со 00
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1976 |
|
SU607774A2 |
| Грузозахватная траверса | 1978 |
|
SU765186A1 |
| Замок для стропов | 1988 |
|
SU1527124A1 |
| ПОДЪЕМА ГРУЗА | 1968 |
|
SU208233A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2031071C1 |
| Замок для стропа | 1983 |
|
SU1197976A1 |
| ПОДЪЕМА ГРУЗА | 1965 |
|
SU168856A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
Изобретение относится к грузозахватным устройствам, предназначенным для автоматической расстроповки грузов. Целью изобретения является повышение надежности. Устройство содержит корпус 1, состоящий из соединенных между собой и шарнирно установленных на оси 2 щек 3. палец 4 для соединения с петлей груза, элемент 5 для навешивания на грузоподъем- ньв1 механизм, поворотный фиксатор 6 для груза, выталкиватель 10 последней, имеющий форму полуэл:п1пса, большая полуось которого ориентирована к вертикальной оси пальца 4, и планку 11, которая установлена на торце пальца 4 и соединена с щекой 3 корпуса разъемным соединением 15. До начала работ планку 11 освобождают, петлю 18 навешивают на падец 4, после чего планку 11 фиксируют разъемным соединением 15, соединяя с щекой 3. Для навешивания петли 19 стропа 17 щеки 3 поворачивают относительно оси 2 в горизонтальное положение до образования зазора между поворотным фиксаторо -: 6 и пальцем 4. Расстропов- ка груза производится при опускании крюка грузоподъемного механизма. Устройство занимает положение ниже места строповки груза, поэтому происходит поворот щек 3 с образованием аазора, при этом выталкиватель 10 поворачивается с осью 2 и выталкивает петлю 19 в образовавшийся зазор. 2 ил. (Л
ел
СП
Изобретение относится к грузозахватным устройствам, предназначенньм для автоматической расстроповки грузов .
Цель изобретения - повьш1е ие на- лежиости.
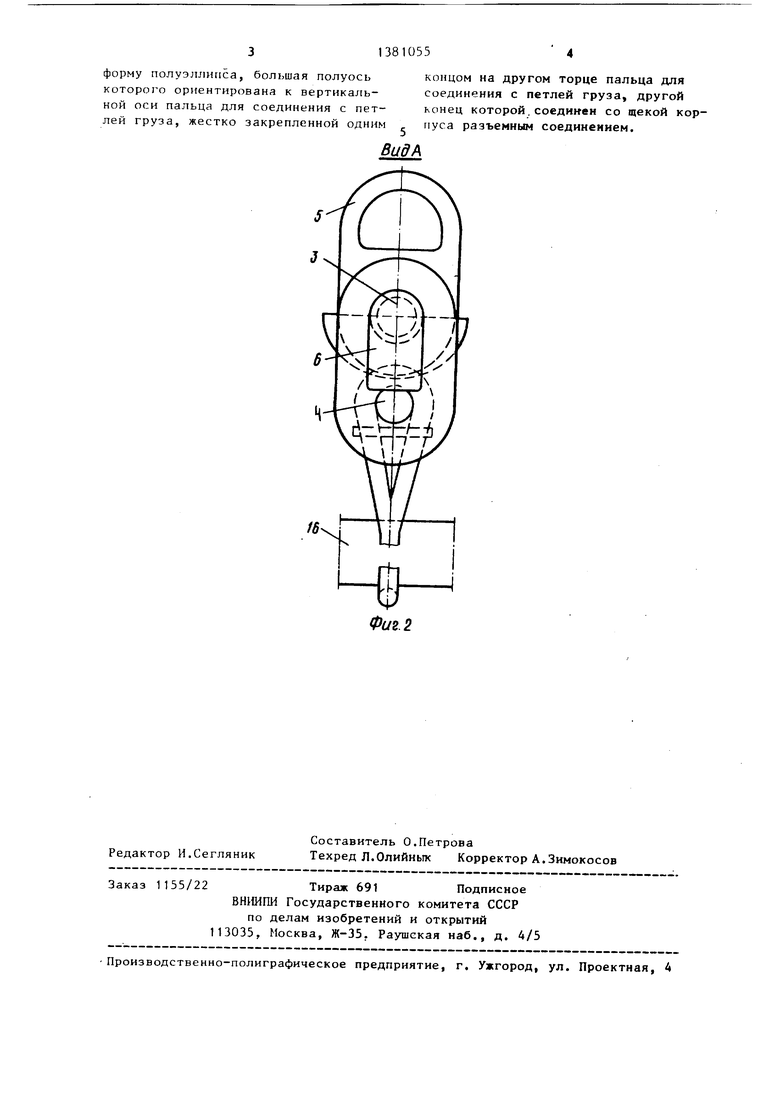
1а фиг. 1 изображен общий вид уст poi icTBa; на фиг. 2 - вид Л па фиг.1.
CaмooтцeIlляlol; eecя захватное устройство содержит корпус 1, состоя- ШИ1 из соединенных 1ежду собой и iiiap иирно установленных на оси 2 щек 3, лллед 4 д,ля соединения, с петлеГ( груза, г1рох() через щеки 3 корпуса 1 под осью 2. элемент 5 д.ля навешивания на гру:.и111од71емны11 механизм и rio- HopiiTHMii фиксатор 6 для петли г руза.
Элемент 5 для нодвеиишания на грузог1од11емный механизм представляет собой пластину, жестко установленную на оси 2 между щеками 3 корпуса 1. lIoBopoTHi.iii фиксатор 6 представл ет соСкп планку, од1П конец 7 KOTopoit жост1 о соединен с тордем оси 2 корпус,: 1 , а С1 ободный конец 8 paз feIцeI со сторчш. одного 9 то1тца ттальда 4 для С(.1едиис ния с петлей груза. Планк 6 Bf ino;i eHa с и:ириной, болыпеГ или paBHOi i ;иa :eтpy оси 2 корпуса 1 и бс1льи;е11 диаметра нальда 4.
Устройство снабжено жестко установленным 1ТОД углом на оси 2 Koiinyc; 1 между п; анкой 6 и и1екой 3 корпус.а 1 ,iT алкивателем 10 петли груза, имеилдим форму полуэ.ллипса, большая полуось KOTOpoi o ориентирована к вер тика:1ьно11 оси нальна 4 для соединения с петлей груза, и планкой 11, жестко закреплеино одним ксчпк м 12 на другом торне 13 пальда 4 д,ля соединения
neTJieii груза, другой
которой С ол динен со цекои
3
конец корнуса 1 разъемп1)1м соединением 15.
Самоотдепляющееся захватное устройство может быть применено при подъеме т руза, имеющего петли, и:1И при подъеме г руза, застропленного грузовым стопором, имеющим ncTjni на своих концах.
Самоотцепляющееся захватное уст- ройствс при под11еме груза 16, заст- рог1ленн(1го грузовым стропом 17, имеющим на своих концах нет;н1 18 и 19, работает с.ледующим (образом.
7До начала работ освобождают планку 11, и петлю 18 навешивают на пале 4, после :)то1 о конец 14 планки 11
раз1лемп1,м соединением 15, жестко соединяют со щекой 3 корпуса 1,
Элемент 5 наве1ливается на крюк г рузоподъемного механизма. Щеки 3 FtpyMuyio 1 оиорачива1отс:я в горизонтальное положение. Поворотный фиксатор Ь, жестко соединенны с осью 2, остается в вертикальном полс жегин, тогда
К 11 палец 4 смещается относител1 но поворотного фиксатора 6 в сторону, образуя зазор, достаточный для заведения петли 19 стропа 17. Когда уст- poiic ino занимает ве11тикальное гюложение, 11ов(1ротный фиксатор 6 нерекры- вает зазор, чем исключается возможность с ,1мопроизвол1.ног о В1 1паления петли 19 стропа 17 с пальца 4.
: ич-1-роп(1вка груза производится
при опускапии крюка грузоподъемного Mexaiiu tMa. зтом у;:тройство занимает и(1Л(1 ленпе ниже места строповки груза, поэтому 1роисходит поворот щс-к ) 1111круг оси 2. г рань выталкилателя 0. име1 :чиая ijjopMy полу- члиипс;:, поворачиваяс}, с оС1)Ю 2, иыталкинает петл1и 19 стропа 17 с пальп; 4 в зазор, об азовав1 Н11{ся мелчду 11:1льдем 4 и поворотным фиксатором И. При этом, петля 18 строна 17 остается на пальце 4.
|р
Р
и
о б р е т е н и я
5
0
5
0
5
С амоотдег1ляю1цееся завхатное уст- ройс:тво, содержащее корпус из соединенных меисцу собой и шарнирно уста- новлслш.к на щек, палец для соединения с петле груза, проходящий через щеки корпуса под осью, элемент для 11одве11Н1вания на грузоподъемный механизм и поворо пнли фиксатор для петли груза, о т л и ч а ю щ е е с я тем, n(1, с целью повышения надежности, DJieMiMfT для подвешивания на грузоподъемный механизм жестко установлен на оси между щеками корпуса, по- ворогны) фиксатор прелстапляет собой планку, один конец которой жестко соединен с торцом оси корпуса, а сво- бодн.гй конец размещен со стороны одного -горца пальца для соедпнения с петле груза, выпо:п1енную с ишри- ной, большей и.чи paBnoii диаметру оси корпуса н бс:1ЛЫ11ей диаметра упомянутого пальца, ycTpoi icTBO снабжено жестко установленным под углюм на оси корпуса между планко и щекой выталкивателем neTjH Г)уза, имеющим
форму полуэллипса, большая полуось которого ориентирована к вертикальной оси пальца для соединения с петлей груза, жестко закрепленной одним
16
концом на другом торце пальца для соединения с петлей груза, другой конец которой,соединен со щекой корпуса разъемным соединением.
Вид/
| Самоотцепляющееся захватное устройство | 1982 |
|
SU1137054A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
