Известны стропы для подъема груза, содержащие постоянно подвешенные на неподвижных лальцах грузовые канаты с петлями и крюками, электромагнитный или другой известный привод.
Отличительной особенностью предлагаемого стропа является то, что он снабжен фиксирующим устройством, выполненным в виде фигурной подвижной планки, закрепленной фиксирующим устройством щарнирно к щеке стропа, один конец которой при рабочем положении входит в паз грузового подвижного пальца, а другой - щарнирно прикреплен к кронщтейну подвижной планки грузового подвижного пальца.
Такое выполнение стропа предотвращает самопроизвольную расстроповку груза.
Для возможности застроповки груза за монтажные оетли без грузов канатов грузовой подвижной палец расположен горизонтально в одной вертикальной плоскости по отношению к неподвижному пальцу для подвески стропа на крюк грузоподъемного механизма.
ханизма, который включается автоматически с помощью фигурной подвин ной планки, взаимодействующей с концевым выключателем, укрепленным на щеке стропа.
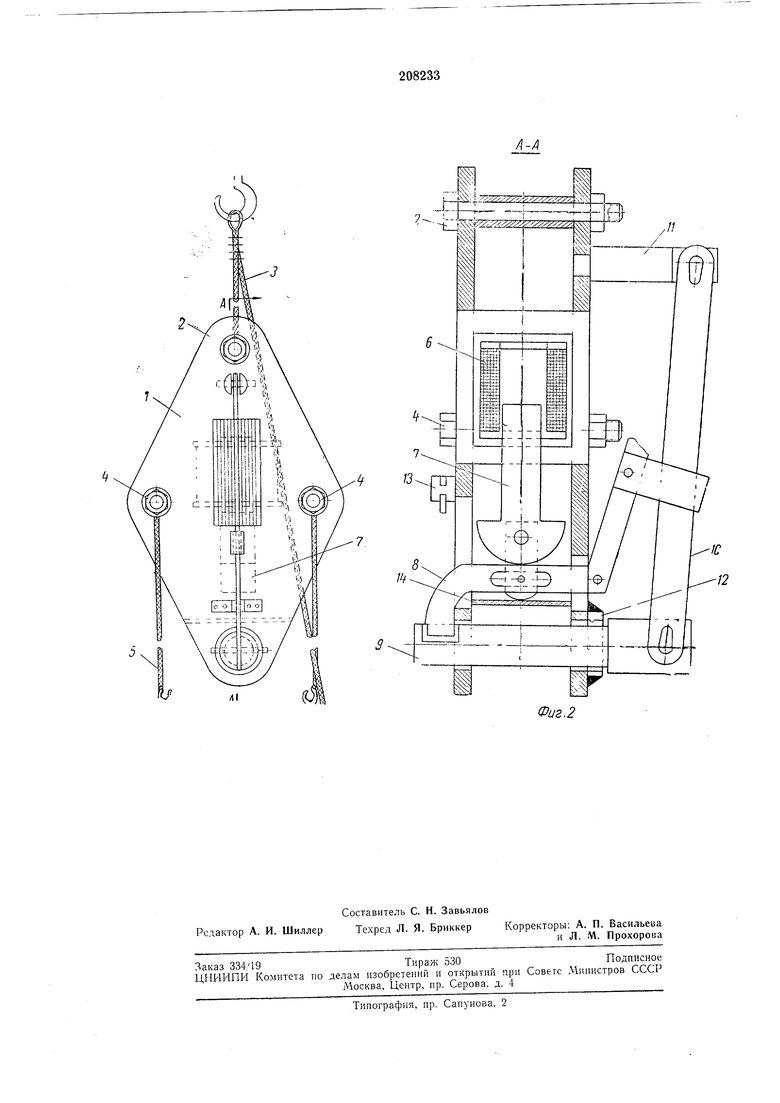
На фиг. 1 изображена схема описываемого стропа; на фиг. 2 - то же, вид сбоку, в разрезе. Строп выполнен из двух щек 1, соединеиных между собой пальцем 2 для подвески на крюк грузоподъемного механизма посредством стального каната 3, являющегося одновременно грузовым канатом, и двумя пальцами 4, на которые подвещены грузовые канаты 5 с крюками. Менаду щек / вмонтирован электромагнитный привод 6, сердечник 7 которого соединен с фигурной подвижной планкой 8. Грузовой подвижный палец 9 выполнен с пазом для захода в него одного конца
фигурной подвижной планки 8 и шарнирно соединен с кронштейном 10, закрепленным вторым концом к пальцу //. Направляющее кольцо 12 пальца 9 жестко прикреплено к щеке стропа. Концевой выключатель 13 звукового или светового сигнала смонтирован на щеке / стропа и сблокирован с фигурной подвижной лланкой 8. Менаду щек стропа смонтирована предохранительная планка 14, которая предохраняет сердечник 7 электрогрузовыми канатами или монтажными петлями при укладке груза или установке конструкции.
Для застроповки груза палец 9 выводится из щек /, поднимаемый груз захватывается канатом 3, петлю которого вводят между щек J и навешивают на палец Я который затем заводится в щеки стропа и автоматически запирается фигурной подвижной планкой 8, конец которой входит в паз пальца 9. Таким же образом захватываются грузы, имеющие монтажные петли, но непосредственно на палец 9 без грузовых канатов.
После подъема и укладки груза на место с -пульта управления подается напряжение на катушку электромагнитного привода 6, при этом сердечник 7, втягиваясь в катушку, подтягивает за собой лланку 8, выводя ее конец из паза пальца 9. После этого фигурная подвижная планка 8, продолжая движение, отодвигает кронштейн 10, который из щек / стропа выводит палец 9, освобождая при этом грузовые канаты или монтажные петли от грузового подвижного пальца и соответственно от груза. При этом фигурная планка 8 нажимает кнопку концевого выключателя 13, через контакты которого подается напряжение на звуковой или световой сигнал, установленный в кабине грузоподъемного механизма, который сигнализирует об окончании расстроповки груза.
Предмет изобретения
1.Строп для подъема груза, содержащий постоянно подвещенные на неподвижных
пальцах грузовые канаты с петлями и крюками, электромагнитный или другой известный привод, отличающийся тем, что, с целью предотвращения самопроизвольной расстроповки груза, он снабжен фиксирующим устройством, выполненным в виде фигурной подвижной планки, закрепленной шарнирно к щеке стропа, свободный конец которой при рабочем положении входит в паз грузового подвижного пальца, а второй конец шарнирно прикреплен к кронштейну подвижной планки грузового подвижного пальца.
2.Строп по п. 1, отличающийся тем, что, с целью застраповки груза за монтажные петли без грузовых канатов, грузовой подвижный палец расположен горизонтально в одной вертикальной плоскости по отношению к неподвижному пальцу для подвески стропа на крюк грузоподъемного механизма.
3.Строл по пп. I и 2, отличающийся тем, что, с целью возможности эксплуатации в
местах недоступных для обозрения, он связан с звуковым или световым сигналом, установленным в кабине грузоподъемного механизма, включение которого осуществляется автоматически с /помощью фигурной подвижной планки, взаимодействующей своим свободным концом с концевым выключателем, укрепленным на щеке стропа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для расстроповки | 1990 |
|
SU1759776A1 |
| ПОДЪЕМА ГРУЗА | 1965 |
|
SU168856A1 |
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1381055A1 |
| СТРОП ДЛЯ ПОДЪЕМА ГРУЗА | 1965 |
|
SU175631A1 |
| Грузозахватное устройство | 1977 |
|
SU691378A1 |
| Устройство для строповки колонн | 1987 |
|
SU1437341A1 |
| Захватное устройство для изделий с монтажными петлями | 1978 |
|
SU854864A1 |
| Канатный зажимной грузозахват | 1989 |
|
SU1773842A1 |
| Грузозахватное устройство | 1978 |
|
SU880944A1 |
| Грузозахватное устройство | 1984 |
|
SU1194818A1 |