Известны устройства для захвата и расцепления |коитейиера с траиспортером, в которых захват осуществляемся механическим взаимодействием приводной конусообразной втулки с пальцем захвата, а расцепление производится на принципе электромагнитного отталкивания.
Предпожеиное устройство отличается от известного тем, что приводным элементом является палец, которьД срабатьшает под действием электромагнитных сил и выступ которого может зацепить различные предметы,, имеющие на торце выступы, выточки тл.
Кроме того, ось втулки эксцентрично расположена относительно оси корпуса устройства захвата, что обеспечивает надежность захвата и расцепления.
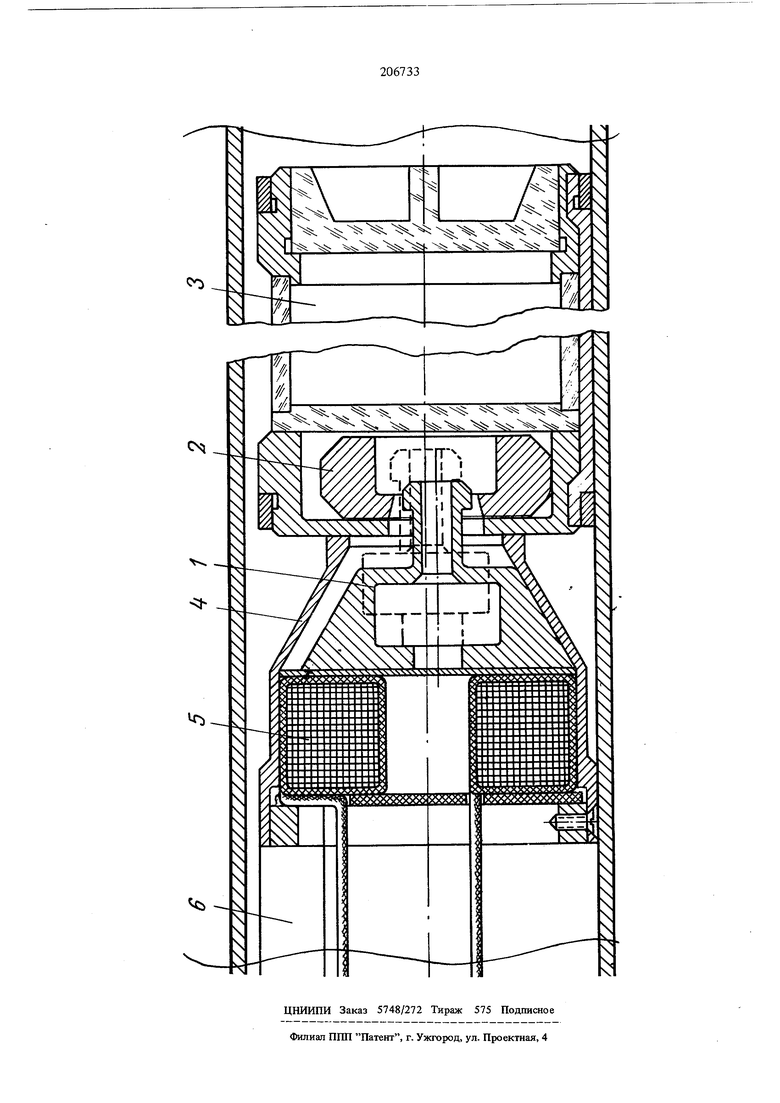
На чертеже изображено описываемое устройство. Оно выполнено из двух основных частей: приводного пальца захвата 1 и втулки 2 с внутренним круговым зубом. Втулка вмонтирована в гнездо торцовой части контейнера 3. Приводной палец захвата расположен в корпусе 4, в когорьш вмонтирована электрическая катуипса 5. Корпус устройства прикрепляется к торцовой части элек1ромагнит1ЮГО транспортера 6.
Штрих-пунктирной линией на чертеже показан палец захвата в момент за1(1еш1ения устройства с контейнером.
SВ исходном положении центральные оси привод jHoro пальца захвата и втулки с кольцевым зубом I соосны, но по отнощению к оси корпуса 4 устройст|ва ОКИ эксцентричны. При этом отверстие втулки 2 {больше наружного диаметра пальца с ее стороны.
0
При любом исходном положении устройства I захвата и контейнера всегда сохраняется указан1юе условие, так как втулка эксцентрично расположена относительно оси корпуса устройства захвата. Это достигается благодаря тому, что гнездо в торцовой
5 {части контейнера под втулку вьшолнено больик {диаметра втулки на величину двойного эксценгри|ситета,;что позволяет ей всегда находиться в нижжй части гнезда.
0
При необходимости извлечь контейнер из канала реактс а транспортер подводят торцом устройства захвата к торцу контейнера. При вк.чючмши :катуи1ки устройства к сети переменного кжа н jaiiмодействует магнитное поле катупжи и индуиирусмых на торцовой плоскости пальца захвата токов. Создается эффект магнитного отталкивания, которьш перемешает палец захвата от катушки. Благоцаря тому, что корпусы пальца и устройства имеют конический профиль, то при отталкивании пальца захвата от катушки его центральная ось совмещается с осью корпуса устройства. В результате этого выступ пальца входит под кольцевой зуб втулки, тем самым обеспечивая зацепление при транспортировке.
Расцепление производится, когда торец устройства подведен при вьпслюченной катушке 5 к .торцу контейнера.
Формула изобретения Индукционное устройство захвата - расцепления дня дистанционного перемещения контейнеров, содержащее корпус, в котором размещена электрическая катущка и конусообразный приводной палец захвата, отличающееся тем, что, с целью ПОВЫ1ШНИЯ надежности, в гнезде торцовой части контейнера расположена втулка с внутренним кольцевьш зубом, причем ось втулки эксцентрично расположена относительно оси кортуса устройства, а диаметр гнезда в торцовой части контейнера под втулку вьшолнен больше диаметра втулки на величину двойного эксцентриситета.