Изобретение относится к области геофизики и может быть использовано для проведения калибровочных операций инклинометрических систем с трехкомпонентными феррозондовыми и акселерометрическими датчиками. Для выполнения калибровки инклинометрических систем осуществляют последовательное задание 6 определенных пространственных положений корпуса скважинного прибора инклинометрическиой системы и вычисляют значения малых угловых параметров отклонения осей чувствительности трехкомпонентных феррозондовых и акселерометрических датчиков инклинометрических систем от ортогональных осей с использованием обобщенных математических моделей.
Известен способ калибровки трехкомпонентного магнитометра (патент РФ 2497139, G01R 33/00, опубл. 27.10.2013), заключающийся в калибровке трехкомпонентного магнитометра с помощью меры магнитной индукции через определение корректирующей матрицы и уходов нулей магнитометра с исключением влияния внешних неоднородных (индустриальных) помех в процессе калибровки.
Недостатком такого способа является отсутствие определения малых угловых параметров отклонения осей чувствительности трехкомпонентного магнитометра инклинометрических систем от ортогональных осей.
Также известен способ автоматизированной калибровки электронных измерительных устройств (патент РФ 2310880, G01R 35/00, опубл. 20.11.2007), заключающийся в осуществлении автоматического анализа погрешности электронного измерительного устройства и преобразовании ее в калибровочный код, который передается в измерительное устройство для калибровки погрешности. При этом осуществляется последовательное формирование импульса тока для удаления перемычек регулировочного поля (запись калибровочного кода посредством удаления проводников) на плате.
Недостатком такого способа также является отсутствие определения малых угловых параметров отклонения осей чувствительности трехкомпонентных феррозондовых и акселерометрических датчиков инклинометрических систем от ортогональных осей.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является способ определения углов отклонения магниточувствительных осей феррозондов трехкомпонентного магнитометра от его собственных геометрических осей ортогонального базиса (Афанасьев Ю.В., Студенцов Н.В., Щелкин А.П. Магнитометрические преобразователи, приборы, установки. - Л.: Энергия, 1972. С. 247-250), заключающийся в определении шести углов непосредственно в геомагнитном поле на главных магнитных курсах 0, 90°, 180° и 270° путем последовательных поворотов блока феррозондов, например, вокруг вертикальной оси, для этого магниточувствительный блок магнитометра устанавливают на поворотном столе так, что продольная ось одного из преобразователей оказывается совмещенной с вертикалью, а продольные оси двух других преобразователей лежащими в горизонтальной плоскости, после разворота блока вокруг вертикальной оси с наблюдением показаний на главных курсах искомые углы вычисляют в виде функций результатов преобразований и угла магнитного наклонения.
Недостатком такого способа является невозможность его использования для калибровки инклинометрических систем в целом и невысокая точность.
Таким образом, анализ известных способов калибровки инклинометрических систем выявил, что все они обладают серьезными недостатками, а именно: их применение на практике не обеспечивает получение высокой точности измерений при проведении процедуры калибровки инклинометрических систем.
Задача изобретения - повышение точностных показателей инклинометрических систем при проведении их калибровки посредством определения малых угловых параметров отклонения осей чувствительности трехкомпонентных феррозондовых и акселерометрических датчиков инклинометрических систем от ортогональных осей.
Технический результат - уменьшение погрешности измерений инклинометрических систем за счет определения малых угловых параметров отклонения осей чувствительности трехкомпонентных феррозондовых и акселерометрических датчиков инклинометрических систем от ортогональных осей и их учета при дальнейшей обработке результатов измерений.
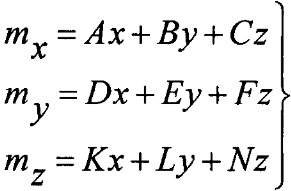
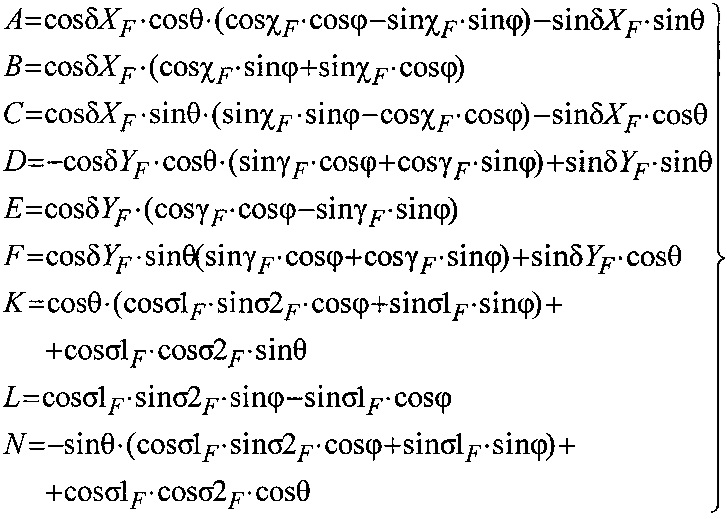
Поставленная задача решается, а технический результат достигается тем, что в способе определения углов отклонения магниточувствительных осей феррозондов трехкомпонентного магнитометра от его собственных геометрических осей ортогонального базиса определяют шесть углов непосредственно в геомагнитном поле на главном магнитном курсе 0° путем последовательных поворотов блока феррозондов вокруг горизонтальной оси, для этого магниточувствительный блок магнитометра устанавливают на поворотном столе так, что продольная ось одного из преобразователей оказывается совмещенной с вертикалью, а продольные оси двух других преобразователей оказываются лежащими в горизонтальной плоскости, искомые углы вычисляют в виде функций результатов преобразований, согласно изобретению а также определяют углы отклонения гравичувствительных осей трехкомпонентного акселерометрического преобразователя от его собственных геометрических осей ортогонального базиса за счет выполнения операций, когда последовательно на поворотном столе задают шесть пространственных положений корпуса скважинного прибора инклинометрической системы с трехкомпонентными акселерометрическими и феррозондовыми датчиками, характеризующихся визирным углом ϕ, зенитным углом θ и азимутальным углом α=0°: задают зенитный угол θ=0° и визирный угол ϕ=0°, измеряют и заносят в массив значения сигналов с гравичувствительных осей gx1, gy1 и gz1 с акселерометров Ax, Аy и Az, сигналов с магниточувствительных осей mх1, my1 и mz1 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=0° и визирный угол ϕ=180°, измеряют и заносят в массив значения сигналов gx2, gy2 и gz2 с акселерометров Ax, Аy и Az, сигналов mх2, my2 и mz2 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=0°, измеряют и заносят в массив значения сигналов gx3, gy3 и gz3 с акселерометров Ах, Аy и Az, сигналов mx3, my3 и mz3 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=90°, измеряют и заносят в массив значения сигналов gx4, gy4 и gz4 с акселерометров Аx, Аy и Az, сигналов mх4, my4 и mz4 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=180°, измеряют и заносят в массив значения сигналов gx5, gy5 и gz5 с акселерометров Аx, Аy и Az, сигналов mх5, my5 и mz5 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=270°, измеряют и заносят в массив значения сигналов gx6, gy6 и gz6 с акселерометров Ах, Аy и Az, сигналов mх6, my6 и mz6 с феррозондов Fx, Fy и Fz, и вычисляют значения малых угловых параметров с использованием обобщенных математических моделей для трехкомпонентного акселерометрического датчика:
 ,
,
где gx, gy и gz - приведенные значения сигналов с акселерометров соответственно Ах, Аy и Аz, и трехкомпонентного феррозондового датчика:
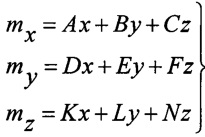
 ,
,
где 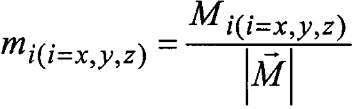 - приведенные значения измеряемых проекций вектора напряженности геомагнитного поля
- приведенные значения измеряемых проекций вектора напряженности геомагнитного поля  ,
,
 ,
,
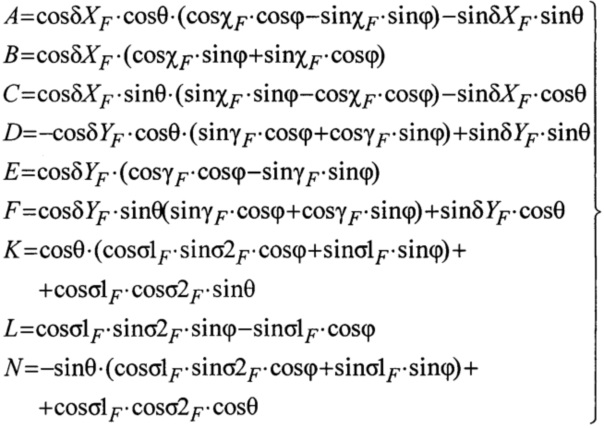
по измеренным значениям сигналов gx1 и gy1 с акселерометров Аx и Аy вычисляют значения малых угловых параметров δXA и δYA:
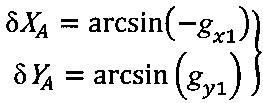 ,
,
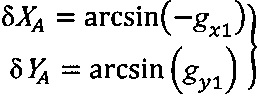
по измеренному значению сигнала gz5 с акселерометра Az вычисляют значение малого углового параметра σ2A:
σ2A=arcsin(gz5),
по измеренным значениям сигналов gx4 и gx5 с акселерометра Ax вычисляют значение малого углового параметра χA:
 ,
,
по измеренным значениям сигналов gz1 и gz6 с акселерометра Az вычисляют значение малого углового параметра σ1A:
 ,
,
по измеренным значениям сигналов mx3, mx4, mх5 и mх6 с феррозонда Fx вычисляют значение малого углового параметра χF:
 ,
,
по измеренным значениям сигналов my3, my4, my5 и my6 с феррозонда Fy вычисляют значение малого углового параметра γF:
 ,
,
по измеренным значениям сигналов mz1, mz2, mz4 и mz6 с феррозонда Fz вычисляют значение малого углового параметра σ2F:
 ,
,
по измеренным значениям сигналов mz1, mz2, mz3 и mz5 с феррозонда Fz и определенному значению параметра σ2F вычисляют значение малого углового параметра σ1F:
 ,
,
по измеренным значениям сигналов mx1, mх2, mx4 и mx6 с феррозонда Fx и определенному значению параметра χF вычисляют значение малого углового параметра δXF:
 ,
,
по измеренным значениям сигналов my1, my2, my4 и my6 в с феррозонда Fy и определенному значению параметра γF вычисляют значение малого углового параметра δYF:
 .
.
Полученные значения малых угловых параметров заносят в электронный паспорт инклинометрической системы и используют при обработке результатов измерений инклинометрической информации, что позволяет повысить точность определения углов пространственной ориентации - визирного угла ϕ и зенитного угла θ.
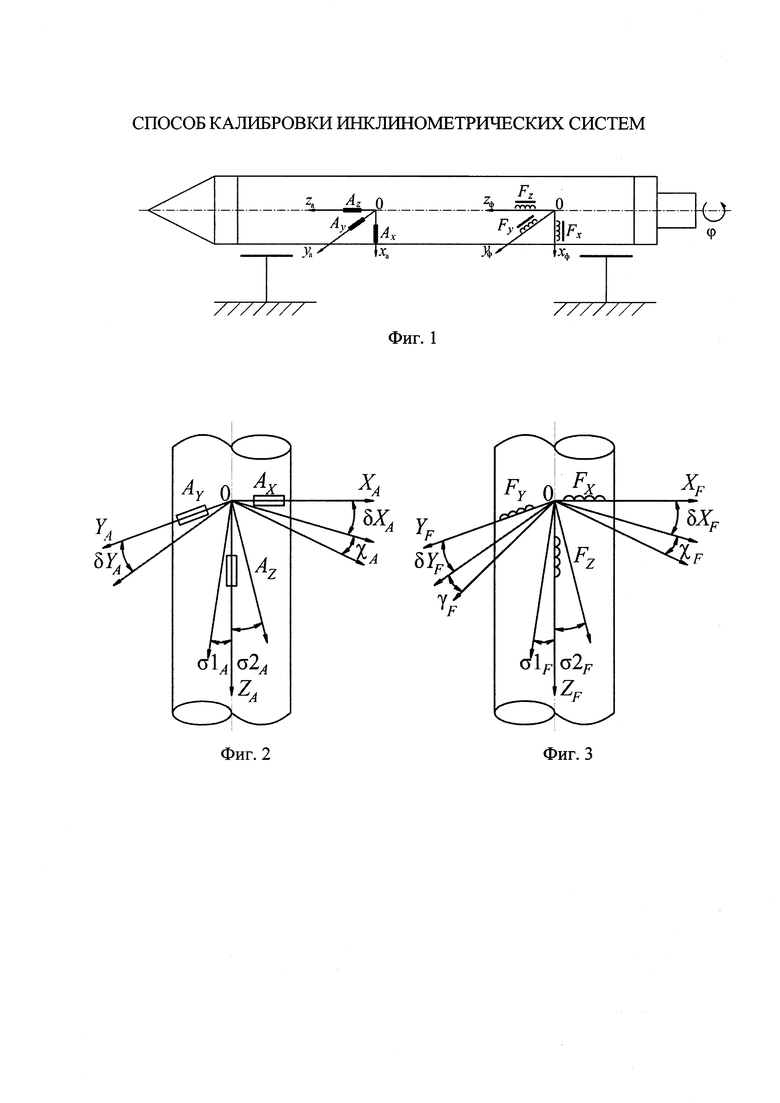
Сущность изобретения поясняется чертежами. На фиг. 1 изображен скважинный прибор инклинометрической системы, поворачиваемый по визирному углу ϕ и азимутальному углу α, наклоняемый на зенитный угол 9 с использованием поверочной установки для инклинометрических систем. На фиг. 2 изображен трехкомпонентный акселерометрический датчик, установленный в корпусе скважинного прибора инклинометрической системы, а также его малые угловые параметры, значения которых определяют. На фиг. 3 изображен трехкомпонентный феррозондовый датчик, установленный в корпусе скважинного прибора инклинометрической системы, а также его малые угловые параметры, значения которых определяют.
К малым угловым параметрам трехкомпонентного акселерометрического датчика относятся следующие:
- δХА - угол отклонения оси чувствительности акселерометра АX от оси 0ХА в плоскости 0XAZA;
- δYA - угол отклонения оси чувствительности акселерометра AY от оси 0YA в плоскости 0YAZA;
- χA - угол отклонения оси чувствительности акселерометра Ах от оси 0ХА в плоскости 0XAYA;
- σ1А - угол отклонения оси чувствительности акселерометра AZ от оси 0ZA в плоскости 0XAZA;
- σ2А - угол отклонения оси чувствительности акселерометра АZ от оси 0ZA в плоскости 0YAZA.
К малым угловым параметрам трехкомпонентного феррозондового датчика относятся следующие:
- δXF - угол отклонения оси чувствительности феррозонда FX от оси 0ХF в плоскости 0XFZF,
- χF - угол отклонения оси чувствительности феррозонда FX от оси 0ХF в плоскости 0XFYF;
- δYF - угол отклонения оси чувствительности феррозонда FY от оси 0YF в плоскости 0YFZF,
- γF - угол отклонения оси чувствительности феррозонда FY от оси 0YF в плоскости 0XFYF,
- σ1F - угол отклонения оси чувствительности феррозонда FZ от оси 0ZF в плоскости 0YFZF,
- σ2F - угол отклонения оси чувствительности феррозонда FZ от оси 0ZF в плоскости 0XFZF.
Пример конкретной реализации способа
Определение искомых параметров производят на поверочной установке, например, УАК-СИ-АЗВ, задавая вертикальное положение корпусу скважинного прибора инклинометрической системы (θ=0°) и горизонтальное (θ=90°) при постоянном значении угла азимута α=0°, выставляя последовательно значения визирного угла ϕ, равное 0°; 90°; 180° и 270°, и измеряя и занося при этом в массив данных информационные сигналы с трехкомпонентных акселерометрических преобразователей и трехкомпонентных феррозондовых преобразователей калибруемой инклинометрической системы. По значениям сигналов, хранящихся в массиве данных, рассчитывают искомые параметры акселерометрических преобразователей χA, δXA, δYA, σ1A, σ2А и феррозондовых преобразователей χF, γF, δXF, δYF, σ1F, σ2F, сохраняемые в файл конфигурации в качестве констант и используемые при эксплуатации инклинометрической системы для коррекции результатов измерений.
Для проверки заявляемого способа проведена калибровка инклинометрической системы ИС-48 на поверочной установке УАК-СИ-АЗВ и определены параметры акселерометрических преобразователей χA, δXA, δYA, σ1A, σ2A и феррозондовых преобразователей χF, γF, δXF, δYF, σ1F, σ2F, представленные в таблице.
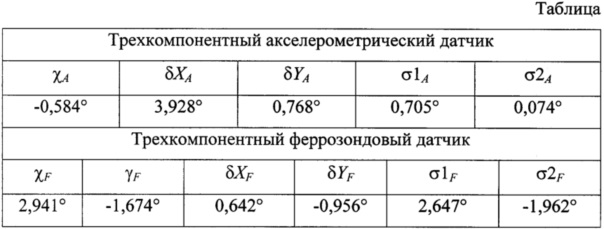
Таким образом, заявляемое изобретение позволяет определить все искомые параметры трехкомпонентных акселерометрических преобразователей - χA, δXA, δYA, σ1A, g2A и трехкомпонентных феррозондовых преобразователей - χF, γF, δXF, δYF, σ1F, σ2F, относящиеся к разряду постоянных параметров, т.е. констант, характеризующих конкретное конструктивное исполнение инклинометрической аппаратуры, что позволяет уменьшить погрешность измерений инклинометрических систем за счет определения данных малых угловых параметров и их учета при дальнейшей обработке результатов измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНЫХ ФЕРРОЗОНДОВЫХ МАГНИТОМЕТРОВ | 2022 |
|
RU2793283C1 |
| СПОСОБ СКВАЖИННОЙ ИНКЛИНОМЕТРИИ И СКВАЖИННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2770874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| ДАТЧИК МАГНИТНОГО АЗИМУТА | 1990 |
|
RU2018646C1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ ИНКЛИНОМЕТРА | 2013 |
|
RU2534866C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
Изобретение относится к области геофизики и может быть использовано для проведения калибровочных операций инклинометрических систем с трехкомпонентными феррозондовыми и акселерометрическими датчиками. Технический результат – уменьшение погрешности измерений инклинометрических систем. Сущность изобретения заключается в том, что магниточувствительный блок магнитометра инклинометрической системы устанавливают на поворотном столе так, что продольная ось одного из преобразователей оказывается совмещенной с вертикалью, а продольные оси двух других преобразователей оказываются лежащими в горизонтальной плоскости, искомые углы вычисляют в виде функций результатов преобразований. При этом также определяют углы отклонения гравичувствительных осей трехкомпонентного акселерометрического преобразователя, входящего в состав инклинометрической системы, от его собственных геометрических осей ортогонального базиса. Для этого на поворотном столе задают шесть пространственных положений корпуса скважинного прибора инклинометрической системы с трехкомпонентными акселерометрическими и феррозондовыми датчиками, характеризующихся визирным углом ϕ, зенитным углом θ и азимутальным углом α=0°. По измеренным сигналам с датчиков вычисляют шесть углов отклонения магниточувствительных осей феррозондов трехкомпонентного магнитометра и пять углов отклонения гравичувствительных осей трехкомпонентного акселерометрического преобразователя. 3 ил., 1 табл.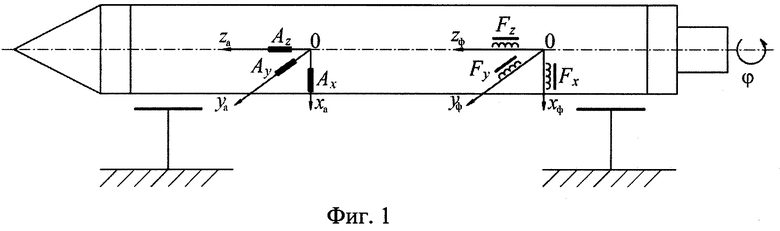
Способ определения углов отклонения магниточувствительных осей феррозондов трехкомпонентного магнитометра от его собственных геометрических осей ортогонального базиса, по которому определяют шесть углов непосредственно в геомагнитном поле на главном магнитном курсе 0° путем последовательных поворотов блока феррозондов вокруг горизонтальной оси, для этого магниточувствительный блок магнитометра устанавливают на поворотном столе так, что продольная ось одного из преобразователей оказывается совмещенной с вертикалью, а продольные оси двух других преобразователей оказываются лежащими в горизонтальной плоскости, искомые углы вычисляют в виде функций результатов преобразований, отличающийся тем, что также определяют углы отклонения гравичувствительных осей трехкомпонентного акселерометрического преобразователя от его собственных геометрических осей ортогонального базиса за счет выполнения операций, когда последовательно на поворотном столе задают шесть пространственных положений корпуса скважинного прибора инклинометрической системы с трехкомпонентными акселерометрическими и феррозондовыми датчиками, характеризующихся визирным углом ϕ, зенитным углом θ и азимутальным углом α=0°: задают зенитный угол θ=0° и визирный угол ϕ=0°, измеряют и заносят в массив значения сигналов gx1, gy1 и gz1 с акселерометров Ax, Ay и Az, сигналов mх1, my1 и mz1 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=0° и визирный угол ϕ=180°, измеряют и заносят в массив значения сигналов gx2, gy2 и gz2 с акселерометров Ax, Аy и Аz, сигналов mx2, my2 и mz2 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=0°, измеряют и заносят в массив значения сигналов gx3, gy3 и gz3 с акселерометров Аx, Аy и Аz, сигналов mx3, my3 и mz3 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=90°, измеряют и заносят в массив значения сигналов gx4, gy4 и gz4 с акселерометров Аx, Аy и Az, сигналов mx4, my4 и mz4 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=180°, измеряют и заносят в массив значения сигналов gx5, gy5 и gz5 с акселерометров Ах, Аy и Аz, сигналов mх5, my5 и mz5 с феррозондов Fx, Fy и Fz, задают зенитный угол θ=90° и визирный угол ϕ=270°, измеряют и заносят в массив значения сигналов gx6, gy6 и gz6 с акселерометров Аx, Аy и Аz, сигналов mx6, mу6 и mz6 с феррозондов Fx, Fy и Fz, и вычисляют значения малых угловых параметров с использованием обобщенных математических моделей для трехкомпонентного акселерометрического датчика:
 ,
,
где gx, gy и gz - приведенные значения сигналов с акселерометров соответственно Ах, Аy и Аz и трехкомпонентного феррозондового датчика:
 ,
,
где 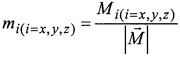 - приведенные значения измеряемых проекций вектора напряженности геомагнитного поля
- приведенные значения измеряемых проекций вектора напряженности геомагнитного поля  ,
,
 ,
,
по измеренным значениям сигналов gx1 и gy1 с акселерометров Аx и Аy вычисляют значения малых угловых параметров δXA и δYA:
 ,
,
по измеренному значению сигнала gz5 с акселерометра Az вычисляют значение малого углового параметра σ2A:
σ2А=arcsin(gz5),
по измеренным значениям сигналов gx4 и gx5 с акселерометра Ax вычисляют значение малого углового параметра χA:
 ,
,
по измеренным значениям сигналов gz1 и gz6 с акселерометра Az вычисляют значение малого углового параметра σ1A:
 ,
,
по измеренным значениям сигналов mx3, mx4, mx5 и mx6 с феррозонда Fx вычисляют значение малого углового параметра χF:
 ,
,
по измеренным значениям сигналов my3, my4, my5 и my6 с феррозонда Fy вычисляют значение малого углового параметра γF:
 ,
,
по измеренным значениям сигналов mz1, mz2, mz4 и mz6 с феррозонда Fz вычисляют значение малого углового параметра σ2F:
 ,
,
по измеренным значениям сигналов mz1, mz2, mz3 и mz5 с феррозонда Fz и определенному значению параметра σ2F вычисляют значение малого углового параметра σ1F:
 ,
,
по измеренным значениям сигналов mx1, mх2, mх4 и mх6 с феррозонда Fx и определенному значению параметра χF вычисляют значение малого углового параметра δXF:
 ,
,
по измеренным значениям сигналов my1, my2, my4 и my6 с феррозонда Fy и определенному значению параметра γF вычисляют значение малого углового параметра δYF:
 .
.
| Афанасьев Ю.В., Студенцов Н.В., Щелкин А.П | |||
| Магнитометрические преобразователи, приборы, установки | |||
| Л.: Энергия, 1972, стр | |||
| Приспособление для картограмм | 1921 |
|
SU247A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЛИБРОВОЧНОЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА (ВАРИАНТЫ) | 2003 |
|
RU2262711C2 |
| WO 2014134710 A1, 12.09.2014 | |||
| US 5606124 A1, 25.02.1997. | |||

