Известен микроманипулятор, состоящий из шарнирно установленной на стойке рукоятки управления, объемной гидравлической передачи, выполненной на мембранах, и стола, подвижно установленного на плоскости. В этом микроманнпуляторе движение от исполнительных элементов объемной гидравлической передачи к столу передается благодаря их жесткому креплению.
Предложенный микроманипулятор отличается от известных тем, что он снабжен каретками, соединенными с исполнительными элементами объемной гидравлической передачи, которая выполнена на сильфонах. Каретки снабжены роликами, которые взаимодействуют с плоскопараллельными планками, закрепленными на столе. Ролики каретки, находящиеся с одной стороны планки, выполнены подпружиненными.
Такое выполнение микроманипулятора повышает точность его работы.
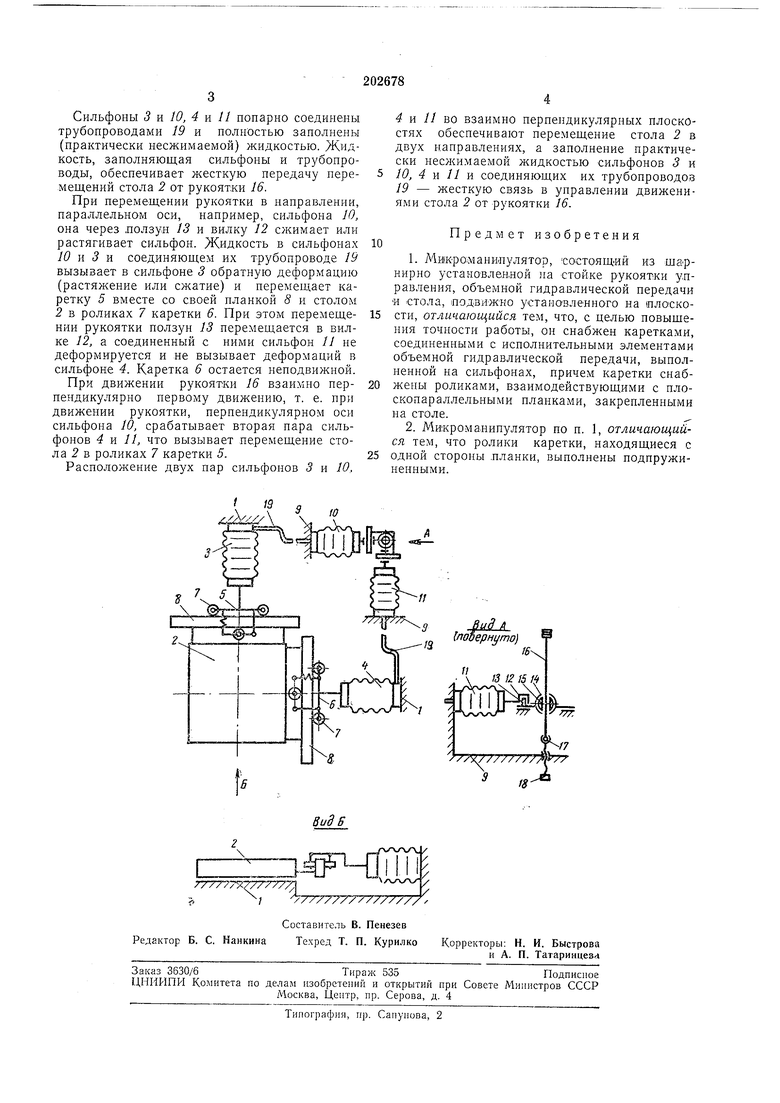
На чертеже показана конструктивная схема микромалипулятора.
Механизм перемещения микроманипулятора содержит основание /, по которому перемещается стол 2. К основанию одной стороной закреплены во взаимно перпендикулярных плоскостях два сильфона 5 и 4. Другой стороной сильфоны 5 и 4 связаны с каретками 5 и 6, ролЕки 7 которых охватывают плоскопараллельные планки S. Последние установлены на столе 2 взаимно перпендикулярно. При работе на микроманипуляторе такое расположение планок позволяет одной из кареток, например каретке 5, перемещаться в плоскости, перпендикулярной своей планке 8, вместе со столом. При этом вторая каретка (б) остается неподвижной.
Планки 8 служат направляющими для стола 2. Ролики 7 с одной стороны планок 8
подпружинены, поэтому у каждой планки в
качестве направляющей используется только
одна сторона.
Механизм управления микроманипулятора
состоит из основания 9, к которому одной стороной взаимно перпендикулярно закреплены два сильфона 10 и //. Второй стороной сильфоны 10 и 11 через вилку 12, ползун 13, рамку 14 и кулису 15, имеющую шаровую
поверхность, соединены с рукояткой 16. Рукоятка укреплена на основании 9 при помощи щарового щарнира 17, который закреплен в основании подвижно и может перемещаться от винта 18. Это позволяет изменять соотно
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТАКТНОЙ ШОВНОЙ СВАРКИ СИЛЬФОНОВ | 1995 |
|
RU2087284C1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| ШЛИФОВАЛЬНО-ОБДИРОЧНЫЙ СТАНОК | 1964 |
|
SU222895A1 |
| Автомат изготовления электрических катушек | 1987 |
|
SU1573478A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Микроманипулятор для микрохирургии | 1984 |
|
SU1238016A1 |
| Устройство для изготовления объемных текстильных изделий | 1977 |
|
SU737521A1 |
| Устройство для разгрузки, перемещения и укладки штучных изделий | 1989 |
|
SU1631004A1 |
| Самоходный ракетный комплекс | 2016 |
|
RU2620629C1 |
