает взаимодействовать с рукояткой4, потому что толкатель при своем перемещении поворачивает рычаг 8 против часовой стрелки, золотник 22 утапливается, отверстие е открывается и масло попадает под порщень, который приподнимается, перемещая щарнирно закрепленный на нем рычаг 25, блатодаря чему золотник 22 под дей- ствием пружины также приподнимается, рекрывая отверстие е , т,е. гидроусилитель 12 работает в режиме слежения и поршень 24 перемещается вверх на величину, строго пропорциональную углу поворота рычага
8против часовой стрелки. При. движении порщень 24 возвращает рукоятку 4, уста новленную оператором в положение Вниз, в направлении к положению Стоп , т.е, происходит затормаживание ползуна пресса.
Когда ползун пресса доходит до задянного нижнего размера, кулачок 6 перемещает толкатель 7, который повооачивает оычаг 9 ппотив часовой стрелки. Другой конец рычага
9при этом через рычаг 25 утапливает золотник 22, и масло беспрепятственно проходит под порщень 24, который быстро уже не в следящем режиме смещается вверх и стадит рукоятку 4 в положение Стоп, В этом положении порщень 24, перекрыв отверстие Э , закрывает доступ масла к о-гверстию е и прекращает, свое движение вверх.
Далее рукоятку 4 вручную переводят в положение Вверх, ползун перемешается вверх, кулачок 6 вращается в обратную сторону, рычаг 9, а затем и рычаг 8 освобождают золотник 22, он всплывает и подпорщ- невая полость беспрепятственно соединяется со сливом через отверстие Ж , обратный клапан 16 и золотниковый распределитель 1
Система приходит в исходное положение. Цикл может быть повторен.
Если затормаживать ползун не нiaдo при Достижении им нижней точки, когда сопротивление поковки достаточно велико, то, чтобы избежать ненужного „дросселирования в клапанах, опору рычага 8 поднимают на требуемую величину винтом Ю.
Таким образом, в полуавтоматическом режиме с рукояткой 4 взаимодействует только порщень 24 и только на участке, соответствующем приближению ползуна к за данному размеру, а само взаимодействие заключается в перемещении поршнем рукоятки из положения Вниз в положение Стоп
Для включения автоматического режима необходимо установить кулачок 6 в такое положение, чтобы получился требуемый размер поковки, и переключить золотниковы распределители 13 и 14 по сравнению с их положением, изображенным на фиг, 1,
В этом случае ползун совершает движение в автоматическом режиме.
Масло через золотниковый распределитель 13 подается в отверстие о под плунжер 21, который, воздействуя на рукоятку 4, переводит ее в положение Вни.в. Ползун пресса перемещается вниз, а кулачок 6 начинает вращаться прот1ш часовой стрелки. При приближении ползуна к заданной нитккей точке кулачок 6 через толкатель 7 и рычаги 8 и 9 утаплтшает золотник 22 и поршень 24 начинает поонкмать ся вверх, переводя рукоятку 4 из положения Вниз в направлении к положению Стоп, Так как плошадь поршня 2. больше плошади плунжера 21, то с подъе.ом поришя плунжер утапливается. После того, как поршень 24 приведет рукоятку 4 в положение Стоп, он перекрывает отверсти 3 и дальнейшее движение поршня вверх возможно благодаря подаче масла к отверстию б через золотниковый распределитель 13, регулируемый дроссель 18, обратный клапан 15, дроссель 20 и золотниковый распределитель 14. Таким образом, поршень 24 продолжает перемещаться вверх, но уже медленнее - со скоростью, определяемой настройкой дросселя 18, благодаря чему происходит безударная разгрузка прессе от давления. Поршень, перемещаясь вверх, переводит рукоятку 4 в положение Вверх, и ползун пресса перемещается вверх.
При движении ползуна пресса вверх кулачок 6 вращается в обратную сторону, золотник 22 под действием пружины поднимается вверх, перемещая рычаГ 25, а через него рычаги 8 и 9 и толкатель 7 в исходное положение. Полость под поршнем 24 соединяется с отверстием Ж и через дроссель 17со сливом. Обратный клапан 16 поджат давлением, и плунжер 21 изолирует отверстие слива. Благодаря этому поршень 24 (а значит, и рукоятка 4) переводится из положения Вверх в направлении к положению Стоп со скоростью, определяемой дросселем 17, Чем дольше рукоятка возвращается к положению Стоп тем больший ход соверц-ает ползун пресса. Этим и регулируется величина хода ползуна в автоматическом режиме.
Когда рукоятка приближается к положению Стоп, а ползун уменьшает скорость. (благодаря дросселированию в клапанах распределителя 2) до безопасной (чтобы произошла безударная остановка ползуна), отверстие а, в корпусе гифоусилителя 11 сообщается через кольцевую проточку Ь со сливом, поршень 24 быстро опускается вниз, а рукоятка бьютро минует положение Стоп и уходит в положение Вниз , Ползун опускается вниз, совершая очередной рабочий ход. Цикл повторяется.
Таким образом, в автоматическом режиме с рукояткой 4 одноврег енно зваимодействуют плунжер 21 и поритень 24, причем
скорость перемещения рукоятки определяется только скоростыо перемещения ПОРШНЯ, Скорость перемещения поршня регулируется дросселями,
В автоматическом режиме работы системы задеряска ползуна в верхнем положении отсутствует.
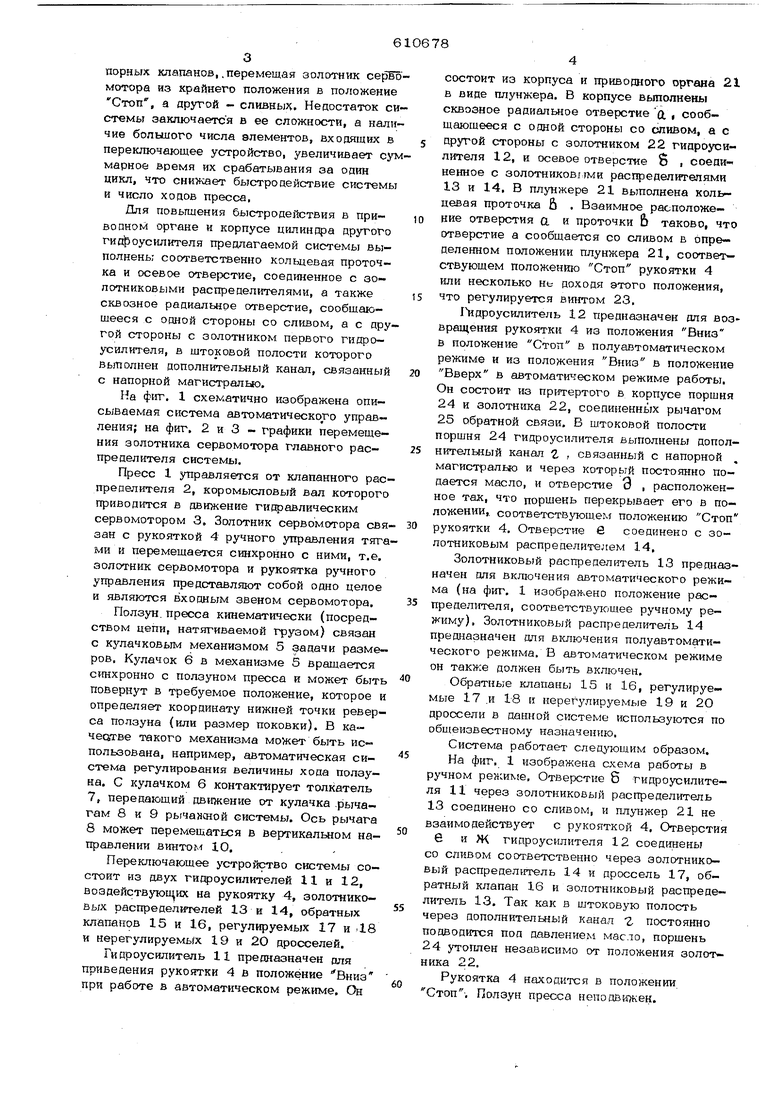
На фиг, 2 и 3 показаны графики перемещения золотника сервомотора или рукоятки ручного управления в автоматическом режиме, причем фиг, 2 иллюстрирует работу большими ходами, а фигг, 3 - малыми. По горизонтали откладывают время, а по вертикали - величину перемещения аоло-гаика сервомотора (или рукоятки 4), что равнозначно перемещению клапанов распределителя системы,
Ка участке О-А (см, фиг, 2) происходит открытие клапанов на ход ползуна вверх. Угол об определяет скорость перемещения рукоятки 4 и регулируется дросселем 18, Чем больше этот угол, тем быстрее откры- вактся клапаны, быстрее происходят разгрузка пресса от давления и разгон ползу- на, Ка участке А - Б ползун перемещается вверх. Угол наклона этого участка, а значит, и величина хода вверх регулируется дросселем 17. В точке Б ползун достигает безударной скорости, и проточка Ь плунжера соединяет отверстие Q..CO сливом, Координата точки Б регулируется винтом 3,
На участке В -В - Р рукоятка быстро переводится в положение Стоп и далее в положение Вниз, Скорость перемещения ее определяется дросселем 19 (постоянным). Ползун разгоняется вниз,
На участке Г - Д ползун перемещается вниз с максимальной скоростыо, совершается рабочий ход,
На участке Д - Е при приближении к заданному размеру рукоятка начинает возвращаться к положению Стоп. Происходит затормаживание ползуна, Форкга этого участка определяется профилем кулачка 6, Координата точки Б регулируется винтом 10.
На участке Е - Ж рукоятка быстро перемещается в положение Стоп, Скорость перемещения определяется постоянным дросселем 2О. Далее цикл повторяется,
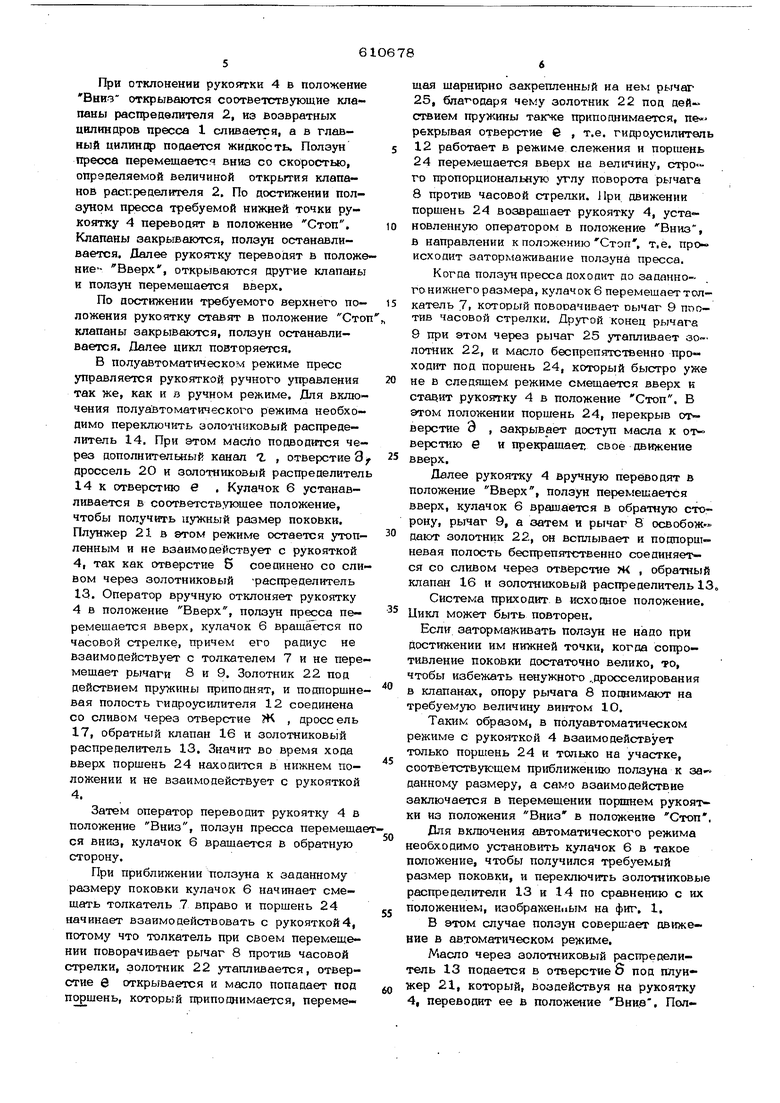
На графике работы малыми ходами системы (см. фиг, 3) отсутствуют горизонтальный участок, т.г задержка ползуна в верхнем положении, а также изломы линий, что приводит к плавному перемещег нию рукоятки с постоянной скоростыо в ее рабочем диапазоне. Благодаря этому на малой величине хода достигается болылое число ходов при спокойной безударной работе пресса. обретения р м у л а Система автоматического управления ковочным прессом, содержашая клапанный распрецелитель, соециненный через сервомотор с рукояткой ручного управления и рабочим цилиндром пресса, два гидроусилителя, выполненных в виде цилиндров с приводными органами, контактирующими с рукояткой ручного управления, причем цилинс одного гидроусилителя соединен с золотником каналами и рычагом обратной связи, взаимодействующим через рычажную систему с кулачковым механизмом, связанным с ползуном пресса, и золотниковые распределители, соединенные с этим гидроусилителем, отличающаяся тем, что. 6 с целью повышения быстродействия, в приводном органе и корпусе цилиндра другого гидроусилителя выполнены соответственнс кольцевая проточка и осевое отверстие, соединенное с золотниковыми распределителями, а также сквозное радиачьное отверстие, сообщающееся с одной стороны со сливом, а с другой стороны с золотником первого гидроусилителя, в uJтoкoвoй полости которого выполнен дополнительный канал, связанный с напорной магистралью. Источники информации, принятые во внимание при экспертизе: 1,Авторское свидетельство СССР № 232021, кл. В 30 В 15/26, 1967. 2.Авторское свидетельство СССР № 275741, кл. В 30 В 15/28, 1968.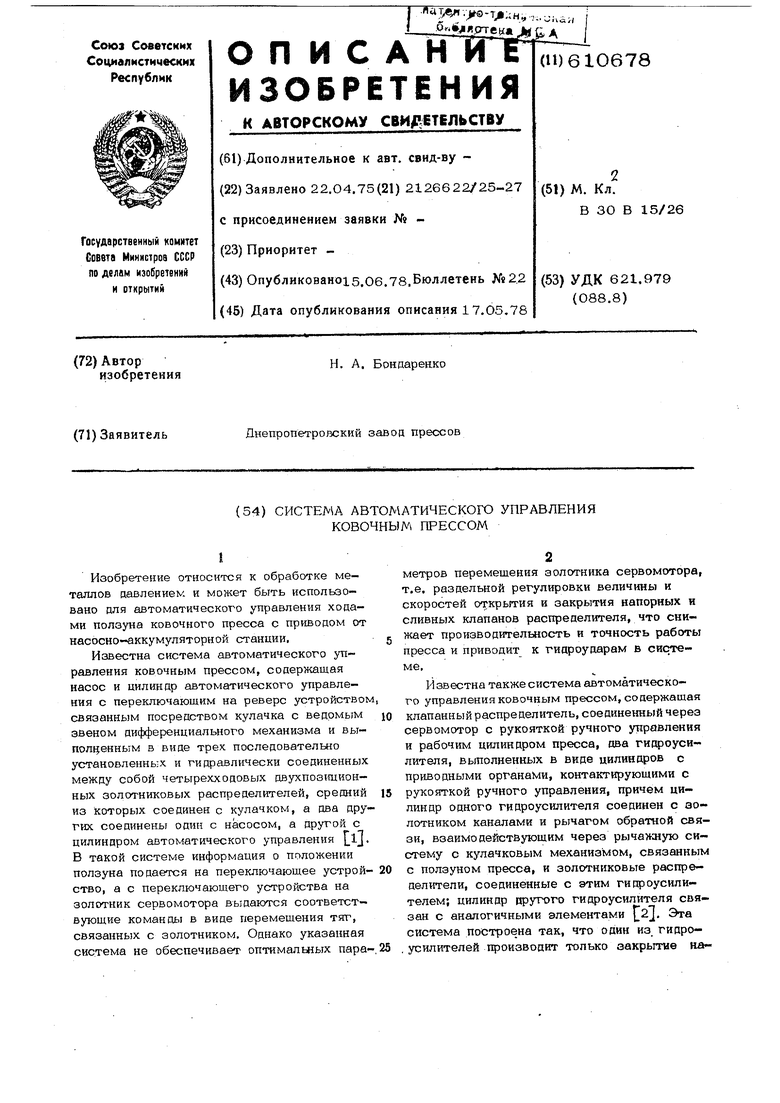


| название | год | авторы | номер документа |
|---|---|---|---|
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| Устройство для управления парогидравлическим ковочным прессом | 1936 |
|
SU49840A1 |
| Силовой цилиндр | 1982 |
|
SU1110949A1 |
| Регулятор скорости непрямого действия для двигателя | 1971 |
|
SU507703A1 |
| Система управления гидровинтовым прессом | 1972 |
|
SU564451A1 |
| Система автоматического управления гидравлическим прессом | 1974 |
|
SU720901A1 |
| Система управления главным распределителем гидравлического пресса | 1986 |
|
SU1411159A1 |
| Устройство управления ковочным прессом | 1982 |
|
SU1165600A1 |
| Золотниковый распределитель электрогидравлического пресса | 1980 |
|
SU994304A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1979 |
|
SU887333A1 |

. СЬ (,топ а....,
- t;
s, , - Л , .-..- V61O678
f«i/.J
