Известны дискретные следящие системы для регулировки управляемого объекта по среднему изменению величины параметров задающего устройства и самого объекта в заданный момент, содержащие счетчики дискретных значений, преобразователи непрерывных величин в дискретные, устройства рассогласования, реле времени, триггеры и логические элементы.
Предложенная система отличается от известных тем, что в ней выходы преобразователей непрерывных величин в дискретные подключены ко входам счетчиков, выходы которых соединены со входами устройств рассогласования. Выходы устройств рассогласования подключены ко входам схемы совпадений и к дифференцирующим звеньям, выходы которых через собирательную схему и инвертор соединены со сбросовыми входами счетчиков. Выход схемы совладений подключен к инвертору, выход которого соединен со сбросовыми входами двух триггеров и через блокировочное реле времени и две управляемые сигналами с выходов дифференцирующих звеньев схемы совпадений подключен к установочным входам тех же триггеров, выходы которых соединены с обмотками поляризованного реле исполнительного механизма управляемого объекта.
Это дозволило ослабить чувствительность следящей системы к кратковременным возмущениям при регулировке рассогласования параметров задающего устройства и управляемого объекта в допустимых пределах.
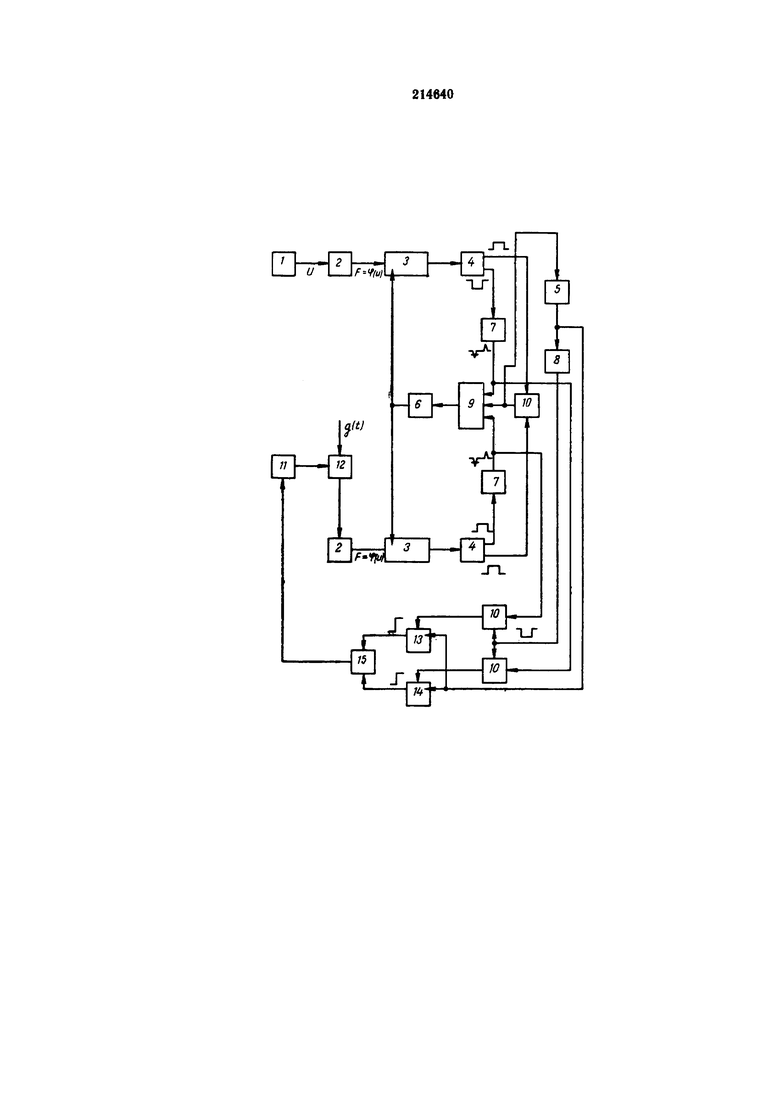
На чертеже приведена функциональная схема дискретной следящей системы.
Схема содержит задающее устройство 1, преобразователи 2 непрерывных величин в дискретные, счетчики 3 дискретных величин, устройства рассогласования 4, инвертирующие устройства 5 и 6, дифференцирующие звенья 7, электронное реле времени 8, собирательную схему 9, схемы совпадений 10, исполнительный механизм 11, управляемый объект 12, электронные реле (триггеры) 13 и 14, поляризованное реле 15.
От задающего устройства 1 и управляемого объекта 12 через преобразователи 2 непрерывных величин в дискретные на входы счетчиков 3 поступают импульсы, частота повторений которых зависит от изменения непрерывной величины:
F=φ(U),
где F - частота повторений импульсов; U - непрерывная величина.
Разрядность счетчиков 3 и диапазон изменения частоты повторений импульсов устанавливают в зависимости от времени срабатывания исполнительного механизма 11 и требуемой чувствительности системы
где tсч - время заполнения счетчиков; К - разрядность счетчиков; F - частота повторений входных импульсов.
После заполнения счетчиков 3 сигналы поступают соответственно на устройства рассогласования 4, выполненные в виде электронных реле времени, которые выдают разнополярные импульсы, длительность которых равна времени рассогласования τр.
Время рассогласования устанавливают конкретно для каждого управляемого объекта:

Если частоты дискретных значений, поступающие на входы счетчиков 3, совпадают, то совпадут по времени и импульсы рассогласования, положительные значения которых поступают на схему совпадений 10 и формируют сбросовые и блокировочный импульсы.
При несовпадении частот на входах счетчиков 3 быстрее заполнится тот из них, на который поступает более высокая частота входных импульсов. После заполнения счетчика срабатывает устройство рассогласования 4. Если за время заполнения счетчика 3 плюс время рассогласования (τр) не заполнится другой счетчик, то по заднему фронту отрицательного импульса рассогласования произойдет сброс счетчиков 3 в начальное состояние, а через одну их схем совпадений 10 сработает один из триггеров 13 или 14, что, в свою очередь, заставит сработать поляризованное реле 15, которое управляет реверсом исполнительного механизма 11, а следовательно, и управляемым объектом 12.
После выравнивания частот на входах счетчиков 3 триггер 13 или 14 срабатывается в начальное состояние, причем схемы совпадений 10 в этот момент блокируются отрицательным импульсом реле времени 8, длительность которого больше или равна τр.
При воздействии на управляемый объект 12 внешних возмущающих воздействий g (t) принцип работы системы остается без изменений, но при этом учитывается лишь среднее значение рассогласования параметров задающего устройства 1 и управляемого объекта 12 в заданный период времени, т.е. система при необходимости может быть нечувствительна к случайным изменениям параметров задающего устройства и управляемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Программная следящая система | 1981 |
|
SU1108394A1 |
| ИЗМЕРИТЕЛЬ АМПЛИТУДНО-ЧАСТОТНЫХ И ФАЗО- ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕТЫРЕХПОЛЮСНИКОВ | 1968 |
|
SU212362A1 |
| Устройство для управления протезами верхних конечностей | 1984 |
|
SU1333332A1 |
| УСТРОЙСТВО для УМНОЖЕНИЯ ЧАСТОТЫ | 1970 |
|
SU259150A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Устройство для регулирования скорости шахтного подъемника | 1978 |
|
SU779230A1 |
| ЭКСТРЕМАЛЬНЫЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1967 |
|
SU189926A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| ЦИФРОВОЙ КОМПЕНСАТОР ПЕРЕМЕННОГО ТОКА С ДИСКРЕТНЫМ УРАВНОВЕШИВАНИЕМ | 1967 |
|
SU197751A1 |
| ЦИФРОВОЙ ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР | 1968 |
|
SU212358A1 |
Дискретная следящая система для регулировки управляемого объекта по среднему изменению величины параметров задающего устройства и самого объекта в заданный момент времени, содержащая счетчики дискретных значений, преобразователи непрерывных величин в дискретные, устройства рассогласования, реле времени, триггеры и логические элементы, отличающаяся тем, что, с целью ослабления чувствительности следящей системы к кратковременным возмущениям при регулировке рассогласования параметров задающего устройства и управляемого объекта в допустимых пределах, в ней выходы преобразователей непрерывных величин в дискретные подключены ко входам счетчиков, выходы которых соединены со входами устройств рассогласования; выходы устройств рассогласования подключены ко входам схемы совпадений и к дифференцирующим звеньям, выходы которых через собирательную схему и инвертор соединены со сбросовыми входами счетчиков; выход упомянутой схемы совпадений подключен к инвертору, выход которого соединен со сбросовыми входами двух триггеров и через блокировочное реле времени и две управляемые сигналами с выходов дифференцирующих звеньев схемы совпадений подключен к установочным входам тех же триггеров, выходы которых соединены с обмотками поляризованного реле исполнительного механизма управляемого объекта.
