Изобретение относится к вычислительной технике и может быть использовано при графическом интегрировании и дифференцировании уравнений вида ) / а также для обработки информации, поступающей в виде графиков, например, кривых автоматической записи и механизации вычисления интегралов и дифференциалов функций,за.данных в виде кривых.
Наиболее близким к изобретению является интегрирующий механизм, содержащий планшет и укрепленную на нем первую направляющую с первой кареткой, которая движется по направляющей с помощью ножевого колёса, которое вращается вокруг оси второй каретки,движущейся по второй направляющей, перпендикулярной первой направляющей, третью каретку, которая движется по второй каретке параллельно первой направляющей, кулису, связанную шарнирно с ножевым колесом и третьей кареткой 1.
Недостатками известных механизмов являются сложность конструкции, неудобство в эксплуатации и невозможность изменения масштаба решения задач без изменения масштаба заданной функции.
Цель изобретения - упрощение конструкции и повышение удобства в эксплуатации, а также обеспечение возможности изменения масштаба решения задач.
Поставленная цель достигается тем, что в устройство, содержащее планшет и укрепленную на нем по оси У первую
10 направлякицую с первой кареткой, на которой перпендикулярно первой направляющей неподвижно закреплена вторая направляющая с второй кареткой, при этом на второй каретке закреплен
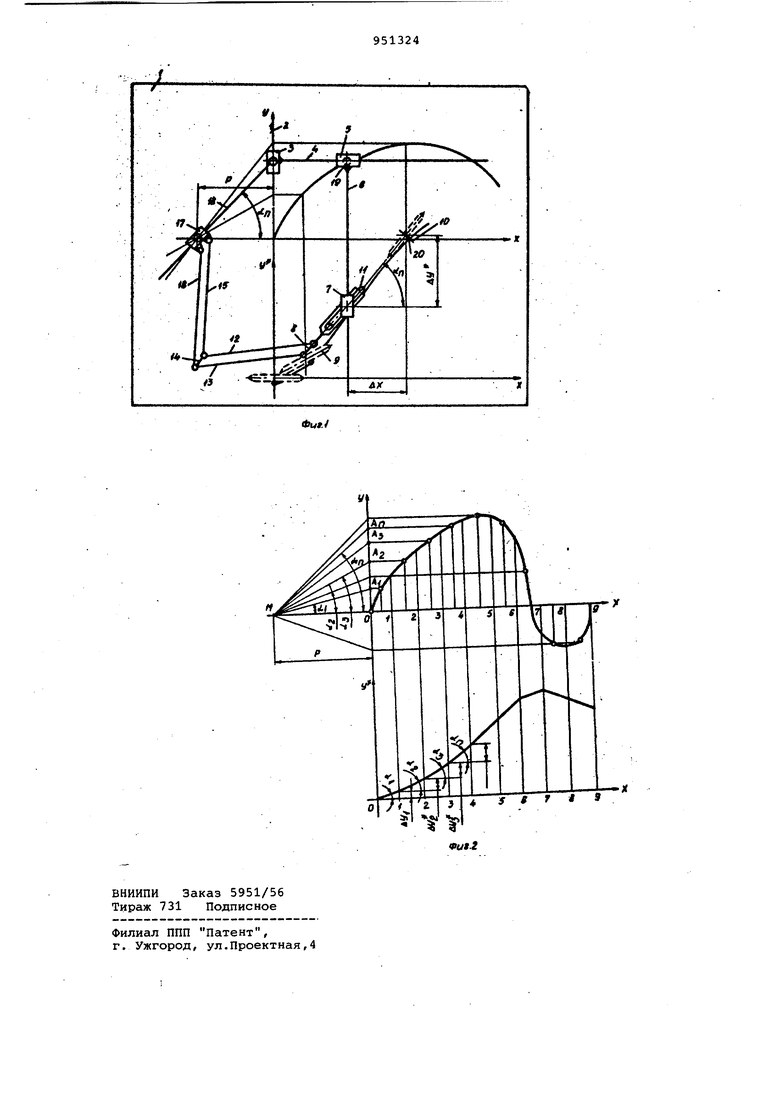
15 обводной штифт и третья направляющая, перпендикулярно второй направляющей, с третьей кареткой, на которой закреплен второй обводной штифт и шарнирно закреплено ножевое колесо, свя20занное с направлянкцим звеном, дополнительно введены параллелограммный механизм, направляющее звено, направляющая втулка и кулиса, причем направляющее звено посредством парал25лелогр-аммного механизма связано с направляющей втулкой, установленной шарнирно на планшете на оси X слева от начала координат, через направляющую втулку пропущена кулиса, шарнир30но связанная с первой кареткой. На фиг.1 изображена схема механиз ма вид в плане; на фиг.2 - пояснение метода графического интегрирования. Механизм (фиг,1) содержит планшет 1, на котором неподвижно расположена первая направляющая 2 с первой карет кой 3, на каретке 3 неподвижно установлена вторая направляющая 4, перпендикулярно первой направляющей, с второй кареткой 5, на которой неподвижно установлена третья направляющая б, перпендикулярно второй нап равляющей 4, с третьей кареткой 7, связанной шарнирно с направляющим эвеном 8 параллелограммного механизма, на котором с помощью обоймы 9, снабжеиной осью 10, перпендикуляр ной звену 8, установлено ножевое коле со 11, Параллелограммный механизм, состоящий из звеньев 8,12,13,14,15 и 16 шарнирно связан с помощью звеньев 15 и 16 с направляющей втулкой 17, установленной юарнирно на планшете на продолжении оси V на некотором расстоянии Р от начала координат. Первая каретка 3 шарнирно связана с кулисой 18, образующей -поступательную пару с направляющей втулкой 17. Снизу к каретке 5 и 7 закреплены неподвижно обводные штифты 19 и 20. Предлагаемый интегрирующий механизм разработан на основе метода графического интегрирования. Этот метод основан на применении интегрирования по способу конечных разностей. Согласно этому методу заданную функцию разбивают на ряд интервалов конечной длины по изменению независимого переменного. В пределах одного интервала обозначенного ЛУ, значение функции принимают постоянным и равным ее среднему значению т.е. площадку под элементом кривой заменяют площадью равновеликого прямоугольника (фиг.2). Разбивая ось абсцисс на некоторое число произвольных отрезков ДХ и выбираем на продолжении оси некоторую точку М , находящуюся на расстоянии Р от начала координат,, затем проводя через средние значения функции на каждом интервале линии параллельные оси до пересечения с осью X со единим полученные точки с точкой W , получаем лучи МА ; MA, и т.д. Затем на графике, начиная с нулевой точки, последовательно на каждом интервале проводя лучи параллельные лучам MA , МА и т.д. получаем кривую, заданную в виде отрезков прямых линий, при этом оказывается, что A UXtgd ; .AXig-el ;...; , , откуда v v ...-«-Л V 5 л ((,.. ..4 tea.v,) (.,рйдх- 0 CR и У I Рассмотрим принцип действия предлагаемого механизма. Пусть задана графически некая функция ) f (х). При обводе заданной кривой обводным штифтом 19 ножевое колесо 11 все время проворачивается; оставаясь параллельным кулисе 18 и вращаясь относительно оси 10, описывает интеграшьиую кривую, обводной штифт 20 очерчивает кривую идентичной кривой, описываемой ножевым колесом. При обводе заданной кривой- обводным штифтом 20, обводной штифт 19 вычерчивает дифференциальную кривую (фиг.1). Пунктиром на фиг.1 показано ножевое колесо в нескольких положениях при интегрировании. Таким образом, предлагаемый механизм лишен-недостатков известного, так как передвигаются по оси X только две каретки с направляющей, и параллелограммный механизм, причем ось вращения Ножевого колеса не меняет своего положения относительно управляемой им каретки. Кроме тог.о, меняя расстояние р , мы получаем возможность менять масштаб построения искомой функции, не меняя масштаба заданной для получения необходимой точности. Формула изобретения Механизм для 1рафического интегрирования, содержащий планшет и укрепленную на нем по оси первую направляющую с первой кареткой, на которой перпендикулярно первой направляющей неподвижно закреплена вторая направляюЩая с второй кареткой, при этом на второй каретке закреплен обводной штифт и третья направляющая, перпендикулярно второй направляющей, с третьей кареткой, на которой закреплен второй обводной штифт и шарнирно закреплено ножевое колесо, связанное с направляющим звеном, отличающийся тем, что, с целью упрощения конструкции и повышения удобства в эксплуатации, а также обеспечения возможности изменения масштаба решения задач, он содержит параллелограммный механизм, направляющее звено, направляквцую втулку и кулису, причем направляющее звено посредством параллелограммного механизма связано с направляющей втулкой, установленной шарнирно на планшете на оси X слева от начала координат, через направляющую втулку пропущена кулиса, шарнирно связанная с первой кареткой. - Источники информации, принятые во внимание при экспертизе 1. Артоболевский И.И. Механизмы в современной технике, том II, Наука, м., 1971, с;320 (прототип).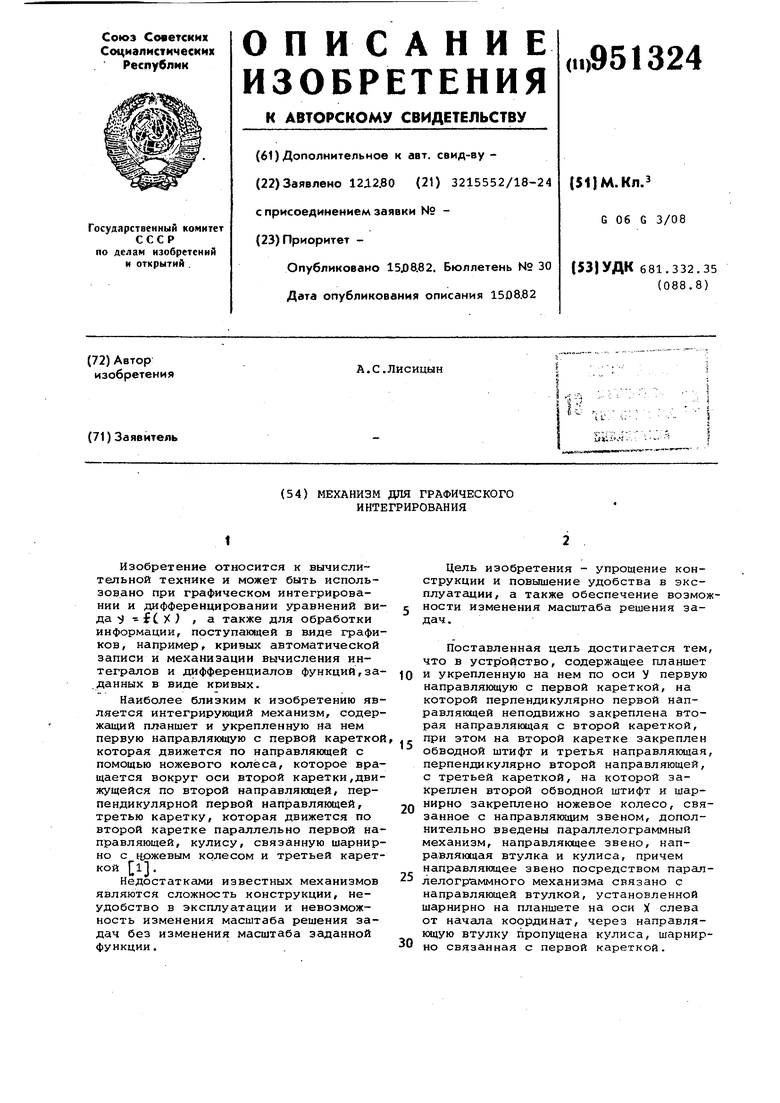
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический интегратор | 1980 |
|
SU957221A1 |
| Интегрирующее устройство | 1975 |
|
SU710047A1 |
| Кулисно-рычажный механизм интеграфа Мамырина | 1988 |
|
SU1539796A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ И ПОЛИРОВАНИЯ И ВОГНУТЫХ АСФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 1971 |
|
SU305041A1 |
| Прибор для вычерчивания аксонометрических проекций | 1983 |
|
SU1094760A1 |
| Интегратор | 1938 |
|
SU56663A2 |
| Полярный интеграф | 1958 |
|
SU120653A1 |
| Устройство для трансформирования объемных тел | 1976 |
|
SU765028A1 |
| Прибор для построения панорамной перспективы | 1974 |
|
SU517520A1 |
| УЧЕБНЫЙ ПРИБОР ПО ПЕРСПЕКТИВЕ | 2005 |
|
RU2290699C1 |