Известные способы механической или электрической юстировки магниточувствительного блока трехкомпонентного магнитометра путем смещения магнитной оси датчика в двух взаимно перпендикулярных направлениях, так как ПЛОСКОСТЬ угла несоосности магнитной и геометрической осей, как правило, неизвестна, требуют сложной кинематической (шести микрометрических приспособлений) или электрической (введение шести цепей связи по постоянному току) схемы магниточувствительпого блока.
Предлагаемый способ отличается от известных тем, что олределяют плоскость угла между магнитной и геометрической осями каждого датчика в отдельности, упомянутые плоскости трех датчиков совмещают с тремя плоскостями, образованными осями координат блока, и В этих же плоскостях механически или электрически смещают магнитные оси упомянутых датчиков.
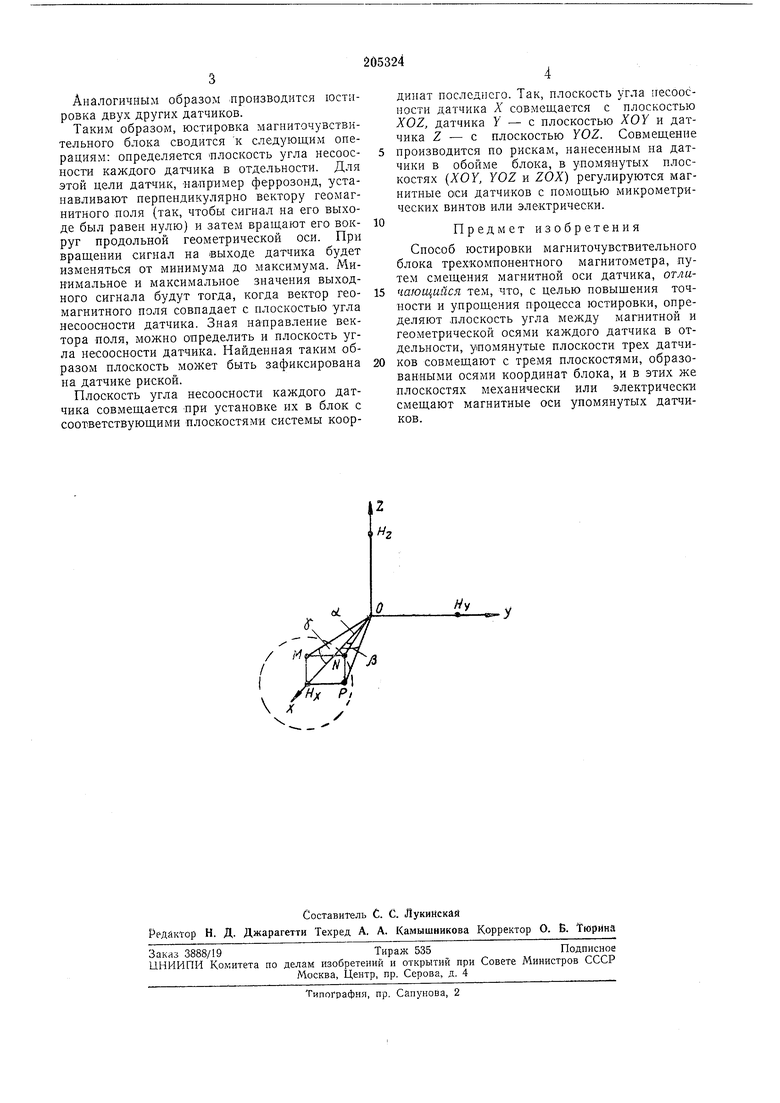
На чертеже изображена система координат X, Y к Z магниточувствительного блока, по осям которых необходимо выставить магнитные оси датчиков.
Hjf, Ну и HZ- проекции вектора внещнего магнитного поля на соответствующие оси. Пусть датчик, измеряющий составляющую Ях не совпадает с осью X, а занимает такое положение, когда его магнитная ось направлена
по линии ОЛ. В этом случае на датчик действует составляющая
hx Нх + Нх cos а 4- Як sin 3 -f + HZ sin-;,(1)
где a - угол между осью X и направлением ON;
Р - угол между осью X и направлением ОР (ОР-лежит в плоскости XOY);
Y - угол между осью X и направлением
ОМ (ОМ-лежит в плоскости OZ).
Пз выражения (1) с учетом малости углов
а, р и Y (например, для феррозондов эти углы
не превышают 1°) имеем АЯ Якр-|-Яг-(. (2)
Т. е. помеха, возникающая из-за несоосности магнитной и геометрической осей датчика, обусловлена главным образом действием составляющих поля Ну и HZ. Если плоскость угла несоосности заранее известна, то путем
вращения точки Л вокруг конца вектора Нх можно совместить эти плоскости, например, с плоскостью XOZ. Очевидно, что в этом случае Р 0 и у а. Тогда, в соответствии с выражением (2) получим АЯх Hza (3). Отсюда
следует, что для устранения погрешности ДЯх достаточно устремить к нулю сам угол а (механическая юстировка датчика в одной плоскости), либо с канала, измеряющего состаВляющую Hz , завести сигнал поправки в
Аналогичным образом производится юстировка двух других датчиков.
Таким образом, юстировка магниточувствительного блока сводится к следующим операциям: определяется плоскость угла несоосности каждого датчика в отдельности. Для этой цели датчик, «апример феррозонд, устанавливают перпендикулярно вектору геомагнитного поля {так, чтобы сигнал на его выходе был равен нулю) и затем вращают его вокруг продольной геометрической оси. При вращении сигнал на выходе датчика будет изменяться от минимума до максимума. Минимальное и максимальное значения выходного сигнала будут тогда, когда вектор геомагнитного поля совпадает с плоскостью угла иесоосности датчика. Зная направление вектора поля, можно определить и плоскость угла несоосности датчика. Найденная таким образом плоскость может быть зафиксирована на датчике риской.
Плоскость угла несоосности каждого датчика совмещается при установке их в блок с соответствующими плоскостями системы координат последнего. Так, плоскость угла аесоосиости датчика А совмещается с плоскостью XOZ, датчика У - с плоскостью ХОУ и датчика Z - с плоскостью yOZ. Совмещение производится по рискам, нанесенным на датчики в обойме блока, в упомянутых плоскостях (JOy, yOZ и ZOX) регулируются магнитные оси датчиков с помощью микрометрических винтов или электрически.
Предмет изобретения
Способ юстировки магниточувствительного блока трехкомпонентного магнитометра, путем смещения магнитной оси датчика, отличающийся тем, что, с целью повышения точности и упрощения процесса юстировки, определяют плоскость угла между магнитной и геометрической осями каждого датчика в отдельности, упомянутые плоскости трех датчиков совмещают с тремя плоскостями, образованными осями координат блока, и в этих же плоскостях механически или электрически смещают магнитные оси упомянутых датчиков.
(Г
.у
