1. Область техники, к которой относится изобретение.
Изобретение относится к навигационной технике и технологии, используемых на сухопутном и морском транспорте, в подводной и ракетной технике, космонавтике и авиации.
2. Уровень техники.
Известные спутниковые системы глобального позиционирования, вместе с высокими функциональными качествами, все же имеют ряд недостатков, которые снижают эффективность системы. Прежде всего, это наличие перерывов в функционировании системы при потере радиосвязи с навигационными спутниками, угроза радиопомех, отсутствие полной скрытности, ограниченная живучесть и высокая стоимость.
Инерциальные системы навигации [1], основанные на интегрировании линейных ускорений носителя, также имеют недостатки, такие как накопление инструментальных ошибок измерения ускорений, необходимость производства поправок по результатам измерения координат другими методами.
Большую роль в навигационных системах играют гироскопические устройства. В частности, они являются основой для гирокомпасов, в функции которых входит определение частей света (ориентирование) и курсовых углов, датчиков линейных ускорений и многих других приборов. К сожалению, существующие гирокомпасы чувствительны к маневрированию носителя и после маневра входят в меридиан за несколько часов [2], т.е. они инерционны.
Здесь дано принципиальное решение гироскопического прибора, совмещающего функции автономного глобального позиционирования и гирокомпаса, не чувствительного к маневрам носителя и бесперебойного в действии. Автономность прибора выгодно отличает его от спутниковых систем глобального позиционирования. Отсутствие же накопленных ошибок также очевидное преимущество его в сравнении с инерциальными системами навигации, интегрирующими линейные ускорения для получения координат.
3. Раскрытие изобретения.
3.1. Определение долготы места.
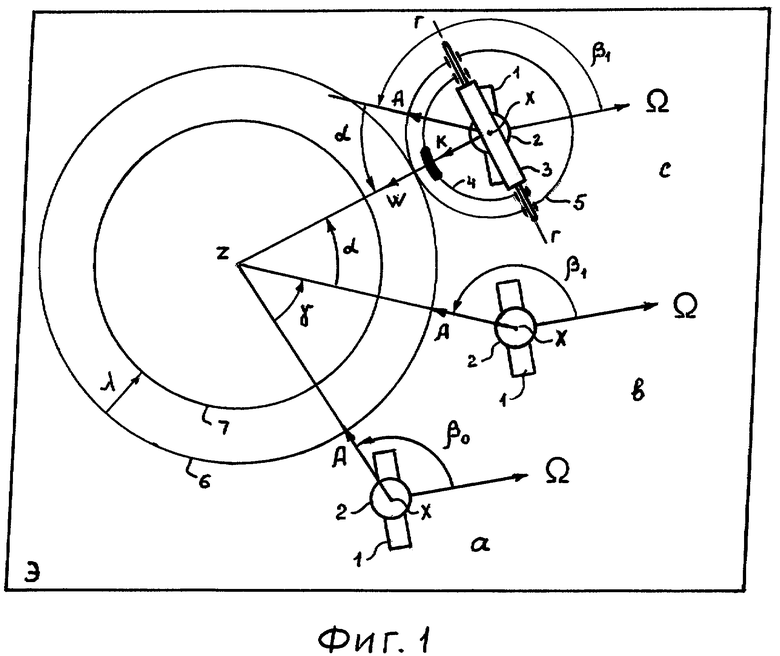
В основу автономного прибора глобального позиционирования и ориентирования (ГПО) положен свободный гироскоп, чья ось вращения или совпадающий с ней вектор вращения Ω установлен перпендикулярно оси вращения Земли Z. Таким образом, гироскоп 1 (Фиг.1), сохраняя неизменным свое угловое положение в пространстве и находясь на поверхности Земли, совершает кажущееся вращение вправо вокруг оси X, проходящей через него параллельно оси Земли Z. Установим на гироскоп 1 часовой механизм 2 через его стрелочную ось так, чтобы она совпадала с осью X, и заставим ее вращаться со скоростью 1 оборот за 23 часа 56 мин 4 сек, т.е. один сайдериал (sidereal) день [3].
В результате часовой механизм компенсирует кажущееся вращение гироскопа, и корпус часового механизма останется неподвижным относительно поверхности Земли. Если на этот корпус нанести вектор А, т.е. указатель, направленный в сторону оси Земли Z, то, в принципе, данный указатель будет показывать исходное направление на ось Земли, оставаясь параллельным самому себе всегда при последующих перемещениях носителя. И это при отсутствии непосредственного контакта прибора с Землей.
На Фиг.1 гироскопическое устройство показано находящимся в экваториальной плоскости Э, вращающейся вместе с Землей. Несмотря на то что плоскость Э повернулась на угол γ, вектор А продолжает указывать на земную ось благодаря компенсирующему действию часового механизма, установившего свой корпус и указатель А по отношению к вектору гироскопа Ω на угол β1=β0+γ. Из за сопротивления гироскопа даже кратковременное вращательное усилие не способно изменить статус вектора А, указывающего на земную ось Z.
Любое смещение устройства по плоскости Э не приводит к какому-либо повороту вектора А. Этот вектор совершает лишь плоско параллельное движение, оставаясь параллельным самому себе, а также тому его состоянию, которое он занимал изначально, указывая на Земную ось Z. Сказанное иллюстрируется на Фиг.1 положениями вектора А в конечных состояниях гироскопического устройства в и с.Состояние с отличается от состояния в лишь относительным угловым смещением самого устройства α относительно Земли за время ее поворота на угол γ.
В сущности, угол α есть приращение долготы места при движении носителя по поверхности Земли. Чтобы определить его инструментально, насадим свободно на ось Х карданное кольцо 3, а на его перпендикулярную ось ГГ насадим полукольцевой отвес 4 весом W. Этот вес разворачивает карданное кольцо 3 осью К в направлении «утерянной» Земной оси Z, заставляя ось ГГ занять положение касательной к экваториальному кругу или любому другому параллельному ему кругу, если носитель сместился с экватора к какому-либо из полюсов. Угол же разворота в точности равен искомому углу α. Замерив его как угол между векторами К и А, получаем этот результат. Другая линия, касательная к поверхности Земли и проведенная перпендикулярно к оси ГГ через ее центр, очевидно, является касательной к меридиану, проходящему через точку нахождения носителя.
Если изначально носитель находился на линии Гринвичского меридиана, то α есть долгота места носителя после его перемещения вдоль экватора или вдоль любой из широт.
3.2. Определение широты места.
При нахождении носителя в экваториальной плоскости полукольцевой отвес также лежит в плоскости экватора. Подъем носителя на широту λ, приводит к повороту отвеса в сторону центра Земли на угол λ вокруг оси ГГ. Таким образом, замерив этот угол поворота, получаем искомый результат. В зависимости от направления движения от экватора широта λ может оказаться северной или южной.
Различные методы демпфирования отвеса могут быть применены для снижения влияния ускорений на его работу. В частности, гироскопическое устройство может быть размещено в котелке 5, наполненном демпфирующей жидкостью, препятствующей смещению отвеса под воздействием посторонних ускорений.
3.3. Определение частей света.
Автономный прибор глобального позиционирования, вычлененный котелком 5, подвешивается (Фиг.2) осью ГГ в 3-степенном карданном подвесе с внутренним 8 и внешним 9 кольцами, который, в свою очередь, устанавливается в носителе 10 на его конструктивной вертикали V, возможно отстоящей от истинной вертикали W, связанной с отвесом 4 (Фиг.1), на угол θ  . В данном случае, для такого носителя как крылатая ракета, этот угол называется углом тангажа. Поскольку соединяющая кольца 8 и 9 ось ММ (Фиг.2) перпендикулярна оси ГГ, то она касается меридиана или просто лежит в его плоскости (если носитель имеет крен), указывая направление на полюс. Сама же ось ГГ касается (как уже установлено) экватора или какой-либо параллели.
. В данном случае, для такого носителя как крылатая ракета, этот угол называется углом тангажа. Поскольку соединяющая кольца 8 и 9 ось ММ (Фиг.2) перпендикулярна оси ГГ, то она касается меридиана или просто лежит в его плоскости (если носитель имеет крен), указывая направление на полюс. Сама же ось ГГ касается (как уже установлено) экватора или какой-либо параллели.
Таким образом, наряду с глобальным позиционированием, прибор в целом обеспечивает также ориентирование носителя относительно частей света, указывая Север, Юг, Восток и Запад и давая возможность автоматически определить (Фиг.2) курсовой угол ∠C, угол тангажа θ и крена ϕ, измеряемый датчиком 11 как угол поворота кольца 8 вокруг неподвижной оси ГГ.
4. Краткое описание чертежей.
Фиг.1
Изображены разные положения свободного гироскопа 1, находящегося в экваториальной плоскости Э, вращающейся вместе с Землей. Непосредственно на оси подвеса X, параллельной оси Земли Z, гироскоп закреплен вместе с часовым механизмом 2, связанным стрелочной втулкой с корпусом гироскопа 1. При вращении Земли корпус часового механизма, вращаясь вместе с плоскостью Э, сохраняет изначальную ориентацию А на Земную ось Z. Любое перемещение сборки гироскопа и часового механизма относительно экваториальной плоскости Э, вращающейся вместе с Землей, приводит к плоско параллельному перемещению вектора А, т.е. два его произвольных следа на плоскости Э имеют на ней одинаковое угловое положение, следовательно, параллельны друг другу (положения в и с).
Однако насажанное на ту же ось подвеса Х карданное кольцо 3 автоматически устанавливается своей осью К навстречу Земной оси Z благодаря весу W полукольцевого отвеса 4, подвешенного на второй оси карданного кольца ГГ. Если за некоторое время t, за которое Земля развернулась на угол γ=β1-β0, носитель совершил свое активное угловое перемещение α, то это перемещение индицируется углом между осью кольца К и указателем изначального положения Земной оси А, установившимися на момент времени t. Если вектор А изначально указывал на Гринвичский меридиан, то α есть долгота, достигнутая носителем на момент времени t.
В случае перемещения носителя также в направлении любого из полюсов полукольцо отвеса 4 отклонится в соответствующую сторону от своего нулевого экваториального положения, совпадающего с осью кольца К. Замер образовавшегося углового отклонения λ дает южную или северную широту места.
Фиг.2
Изображен автономный прибор глобального позиционирования, установленный в носителе с помощью 3-степенного карданного подвеса. Внутреннее кольцо 8 может, через промежуточную ось ММ, качаться вместе с носителем 10 вокруг оси ГГ, удерживаемой горизонтально полукольцевым отвесом 4. Последний размещен в котелке 5 и демпфирован жидкостью с целью противостоять посторонним ускорениям. Промежуточная ось ММ направлена перпендикулярно оси ГГ и потому ориентирована в плоскости или даже вдоль меридиана на полюс, таким образом, прибор также выполняет функцию бесперебойного гирокомпаса. Поэтому угол ∠C между диаметральной плоскостью носителя и осью ММ является курсовым углом носителя. Наружное кольцо карданного подвеса установлено в носителе на конструктивной вертикальной оси V, образующей вместе с истинной вертикалью W угол тангажа θ.
5. Осуществление изобретения.
Поскольку в мире имеется полувековой опыт проектирования, изготовления и эксплуатации инерционных гироскопических и часовых приборов подобно рассмотренным, данное изобретение реально и осуществимо. Дополнительно к описанным элементам в приборе должны быть смонтированы сервисные подсистемы энергоснабжения, контроля и управления, позволяющие, в частности, арретировать, фиксировать положение и разгонять гироскоп, устанавливать указатель исходного направления на Земную ось. Они должны измерять углы между этим указателем и карданным кольцом подвеса гиро-часового блока для определения долготы места, между плоскостью полукольцевого отвеса и осью этого карданного кольца - для определения широты места.
Для более полного использования предоставляемых возможностей прибора, таких как функция компаса, измерение курсового угла, крена и тангажа, его 3-степенный подвес должен быть также оснащен средствами измерения этих углов.
Источники информации
1. Комплексная инерциально-спутниковая навигационная система. Публикация 2087867 от 1997.08.20, RU.
2. Справочная книга капитана дальнего плавания. Москва, "Транспорт", 1988.
3. The Oxford Companion to The Earth. Oxford University Press Inc., NY, 2000. ISBN 0-19-854039-6 (page 917).
Изобретение относится к навигационной технике. Прибор глобального позиционирования содержит свободный гироскоп с осью вращения, перпендикулярной оси вращения Земли, но с параллельной ей непосредственной осью подвеса, на которую установлен часовой механизм, имеющий сидериальный период суточного обращения (23 часа, 56 мин, 4 сек), вращающий свой корпус синхронно с Землей так, что зафиксированный однажды на корпусе указатель Земной оси затем сохраняет это направление постоянно, карданным кольцом, удерживающим непосредственную ось подвеса гиро-часового блока и выставляющим свою поперечную ось цапфами наружу, на которые навешен и за которые полукольцевой отвес поворачивает карданное кольцо вместе с собой вокруг непосредственной оси подвеса и отклоняется в цапфах сам в направлении к центру Земли при изменениях носителем соответственно долготы и широты места; 3-степенным карданным подвесом, удерживающим на своей внутренней оси описанный выше блок глобального позиционирования с помощью упомянутых цапф и подвешенный, в свою очередь, в носителе с помощью третьей оси; сервисными подсистемами энергоснабжения, контроля и управления. Технический результат: обеспечение полной автономности прибора. 2 н.п. ф-лы, 2 ил.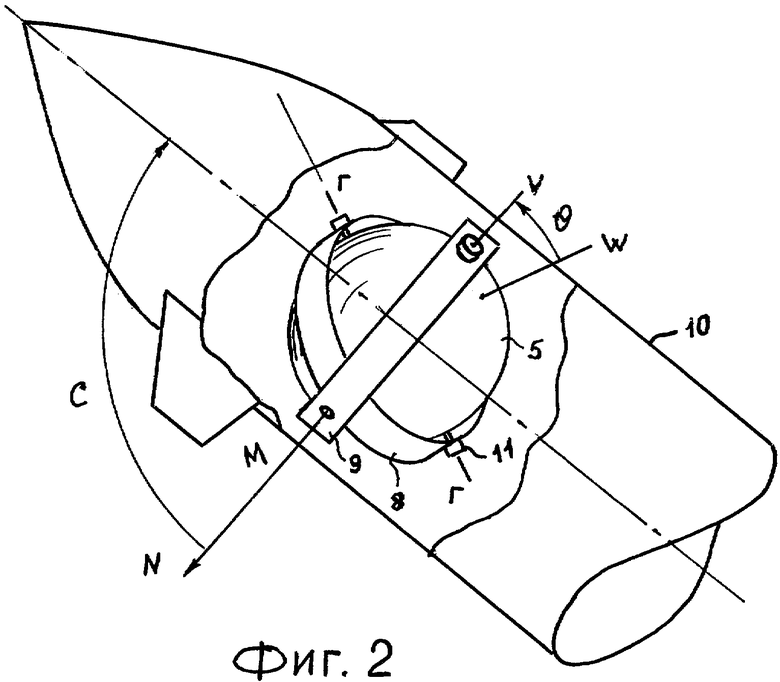
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| Способ приготовления хромового катализатора для деструктивного дегидрирования | 1936 |
|
SU48212A1 |
| DE 3019372 A1, 26.11.1981. | |||

