Известны многоковшовые траншейные экскаваторы, рабочий орган которых, управляемый гидроприводом, шарнирно прикреплен к раме экскаватора и опирается на перемеш,аемую по дну траншеи лыжу.
В этих экскаваторах усилие заглубления зависит от веса рабочего органа, положение рабочего органа - от положения экскаватора при его движении по неровной местности и, кроме того, рабочий орган не обеспечивает принудительного давления на грунт.
Предлагаемый экскаватор отличается тем, что, с целью обеспечения принудительного давления рабочего органа на грунт и заданного его положения независимо от положения экскаватора при движении по неровной местности, рама рабочего органа соединена с рамой экскаватора боковыми гидроцилиндрами, заглубляющими рабочий орган, а его выглубление осуществляется гидроцилиндром, которым он опирается на лыжу. Распределитель гидропривода соединен с входящим в него насосом, баком и через клапаны - с рабочими гидроцилиндрами таким образом, что обеспечивает подачу рабочей среды в верхние полости боковых цилиндров при одновременном сливе ее в бак из нижней полости цилиндралыжи при заглублении рабочего органа или наоборот - подачу рабочей среды в нижнюю полость цилиндра-лыжи и одновременный
слив ее в бак из верхних полостей боковых цилиндров при его выглублении.
Глубиной копания обычно автоматически управляют электрогидравлические системы, датчики которых связаны с копиром (тросом, лучом и др.), а исполнительные органы поднимают и опускают рабочее оборудование экскаватора в соответствии с командами датчика.
Способ управления глубиной копания исключает зависимость усилия заглубления от веса рабочего органа. Для заглубления используется вес всего экскаватора, т. е. применяется принудительное давление на грунт. При этом положение рабочего органа не зависит от колебаний экскаватора при передвижении по неровной местности, что позволяет получать заданный профиль дна траншеи.
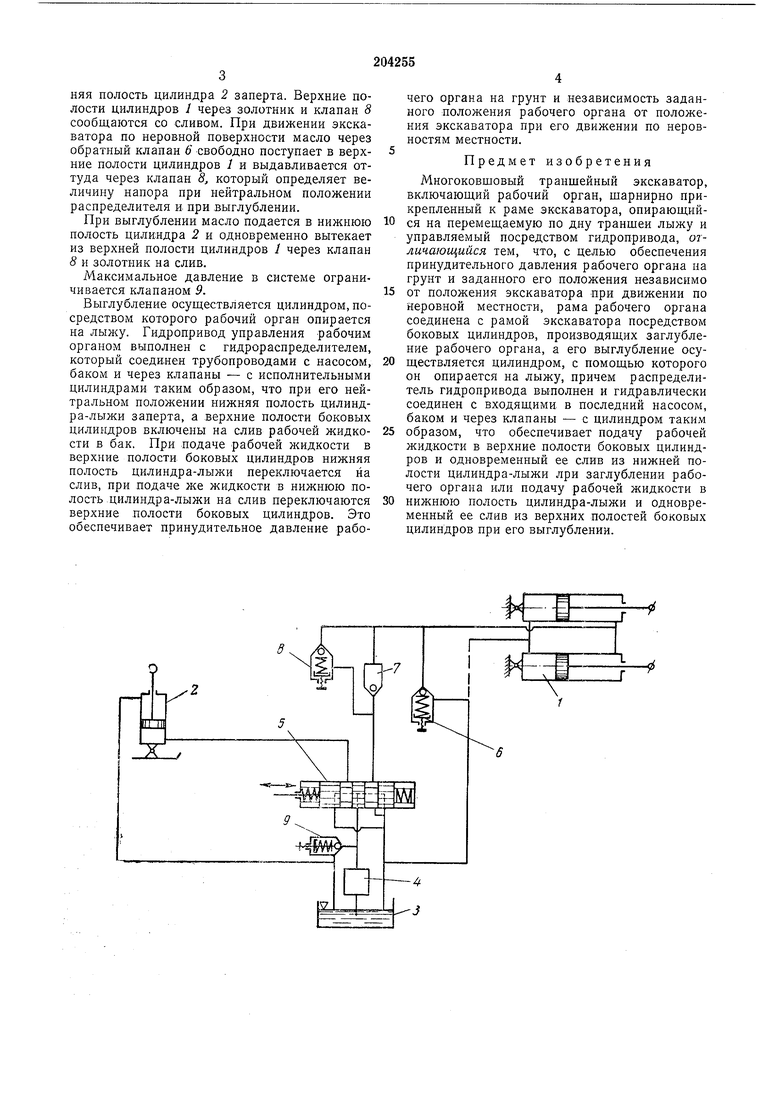
На чертеже изобрал ена гидравлическая схема предлагаемого экскаватора.
Во время работы нижние полости боковых цилиндров 1 и верхняя полость цилиндра 2 включены на слив. При заглублении масло из бака 3 подается .насосом 4 через распределительный золотник 5 и обратный клапан 6 в верхние полости цилиндров /. В то же время, нижняя полость цилиндра 2 переключается золотником на слив. Величина напора определяется клапаном 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления для землеройной машины | 1975 |
|
SU620559A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| ГИДРОПРИВОД одноковшового ЭКСКАВАТОРА | 1968 |
|
SU231395A1 |
| БУЛЬДОЗЕР ДВУСТОРОННЕГО ДЕЙСТВИЯ | 1969 |
|
SU247122A1 |
| Гидропривод машины для рытья траншей | 1979 |
|
SU878873A1 |
| Землеройная машина | 1979 |
|
SU861510A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД РАБОЧЕГО ОБОРУДОВАНИЯ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1965 |
|
SU172253A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1964 |
|
SU165407A1 |
