1:
Известны приводу поворота рабочих органов крана, например стрелы.
Предложенный привод выполнен в виде гироскопического устройства, подвешиваемого на любую поворачивающуюся часть крана. Ось подвески устройства расположена параллельно оси поворота рабочего органа и находится в плоскости вращения в среднем положении гироскопа. Гироскоп раскачивается посредством приводной системы в плоскости, перпендикулярной плоскости его вращения. На оси подвеса расположен стопорный механизм, обеспечивающий передачу крутящего момента подвески гироскопа в нужном направлении.
Благодаря такому выполнению привода упрощается его монтал и демонтаж вследствие исключения механической связи между приводом и механизмом поворота рабочего органа.
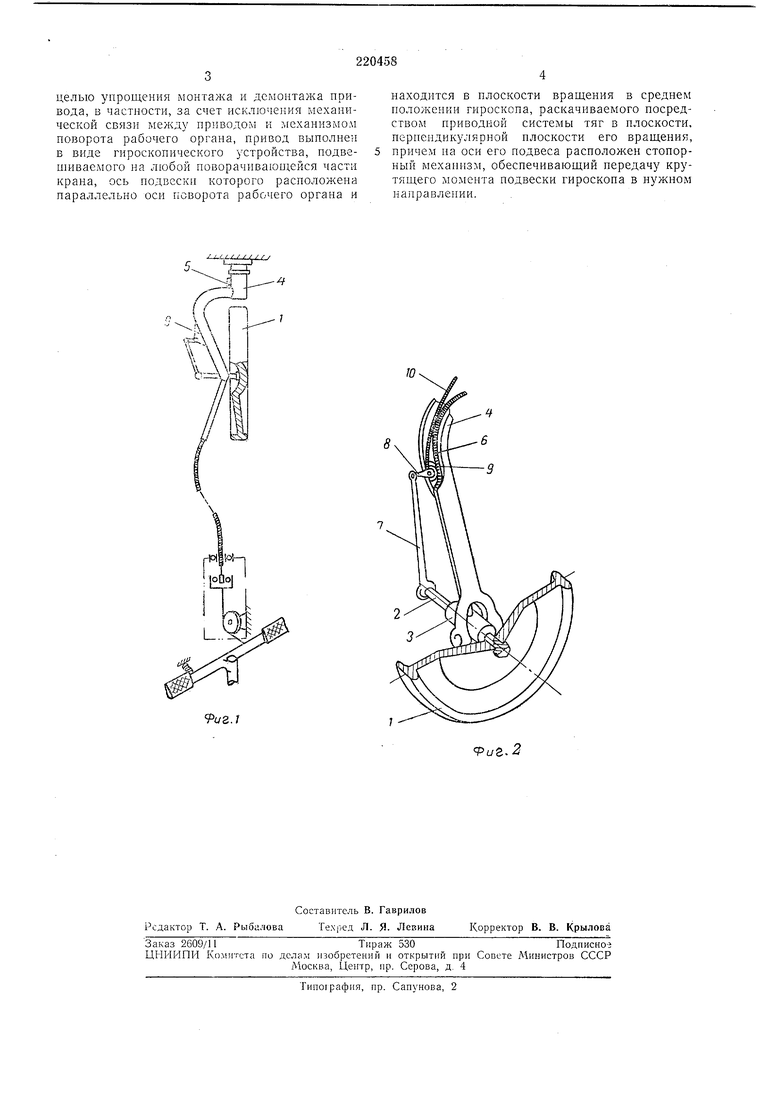
На фиг. 1 изображен описываемый привод; на фиг. 2 - гироскоп.
Привод поворота рабочего органа крана, например стрелы, содержит ротор гироскопа 1, вал 2 которого расположен в обойме 3, шарнирно закрепленной в вилке подвески 4. Привод с помощью подвески подвешивается на любой поворачивающейся части крана. Подвеска может свободно вращаться вокруг вертикальной оси до включения одного из
односторонних стопорных механизмов 5. Питание гироскопа осуществляется через гибкий вал 6. Одновременно с вращением гироскопа в момент поворачивающегося усилия происходит принудительное качание вала 2 гироскопа. Для этого вал 2 соединен с приводной системой тяг 7 и 8, связанной с гидравлическим шестеренчатым наСосом 9, питаемым по магистрали 10, проходящей внутри подвески 4 гироскопа.
Принцип действия привода поворота рабочего органа крана заключается в следующелг К валу 2 через тяги 7 и 5 прикладывают
силовой момент. В результате этого гироскоп раскачивается в плоскости, перпендикулярной плоскости его вращения. При этом гироскоп начинает прецессировать, разворачивая подвеску 4.
При включении одностороннего стопорения подвеска в одну сторону разворачивается свободно, а в другую передает момент на стопорный механизм 5, который соединен с корпусом стрелы крана. Стрела крана разворачивается в сторону действия приложенного момента.
Предмет изобретения
целью упрощения монтажа и демонтажа привода, в частности, за счет искл очения механической связи между приводом и механизмом поворота рабочего органа, привод выполнен в виде гироскопического устройства, подвеП1иваемого на любой новорачпваюо1сйся части крана, ось подвески которого расположена параллельно оси поворота рабочего органа и
находится в плоскости вращения в среднем поло;кенкп гироскопа, раскачиваемого посредством приводной системы тяг в плоскости, перпендикулярной плоскости его вращения, причем па оси его подвеса расположен стопорный механизм, обеспечивающий передачу крутящего момента подвески гироскопа в нужном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОВОРОТА КРЮКА МОНТАЖНОГО КРАНА С ИСПОЛЬЗОВАНИЕМ ГИРОСКОПИЧЕСКОГО ЭФФЕКТА | 2005 |
|
RU2343102C2 |
| Устройство для монтажа и демонтажа шнековых секций на шнекобуровой машине | 1981 |
|
SU989057A1 |
| Устройство для сборки деталей | 1973 |
|
SU444618A1 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2736896C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2754118C2 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| РУЧНАЯ БОРТОВАЯ ТАЛЬ | 1991 |
|
RU2016836C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗИРОВАННЫЙ КИНО-ТЕЛЕОПЕРАТОРСКИЙ КРАН | 1996 |
|
RU2115615C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНОЕ УСТРОЙСТВО | 1990 |
|
RU2043707C1 |
| СПОСОБ ГЛОБАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И ПРИБОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2306528C2 |
9угл
