Известны автоматы для извлечения бутылок из ящиков, состоящие из подводящего транспортера, приемно-передаточного приспособления с носителями для бутылок и отводящего транспортера.
В предлагаемом автомате для извлечения бутылок и подобной им тары из ящиков, преимущественно картонных, более точно совпадают ячейки ящиков с носителями приемно-передаточного приспособления и повышается надежность работы.
Это достигается тем, что подводящий транспортер снабжен захватом для ящиков, установленным на валу его ведущей станции и приводимым во вращательное движение; кроме того, для захвата ящиков носители, установленные на приемно-передаточном приспособлении, имеют выступы; для облегчения выпадения бутылок из ящиков и носителей в контуре приемно-передаточного приспособления установлен вибратор, служащий одновременно и направляющей для его цепи; для предотвращения преждевременного выпадения стеклотары из ящиков и из носителей рекомендуют подводящий транспортер и приемно-передаточное приспособление оградить кожухом; для отгибания клапанов ящиков над подводящим транспортером следует установить ролики; для поштучного отделения ящиков с бутылками и удержания их в неподвижном состоянии подводящий транспортер целесообразно снабдить приводимыми в качательное движение двуплечими рычагами с роликами; для исключения заклинивания бутылок при передаче их на отводящий транспортер необходимо, чтобы скорость движения последнего превышала скорость движения приемно-передаточного приспособления; для удержания ящиков с бутылками при передаче их на приемно-передаточное приспособление целесообразно захваты снабдить эластичными прокладками.
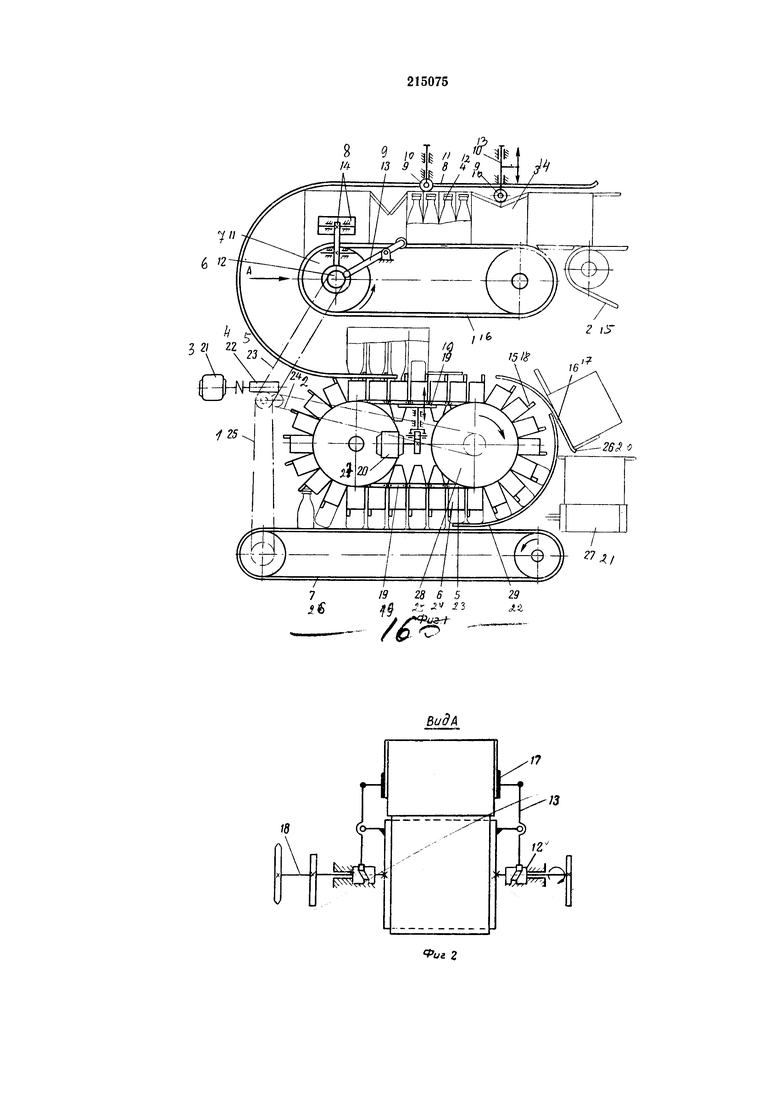
На фиг. 1 схематично изображен предлагаемый автомат для извлечения бутылок из ящиков; на фиг. 2 - зажимное устройство короба, повернутое по отношению к автомату согласно стрелке А на фиг. 1.
Предлагаемый автомат состоит из подводящего транспортера 1, предназначенного для приема от общецехового транспортера 2 коробов 3 с пустыми бутылками 4; приемно-передаточного приспособления, выполненного в виде щепного транспортера 5 с носителями 6 бутылок и отводящего транспортера 7.
Подводящий транспортер 1 огражден кожухом 8, который одновременно является и направляющей движения коробов. Над транспортером 1 имеются направляющие ролики 9 и направляющие втулки 10, свободно перемещающиеся вниз-вверх для отгибания клапанов короба. На ведущем шкиве 11 расположен кулачок 12, приводящий в движение двуплечий рычаг 13 и автоматический захват 14.
Носители 6 бутылок имеют выступы 15, способствующие передвижению коробов 3 к направляющей 16.
Захваты представляют собой колодки 17, установленные на двуплечих рычагах 13, шарнирно укрепленных на ведущем шкиве 11, который закреплен на валу 18. Захваты приводятся в движение при помощи кулачка 12, установленного на том же валу 18.
В контуре транспортера 5 установлен вибратор 19, представляющий собой площадку, являющуюся одновременно направляющей цепи носителей, приводимую в возвратно-поступательное движение от электродвигателя 20.
Таким образом, носители бутылок, а вместе ними и короб, получают заданную вибрацию, благодаря чему бутылки надежно переходят из ячеек короба в носители транспортера. Колебательное движение носителей бутылок обеспечивает длительное совпадение осей ячеек короба с осями носителей бутылок, в результате чего образуется достаточно времени для перехода бутылок из ячеек короба в носители, исключается проскальзывание короба относительно транспортера и соблюдается заданный ритм поступления бутылок на транспортер 7.
Все три транспортера приводятся в движение от одного электродвигателя 21 посредством редуктора 22 и системы передач 23, 24, 25.
Автомат работает следующим образом. Короба 3 с пустыми бутылками 4 и предварительно открытыми клапанами поступают на транспортирующую ленту подводящего транспортера 1. Там короб 3 в исходном положении задерживается двуплечим рычагом 13 до момента подхода автоматического захвата 14; затем, двигаясь вместе с транспортером 5, короб зажимается захватом 14, который в свою очередь делает поворотное движение на 180°. При повороте захват 14 раскрывается кулачком 12, и короб вверх дном попадает на носители 6 приемно-передаточного приспособления. Бутылки 4 горлышками вниз поступают в носители 6, а короб выступами 15, закрепленными на носителях, передвигается к направляющей 16, где под действием силы тяжести совершает движение вниз до упора 26 направляющей, опрокидывается и попадает на выносной транспортер 27 для коробов клапанами вверх.
Бутылки в носителях в процессе движения совершают поворот на 180° вокруг оси ведущей звездочки 28 транспортера 5. Пройдя ограждающий кожух 29, бутылки оказываются повернутыми горлышком кверху, а затем они поступают на отводящий транспортер 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ РОЗЛИВА ЖИДКОСТЕЙ В ТАРУ | 1968 |
|
SU208513A1 |
| Универсальная машина для разливочно-укупорочного производства | 1929 |
|
SU27569A1 |
| Устройство для укладки бутылок в ящики | 1982 |
|
SU1098869A1 |
| МАШИНА ДЛЯ НАКЛЕИВАНИЯ АКЦИЗНОЙ МАРКИ НА ГОРЛЫШКО УКУПОРЕННОЙ БУТЫЛКИ | 1997 |
|
RU2121454C1 |
| УСТРОЙСТВО для ПЕРЕВОРАЧИВАНИЯ БУТЫЛОК И ПОДОБНЫХ ПРЕДМЕТОВ | 1972 |
|
SU330608A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УКУПОРКИ СТЕКЛОТАРЫ | 1968 |
|
SU220131A1 |
| УСТРОЙСТВО для ИЗВЛЕЧЕНИЯ БУТЫЛОК ИЗ ЯЩИКОВ | 1965 |
|
SU174546A1 |
| Автомат для этикетировки бутылок | 1954 |
|
SU100516A1 |
| ЕСЕСОЮвНАЯm^iim-iim-^m | 1973 |
|
SU379467A1 |
| Устройство для укладки бутылок в тару | 1982 |
|
SU1097522A1 |
1. Автомат для извлечения бутылок и подобной им тары из ящиков, преимущественно картонных, снабженных клапанами, содержащий подводящий транспортер для ящиков с бутылками, приемно-передаточное приспособление с носителями для бутылок и отводящий транспортер, отличающийся тем, что, с целью более точного совпадения ячеек ящиков с носителями приемно-передаточного приспособления и повышения надежности работы, подводящий транспортер снабжен захватом для ящиков, установленным на валу его ведущей станции и приводимым во вращательное движение; приемно-передаточное приспособление выполнено в виде цепного транспортера, а носители установлены на этом транспортере и имеют выступы для захвата ящиков.
2. Автомат по п. 1, отличающийся тем, что, с целью облегчения выпадения бутылок из ящиков и из носителей приемно-передаточного приспособления, в контуре последнего установлен вибратор, служащий одновременно направляющей для его цепи.
3. Автомат по пп. 1 и 2, отличающийся тем, что, с целью предотвращения преждевременного выпадения стеклотары из ящиков, подводящий транспортер и приемно-передаточное приспособление снабжены кожухами, расположенными по траектории криволинейного движения ящиков.
4. Автомат по пп. 1 и 3, отличающийся тем, что, с целью непрерывного накопления ящиков с бутылками на подводящем транспортере, над последним установлены ролики для отгибания клапанов ящиков
5. Автомат по пп. 1, 3 и 4, отличающийся тем, что, с целью поштучного отделения ящиков с бутылками, подводящий транспортер имеет приводимый в качательное движение двуплечий рычаг с роликами для удержания ящиков в неподвижном состоянии.
6. Автомат по пп. 1, 2, 3, 4 и 5, отличающийся тем, что для исключения заклинивания бутылок при передаче их на отводящий транспортер последний имеет скорость движения, превышающую скорость движения приемно-передаточного приспособления.
7. Автомат по пп. 1, 3, 4 и 5, отличающийся тем, что, с целью надежного удержания ящиков с бутылками при передаче их на приемно-передаточное приспособление, захват имеет эластичные прокладки.
