Известны механизмы для управления шпинделем ультразвукового станка с механической осцилляцией и с ручным подъемом и опусканием инструмента.
В описываемом механизме обеспечивается взаимная блокировка ручного и механического приводов шпинделя.
Достигается это тем, что храповик закрыт двумя торцовыми чашками с периферийными вырезами и вторая чашка имеет дуговой паз для пальца храповика.
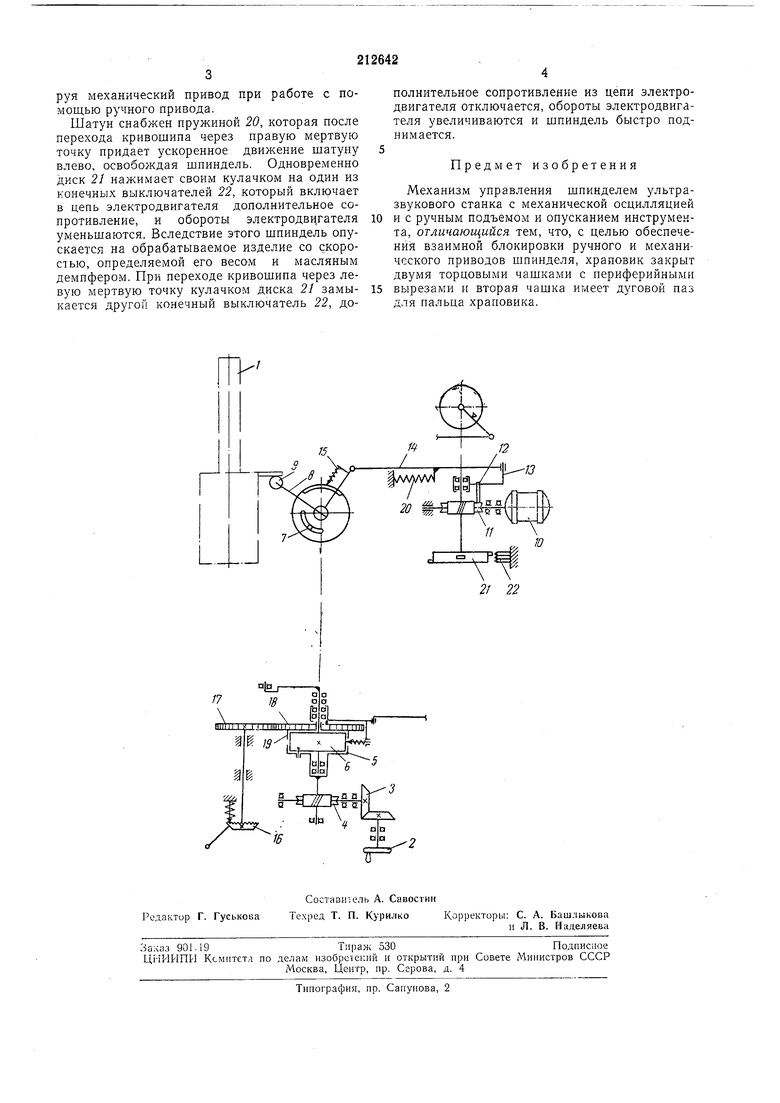
На чертеже показана кинематическая схема описываемого механизма управления в двух проекциях.
Механизм предназначен как для ручного, так и для механического привода шпинделя 1 ультразвукового станка.
Ручной привод осуществляется с помощью маховика 2, вращение от которого через конические шестерни 3 и червячную пару 4 передается чашке 5, внутри которой размещено храповое колесо 6 с пальцем 7, который входит в ее дуговой паз. Чашка 5 свободно поворачивается до контакта конца дугового паза с пальцем 7, после чего начинает поворачиваться храповое колесо, связанное с рычагом 6. Последний несет на своем конце ролик 5, который поднимает шпиндель. При обратном вращении маховика щпиндель опускается до контакта с обрабатываемой деталью, после
чего Произвсаится доп-олнительный поворотчашки 5. При этом палец 7 выходит из контакта с концом дугового паза, и щпиндель полностью освобождается. Вследствие этого обеспечивается свободное внедрение инструмента в обрабатываемое изделие с заданным усилием, определяемым весом шпинделя. Скорость внедрения регулируется масляным демпфером (па чертеже не показан).
При механическом приводе щпинделю придается осциллирующее движение, необходимое для калибровки полученных при обработке отверстий. Механическое управление осуществляется с помощью электродвигателя 10, который с помощью червячной пары // и пальца 12 приводит во вращение кривошип 13. ПоследНИИ связан с шатуном 14, придающим собачке /5 возвратно-вращательное движение. При
этом собачка, входя в зацепление с зубьями колеса, также придает ему возвратно-вращательное движение. Величина углового перемещения колеса регулируется лимбом /б, связанным с шестерней 17. Последняя находится
в зацеплении с шестерней 18, которая своей чашкой 19 частично перекрывает сектор храпового колеса в зоне качания собачки и тем самым ограничивает количество захватываемых собачкой зубьев. Чашка 5 также нерекры
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вырезания изделий | 1973 |
|
SU479574A1 |
| Полуавтомат для заточки мелкомодульного многолезвийного инструмента | 1968 |
|
SU301030A1 |
| Автомат для вышлифовки винтовых поверхностей и заточки зубьев на цилиндрической поверхности и торце концевого инструмента | 1984 |
|
SU1172678A1 |
| Электропривод трубопроводной арматуры с ручным дублером | 1980 |
|
SU974008A1 |
| Устройство для получения замкнутых прямоугольных контуров | 1980 |
|
SU870009A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444429C1 |
| Резьбонарезной станок | 1981 |
|
SU990447A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ СО СДВОЕННОЙ ХРАПОВОЙ ПЕРЕДАЧЕЙ | 2013 |
|
RU2510614C1 |
| Станок для точения фланцев | 2021 |
|
RU2780213C1 |
| Приспособление для сообщения возвратно-вращательных движений шпинделям в станках для притирки клапанов | 1935 |
|
SU46162A1 |
