Изобретение относится к подъемно- транспортным машинам и представляет собой разновидность грузового стропа, применяемого для захватывания пакетов груза, обжимаемого при этом тем же стропом, отклоняемым при помощи ролика.
Известны строповые грузозахватные устройства. Они показаны, например, на рис. 176 и 177 книги Волкова И.Г. и др. Справочник механизатора морского порта, изд. Морской транспорт, М., 1959. Известно также устройство по авт.св. № 69399 (прототип). Оно содержит раму, имеющую листовые щеки и направляющую криволинейной формы с углублением для каната, имеются также основной и вспомогательный канаты, поворотный эксцентрик с рукояткой, крюк, защелка и чека.
Основной недостаток прототипа - длительность ручных операций как при защемлении основного каната под нагрузкой, так и при освобождении его от груза. Большая длитепьность является следствием наличия чеки, защелки и вспомогатепьного каната.
Цель изобретения - повышение быстродействия устройства, что позволит повысить производительность труда при выполнении перегрузочных работ и уменьшить физическую нагрузку рабочего.
Устройство состоит из стропа с двумя петлями на концах и корпуса в виде двух параллельных щек, между которыми размещены ролик для отклонения стропа, стропо- вочный палец и эксцентриковый прижим на поворотной оси с рукояткой вне корпуса, Причем палец оснащен двумя головками на концах, в щеках для него сделаны овальные отверстия, одно из которых имеет у внутреннего края цилиндрическое расширение диаметром больше диаметра головки пальца, а рукоятка расположена так, что при незащемленном стропе она перекрывает расширение овального отверстия, препятствуя движению пальца под нагрузкой вдоль щек.
На фиг.1 изображен общий вид устройства под нагрузкой; на фиг,2 - то жехбез нагрузки (здесь видно, как строп заклинен между прижимом и роликом, благодаря чему корпус удерживается на стропе, не опуСО
С
1
Ч СА 00
ю
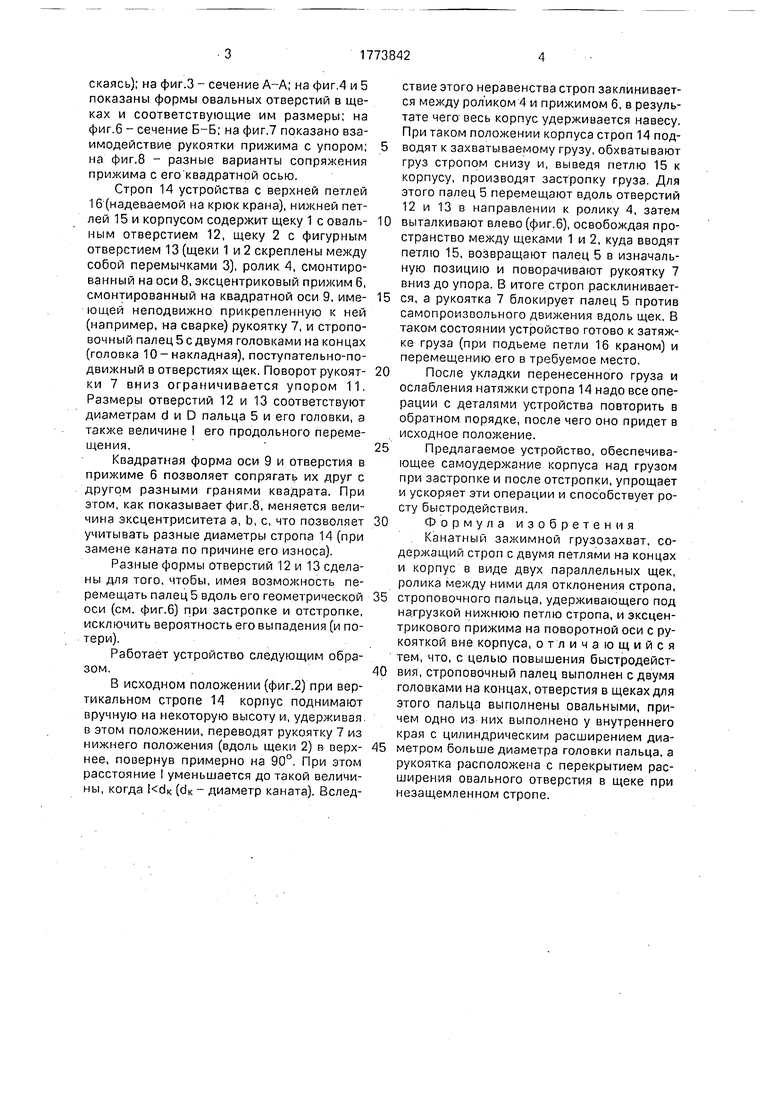
скаясь); на фиг.З - сечение А-А; на фиг,4 и 5 показаны формы овальных отверстий в щеках и соответствующие им размеры; на фиг.б - сечение Б-Б; на фиг.7 показано взаимодействие рукоятки прижима с упором; на фиг.З - разные варианты сопряжения прижима с его квадратной осью.
Строп 14 устройства с верхней петлей 16 (надеваемой на крюк крана), нижней петлей 15 и корпусом содержит щеку 1 с овальным отверстием 12, щеку 2 с фигурным отверстием 13 (щеки 1 и 2 скреплены между собой перемычками 3), ролик 4, смонтированный на оси 8, эксцентриковый прижим 6, смонтированный на квадратной оси 9, имеющей неподвижно прикрепленную к ней (например, на сварке) рукоятку 7, и стропо- вочный палец 5 с двумя головками на концах (головка 10-накладная), поступательно-подвижный в отверстиях щек. Поворот рукоятки 7 вниз ограничивается упором 11. Размеры отверстий 12 и 13 соответствуют диаметрам d и D пальца 5 и его головки, а также величине I его продольного перемещения.
Квадратная форма оси 9 и отверстия в прижиме 6 позволяет сопрягать их друг с другом разными гранями квадрата. При этом, как показывает фиг.8, меняется величина эксцентриситета а, Ь, с, что позволяет учитывать разные диаметры стропа 14 (при замене каната по причине его износа).
Разные формы отверстий 12 и 13 сделаны для того, чтобы, имея возможность перемещать палец 5 вдоль его геомет рической оси (см. фиг.б) при застропке и отстропке, исключить вероятность его выпадения (и потери).
Работает устройство следующим образом.
В исходном положении (фиг.2) при вертикальном стропе 14 корпус поднимают вручную на некоторую высоту и, удерживая в этом положении, переводят рукоятку 7 из нижнего положения (вдоль щеки 2) в верхнее, повернув примерно на 90°. При эгом расстояние I уменьшается до такой величины, когда (dt - диаметр каната). Вследствие этого неравенства строп заклинивается между роликом 4 и прижимом б, в результате чего весь корпус удерживается навесу. При таком положении корпуса строп 14 подводят к захватываемому грузу, обхватывают груз стропом снизу и, выведя петлю 15 к корпусу, производят застройку груза. Для этого палец 5 перемещают вдоль отверстий 12 и 13 в направлении к ролику 4, затем
выталкивают влево (фиг.б), освобождая пространство между щеками 1 и 2, куда вводят петлю 15, возвращают палец 5 в изначальную позицию и поворачивают рукоятку 7 вниз до упора. В итоге строп расклинивается, а рукоятка 7 блокирует палец 5 против самопроизвольного движения вдоль щек. В таком состоянии устройство готово к затяжке груза (при подъеме петли 16 краном) и перемещению его в требуемое место.
После укладки перенесенного груза и ослабления натяжки стропа 14 надо все операции с деталями устройства повторить в обратном порядке, после чего оно придет в исходное положение.
Предлагаемое устройство, обеспечивающее самоудержание корпуса над грузом при застропке и после отстропки, упрощает и ускоряет эти операции и способствует росту быстродействия.
Формула изобретения
Канатный зажимной грузозахват, содержащий строп с двумя петлями на концах и корпус в виде двух параллельных щек, ролика между ними для отклонения стропа,
строповочного пальца, удерживающего под нагрузкой нижнюю петлю стропа, и эксцентрикового прижима на поворотной оси с рукояткой вне корпуса, отличающийся тем, что, с целью повышения быстродействия, строповочный палец выполнен с двумя головками на концах, отверстия в щеках для этого пальца выполнены овальными, причем одно из них выполнено у внутреннего края с цилиндрическим расширением диаметром больше диаметра головки пальца, а рукоятка расположена с перекрытием расширения овального отверстия в щеке при незащемленном стропе.
/
Jj&e.
Pve.Ј
.П1
| название | год | авторы | номер документа |
|---|---|---|---|
| Замок стропа | 1986 |
|
SU1446083A1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
| Строповочный замок | 1985 |
|
SU1393751A1 |
| Крановый полуавтоматический захват | 1990 |
|
SU1785991A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ РАССТРОПОВКИ ГРУЗА | 2003 |
|
RU2267456C2 |
| Грузозахватное устройство | 1980 |
|
SU931656A1 |
| Крановый ковшовый захват | 1977 |
|
SU724428A1 |
| Грузозахватное устройство | 1989 |
|
SU1726355A1 |
| Строп для подъема груза | 1958 |
|
SU152295A1 |
| Строп для подъема грузов | 1958 |
|
SU116834A1 |


Использование: подъемно-транспортное машиностроение, в частности грузоподъемные средства. Сущность изобретения1 устройство содержит грузовой строп и корпус, выполненный из двух параллельных щек и поступательно-подвижного стро- повочного пальца, которой, прижимая строп к ролику, заклинивает его, обеспечивая при этом самоудержание корпуса на весу. Стро- повочный палец имеет на концах две головки и размещен в овальных отверстиях щек, одно из которых имеет цилиндрическое расширение диаметром больше диаметра головки пальца, перекрываемое рукояткой прижима при незащемленном стропе, 8 ил.
г/м
0шА#аЬос {/ а - а
ff-7 Z7
&
cusA// a t/
s tT-tf
IWILL
9
З&ф С .±/у/г7&
&
PV2.7
Риг.3
6
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ШТУЧНЫХ ГРУЗОВ, ПРЕМУЩЕСТВЕННО МАЧТ, СТОЛБОВ И Т. П. ПРИ ИХ УСТАНОВКЕ | 1945 |
|
SU69399A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
