,1
Захваты для штучных грузов, снабженных рымами, включающие смонтированные в корпусе захватные лапы и привод для их перемещения, известны.
Предлагаемый захват отличается тем, что, с целью применения его во взрывоопасном помещении без визуального наблюдения за процессом захвата и освобождении груза, привод для перемещения лап выполнен в нем в виде пневмоцилиндра. Подача воздуха в цилиндр осуществляется через блокировочные клапаны, срабатывающие при взаимодействии их с грузом, а к щтоку цилиндра прикреплен рычаг, поочередно взаимодействующий с клапанами звуковых пневматических сигнализаторов загрузки и разгрузки захвата.
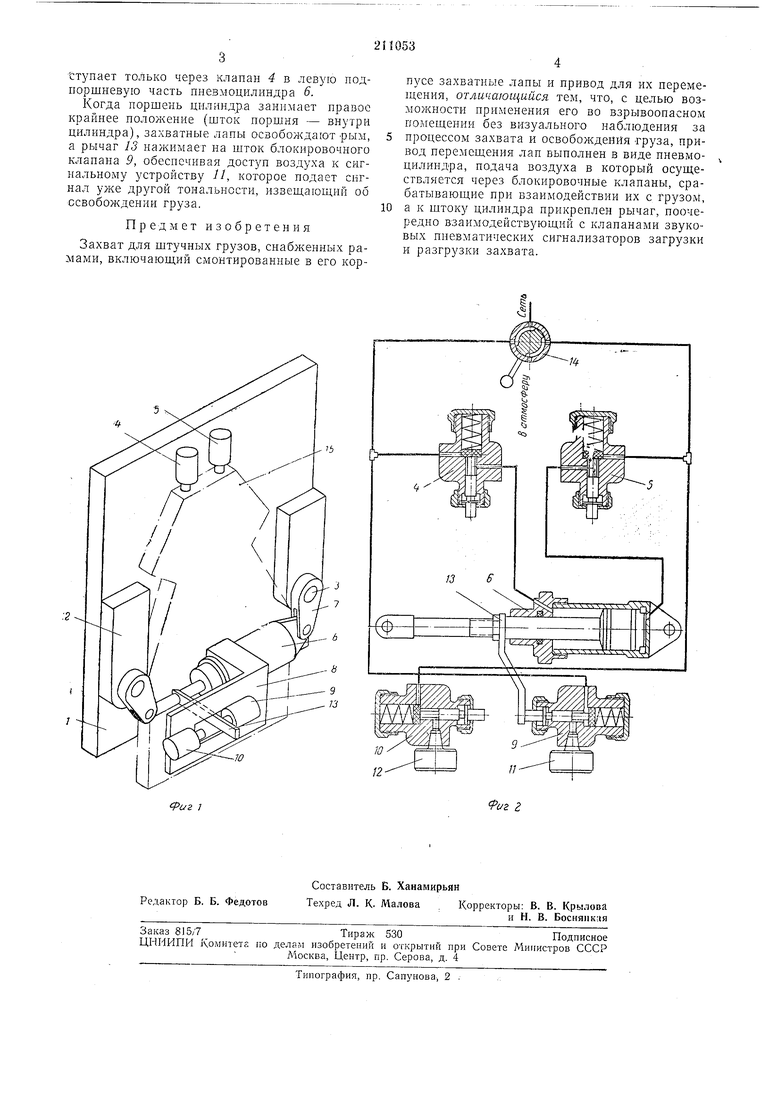
На фиг. 1 изображен захват в аксонометрии; на фиг. 2 - пневматическая схема.
В корпусе 1 смонтированы лапы 2 в виде прямоугольных .рычагов, закрепленных на осях 3, и два нажимных блокировочных клапана 4 и 5. С наружной стороны корпуса смонтирован пцевмоцилиндр 6, шарнирно соединенный с тягами 7, также закрепленными на осях 3 захватных лап. На кронщтейне 8, жестко соединенном с пневмоцилиндром 6, установлены два блокировочных клапана 9 и 10 с сигнальными устройствами 11 и 12.
панов 9 и 10, управляемый с помощью крана 14, который находится на пульте управления. В зависимости от полол ения рукоятки крана сжатый воздух подается через клапан 4 или 5 в блокируемую систему. Необходимое условие для работы захвата - наличие рыма 15 на поднимаемом грузе.
Работает захват следующим образом.
При опускании захвата на груз рым 15 выходит в отверстие корпуса и, перемещая штоки блокировочных клапанов 4 и 5, обеспечивает доступ сжатого воздуха в линию. Поскольку рукоятка крана 14 установлена в положение захвата, сжатый воздух поступает только через клапан 5 в правую подпорщневую камеру цилиндра 6.
Когда поршень цилиндра 6 занимает крайнее левое положение, захватные лапы перемещаются в .гнезда рыма, а рычаг 13 нажимает на шток блокировочного клапана 10, обеспечивая доступ воздуха к сигнальному устройству 12. Последнее подает сигнал о том, что груз можно поднимать и перемещать краном. При подъеме груза рым 15, опускаясь на захватные лапы, освобождает штоки блокировочных клапанов 4 и 5 Н тем самым отключает управления пневмоцилиндром. При освобождении груза рым нажимает на штоки клапанов. Рукоятка крана 14 устанавливается в положение «освобождение груза, и сжатый воздух поступает только через клапан 4 в левую подпоршневую часть пневмоцилипдра 6.
Когда поршень цплйндр.а занпмает правое крайнее положение (шток поршня - внутри цилиндра), захватные лапы освобождают рым, а рычаг 13 нажимает на шток блокировочного клапана 9, обеспечивая доступ воздуха к сигнальному устройству 11, которое подает сигнал уже другой тональности, извеш:аюш,пй об освобождении груза.
Предмет изобретения
Захват для штучных грузов, снабженных рамами, включаюш;ий смонтированные в его корпусе захватные лапы и привод для их перемещения, отличающийся тем, что, е целью возможности применения его во взрывоопасном помеш;енин без визуального наблюдения за
процессом захвата и освобождения груза, привод перемешения лап выполнен в виде пневмоцилиндра, подача воздуха в который осуществляется через блокировочные клапаны, срабатывающие при взаимодействии их с грузом,
а к щтоку цилиндра прикреплен рычаг, поочередно взаимодействующий с клапанами звуковых пневматических сигнализаторов загрузки и разгрузки захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU872251A1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1972 |
|
SU334164A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1965 |
|
SU172971A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В ТАЛЕВОЙ СИСТЕМЕ | 2000 |
|
RU2176016C1 |
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ АВТОСЦЕПОК | 1970 |
|
SU287376A1 |
| Захватное устройство для бесподдоной транспортировки пакетов штучных грузов | 1960 |
|
SU142393A1 |
| Устройство для блокировки крышки сосуда под давлением | 1974 |
|
SU497441A1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Машина для замены фурм доменных печей | 1979 |
|
SU863650A1 |
