Известные приборы для решения задач на расхождение судов в условиях ограниченной видимости, содержащие корпус с крышкой из органического стекла, под которой размещены лампы подсветки, радиолокационный планшет и пантографный механизм, связанный с указателем курсовых углов, не обеспечивают достаточной скорости расчета параметров маневра на уклонение от опасного сближения с одним или несколькими судами.
Предлагаемый прибор отличается от известных тем, что в нем указатель курсов снабжен подвижной кареткой, шарнирно связанной с рычажным пантографным механизмом, несущим линейки с движками для переноса расчетных позиций встречных судов.
Такое выполнение устройства позволяет ускорить производство расчета параметров маневра на уклонение от опасного сближения с одним или несколькими судами.
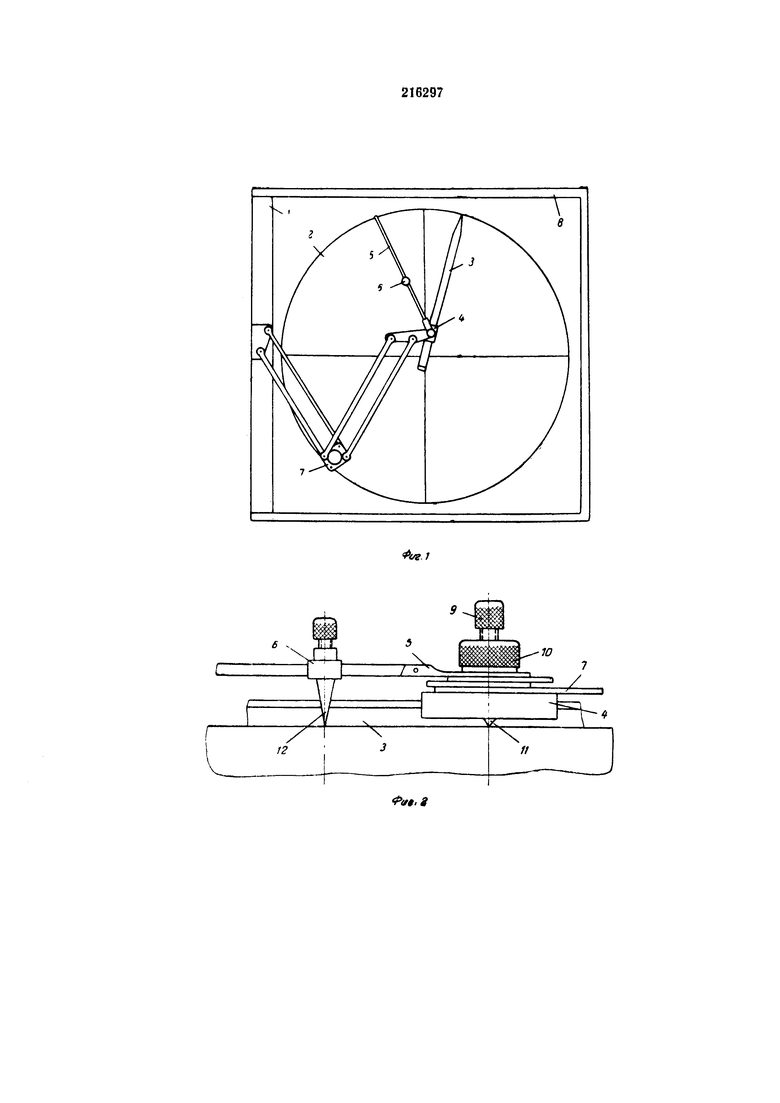
На фиг. 1 представлен предлагаемый прибор, вид сверху; на фиг. 2 - то же, вид сбоку на рабочий узел.
Прибор включает основание 1, радиолокационный планшет 2, указатель 3 курсовых углов с кареткой 4, линейку 5 с движком 6 и рычажный пантографный механизм 7.
Основание 1 прибора выполнено в виде прямоугольной коробки, на крышке которой с помощью рамки 8 закрепляют отпечатанный на бумаге радиолокационный планшет 2.
Указатель 3 курсовых углов, выполненный в виде направляющей установлен с возможностью вращения вокруг вертикальной оси, совпадающей с центром планшета. При решении задач каретку 4 фиксируют с помощью винта 9 на расстоянии от центра планшета, соответствующем скорости своего судна.
Каретка 4 шарнирно связана с пантографным механизмом 7, несущим одну или несколько линеек 5 с движками 6, предназначенными для переноса точек - расчетных позиций встречных судов (на фиг. 1 показана только одна линейка 5).
Линейки выполнены откидными в вертикальной плоскости и закреплены гайкой 10 с возможностью поворота вокруг оси шарнирной связи.
Для обеспечения возможности работы с прибором в условиях темноты крышка основания изготовлена из органического стекла, а под ней размещены малогабаритные электрические лампы для подсветки планшета.
Для решения задач по расхождению судов на планшет по данным радиолокатора наносят точки - расчетные позиции встречного судна: в момент обнаружения и при повторном наблюдении через 6-12 мин (на чертеже не указано). Для того чтобы определить дистанцию опасного сближения (своего и встречного) судов, устанавливают линейку 5 по направлению этих позиций так, чтобы она была перпендикулярна указателю 3 курсовых углов.
Расстояние от центра планшета до визира 11 каретки будет искомой дистанцией.
Определение угла отворота своего судна для осуществления маневра на изменение курса производят следующим образом. На планшете из второй позиции проводят линию ожидаемого относительного движения (ЛООД) встречного судна, касательную к окружности, радиусом которой является принимаемая судоводителем дистанция для безопасного расхождения судов.
Указатель 3 курсовых углов устанавливают по направлению истинного курса, а каретку 4 - на расстоянии от центра планшета, соответствующем скорости своего судна. Острие 12 движка 6 фиксируют на второй позиции. Затем указатель 3 поворачивают (влево или вправо) до совпадения острия 12 с линией ЛООД. Угол между истинным курсом и новым положением указателя будет искомым углом отворота судна.
Определение величины скорости (для осуществления маневра на изменение скорости своего судна) производят перемещением каретки 4 к центру планшета до совмещения острия 12 движка с линией ЛООД.
Решение задачи для осуществления маневра на одновременное изменение курса и скорости содержит действия, описанные выше для каждого из параметров в отдельности.
В случае расхождения с несколькими судами, для ускорения решения задачи вводят в действие соответствующее число линеек 5 с движками.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ РЕШЕНИЯ ЗАДАЧ НА РАСХОЖДЕНИЕ СУДОВ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 1969 |
|
SU238182A1 |
| Маневренный планшет | 1987 |
|
SU1509939A1 |
| Маневренный планшет | 1990 |
|
SU1785005A1 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
| Прибор для решения штурманских задач | 1982 |
|
SU1137483A1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ И СУДНА ОТ ПОРАЖЕНИЯ ТОРПЕДОЙ | 2019 |
|
RU2733732C1 |
| Планшет Подорова | 1987 |
|
SU1451728A1 |
| Способ информационного обеспечения судоводителя о надводной обстановке | 2023 |
|
RU2833310C1 |
Прибор для решения задач на расхождение судов в условиях ограниченной видимости, содержащий корпус с крышкой из органического стекла, под которой размещены лампы подсветки, радиолокационный планшет и пантографный механизм, связанный с указателем курсовых углов, отличающийся тем, что, с целью ускорения расчета параметров маневра на уклонение от опасного сближения с одним или несколькими встречными судами, в нем указатель курсов снабжен подвижной кареткой, шарнирно связанной с рычажным пантографным механизмом, несущим линейки с движками для переноса расчетных позиций встречных судов.
